Download presentation
Presentation is loading. Please wait.

1
Temporal Models Template Models Representation Probabilistic Graphical

2
Distributions over Trajectories
1 2 3 4 5 Pick time granularity X(t) – variable X at time t X(t:t’) = {X(t), …, X(t’)} (t t’) Want to represent P(X(t:t’)) for any t, t’
 – variable X at time t X(t:t’) = {X(t), …, X(t’)} (t t’) Want to represent P(X(t:t’)) for any t, t’")
3
Markov Assumption Counter example: location and velocity

4
Time Invariance Template probability model P(X’ | X) For all t:
Counter example: day of week, time of day

5
Template Transition Model
Weather Weather’ Velocity Velocity’ Location Location’ Failure Failure’ Obs’ Time slice t Time slice t+1

6
Initial State Distribution
Weather0 Velocity0 Location0 Failure0 Obs0 Time slice 0

7
Ground Bayesian Network
Weather0 Location1 Failure1 Obs1 Time slice 1 Velocity1 Weather1 Location2 Failure2 Obs2 Velocity2 Weather2 Time slice 2 Velocity0 Location0 Failure0 Obs0 Time slice 0

8
2-time-slice Bayesian Network
A transition model (2TBN) over X1,…,Xn is specified as a BN fragment such that: The nodes include X1’,…,Xn’ and a subset of X1,…,Xn Only the nodes X1’,…,Xn’ have parents and a CPD The 2TBN defines a conditional distribution
 over X1,…,Xn is specified as a BN fragment such that: The nodes include X1’,…,Xn’ and a subset of X1,…,Xn. Only the nodes X1’,…,Xn’ have parents and a CPD. The 2TBN defines a conditional distribution.")
9
Dynamic Bayesian Network
A dynamic Bayesian network (DBN) over X1,…,Xn is defined by a 2TBN BN over X1,…,Xn a Bayesian network BN(0) over X1(0) ,…,Xn(0)
 over X1,…,Xn is defined by a. 2TBN BN over X1,…,Xn. a Bayesian network BN(0) over X1(0) ,…,Xn(0)")
10
Ground Network For a trajectory over 0,…,T we define a ground (unrolled network) such that The dependency model for X1(0) ,…,Xn(0) is copied from BN(0) The dependency model for X1(t) ,…,Xn(t) for all t > 0 is copied from BN
 ,…,Xn(0) is copied from BN(0) The dependency model for X1(t) ,…,Xn(t) for all t > 0 is copied from BN")
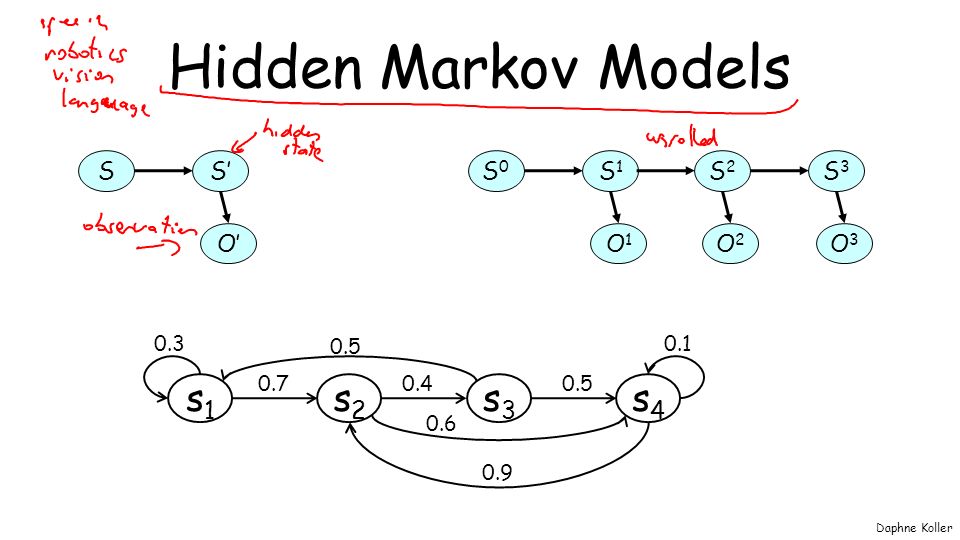
11
Hidden Markov Models s1 s2 s3 s4 S S’ S1 O1 S0 S2 O2 S3 O3 O’ 0.5 0.7
0.3 0.4 0.6 0.1 0.9
12
Consider a smoke detection tracking application, where we have 3 rooms connected in a row. Each room has a true smoke level (X) and a smoke level (Y) measured by a smoke detector situated in the middle of the room. Which of the following is the best DBN structure for this problem? X’1 Y’1 X1 X’2 Y’2 X2 X’3 Y’3 X3 X’1 Y’1 X1 X’2 Y’2 X2 X’3 Y’3 X3 X’1 Y’1 X1 X’2 Y’2 X2 X’3 Y’3 X3 X’1 Y’1 X1 X’2 Y’2 X2 X’3 Y’3 X3
![]()
13
Robot Localization ... u u u x x x x map z z z control signal
1 t-1 robot pose ... x x x x 1 2 t map z z z sensor observation 1 2 t

14
Tim Huang, Dieter Koller, Jitendra Malik, Gary Ogasawara, Bobby Rao, Stuart Russell, J. Weber

15
Consider an application, where we have 3 sources, each making sound (X) simultaneously (e.g., a TV, a blender, and a ringing cellphone). We want to separate the observed aggregate signal (Y) into its unobserved constituent signals. Which of the following is the best DBN structure for this problem? X’1 X1 X’2 X2 X’3 Y X3 X1 X’1 X2 X’2 X3 X’3 Y X’1 Y’1 X1 X’2 Y’2 X2 X’3 Y’3 X3 X’1 Y’1 X1 X’2 Y’2 X2 X’3 Y’3 X3

16
Consider a situation where we have two people in a conversation, each wearing a sensitive lapel microphone. We want to separate each person’s speech (X) using the signal (Y) obtained from their microphone. Which of the following is the best DBN structure for this problem? X1 X’1 X1 X’1 Y’1 Y’1 X2 X’2 X2 X’2 Y’2 Y’2 X1 X’1 X1 X’1 Y’1 X2 X’2 Y’1 X2 X’2 Y’2 Y’2

17
Summary DBNS are a compact representation for encoding structured distributions over arbitrarily long temporal trajectories They make assumptions that may require appropriate model (re)design: Markov assumption Time invariance
design: Markov assumption. Time invariance.")
Similar presentations

>")











 Process A temporal process is the evolution of system state over time Often the system state.>")

 state variable Single (observed) observation variable Transition probability.>")



