Download presentation
Presentation is loading. Please wait.

1
Lecture 8: Rolling Constraints II
Generalizations and review Nonhorizontal surfaces Coin rolling on a slope Small sphere rolling on a larger sphere’s surface Hoop rolling inside a hoop

2
What can we say in general?
vector from the inertial origin to the center of mass Lagrangian rotation vector constraint vector from the contact point to the center of mass

3
mgz We can restrict our attention to axisymmetric wheels
and we can choose K to be parallel to the axle without loss of generality g dot R is just gz if z denotes the oriented inertial coordinate mgz

4
If we don’t put in any simple holonomic constraint (which we often can do)
")
5
We know v and w in terms of q any difficulty will arise from r
Actually, it’s something of a question as to where the difficulties will arise in general This will depend on the surface I don’t know if we’ll get to the general surface flat, horizontal surface — we’ve been doing this flat surface — we can do this today general surface: z = f(x, y) — this can be done for a rolling sphere
 — this can be done for a rolling sphere.")
7
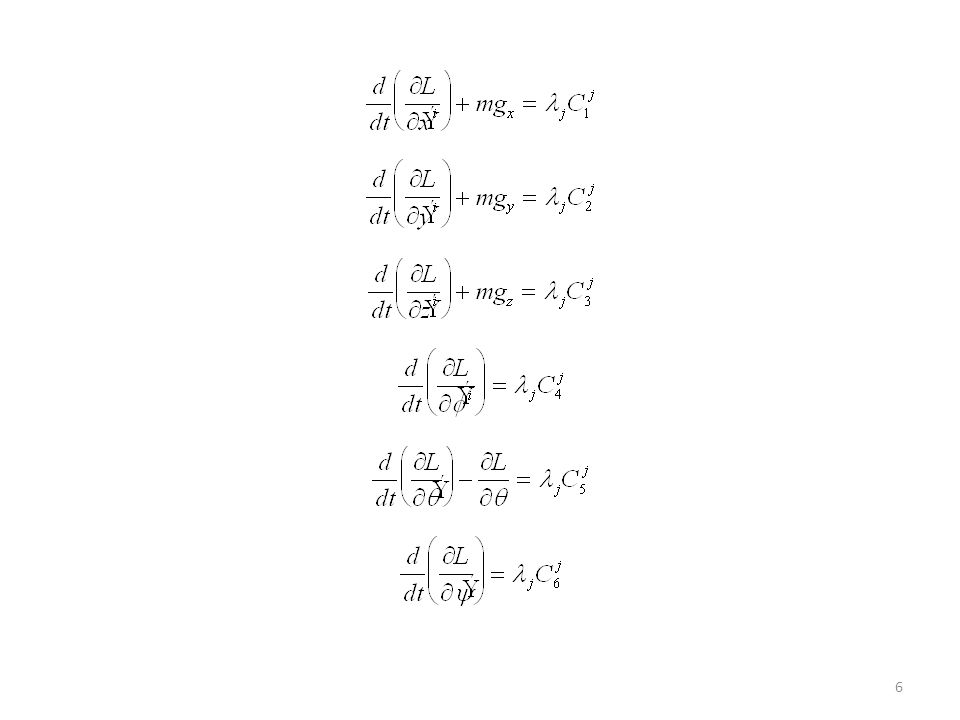
We have the usual Euler-Lagrange equations
and we can write out the six equations

8
The key to the problem lies in the constraint matrix
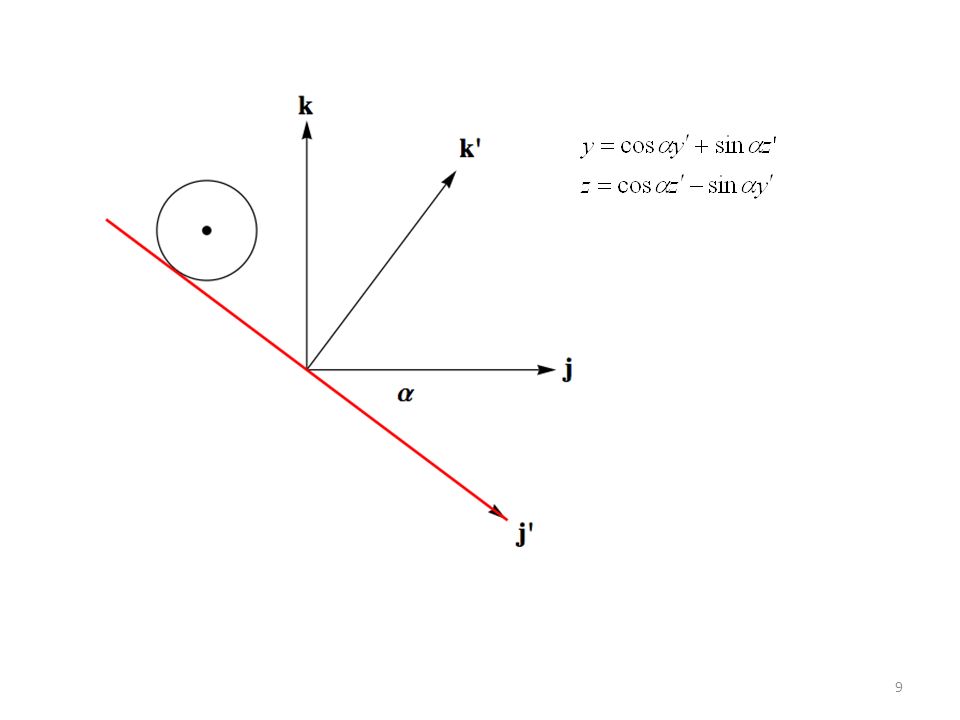
The analysis is pretty simple for flat surfaces, whether horizontal or tilted Let’s play with the tilted surface Choose a Cartesian inertial system such that i and j lie in the tilted plane and choose i to to be horizontal, so that j points down hill (This is a rotation of the usual system about i)
")
10
so the potential energy in the primed coordinates is
the kinetic energy is unchanged We can go forward from here exactly as before everything is the same except for gravity

11
This has the same body system as before
but the angle q can vary (it’s equal to -0.65π here) r remains equal to –aJ2 but we need the whole w
 r remains equal to –aJ2. but we need the whole w.")
12
?? Let’s look at a rolling coin on a tilted surface in Mathematica

13
Curved surfaces Spherical surface: spherical ball on a sphere Two-d surface: wheel inside a wheel General surface

14
Spherical ball on a sphere
holonomic constraint R

15
The Lagrangian simplifies because of the spherical symmetry
We have a constraint, which we can parameterize

16
which transforms the Lagrangian
We can now assign generalized coordinates

17
We have rolling constraints
w is unchanged, and r is as shown on the figure and we recalculate v

18
The rolling constraint appears to have three components
but the normal component has already been satisfied The normal is parallel to r, so I need two tangential vectors

19
We have the usual Euler-Lagrange equations
and we can write out the five equations

21
The constraint matrix is
The last two Euler Lagrange equations are suitable for eliminating the Lagrange multipliers

22
QUESTIONS FIRST?? After some algebra
I have three remaining Euler-Lagrange equations and two constraint equations that I need to differentiate to give me five equations for the generalized coordinates We need to go to Mathematica to see how this goes. QUESTIONS FIRST??

23
Wheel within a wheel Treat them both as hoops radii r1 > r2 c

24
We have holonomic constraints
Put us in two dimensions realize that z1 = r1

25
We have an interesting connectivity constraint —
define the position of the small wheel in terms of the angle c Putting all this in gives us a Lagrangian

26
We define a vector of generalized coordinates

27
There will be two nonholonomic constraints
The corresponding constraint matrix is

28
The second and third Euler-Lagrange equations are fairly simple
so I will use those to find the two Lagrange multipliers To solve the problem we use the first and fourth Euler-Lagrange equations and the differentiated constraints The solution is numerical and we need to go to Mathematica to look at it. QUESTIONS FIRST??

29
That’s All Folks

Similar presentations