Download presentation
Presentation is loading. Please wait.

1
NAPP Photo Five Pockets near Dubois

2
Google Earth

3
Geometric Corrections
Rectification and Registration

4
Learning Objectives Be able to define geometric correction.
Understand why geometric correction is usually necessary. Understand the difference between rectification and registration. Understand what ground control points are and know the characteristics of good GCPs. Understand what we mean by tranformations and the various types

5
Learning Objectives (cont.)
Understand what resampling does, and how different resampling algorithms work Know why we should minimize the number of times we resample images

6
What is Geometric Correction?
Any process that changes the spatial characteristics of pixels. Pixel coordinates (e.g., map projection) Pixel relationship with other pixels Pixel size (or shape) Geometric correction also can change the digital numbers of pixels (resampling)
 Pixel relationship with other pixels. Pixel size (or shape) Geometric correction also can change the digital numbers of pixels (resampling)")
7
Why Geometric Correction?
To allow an image to overlay a map so that features line up correctly To eliminate distortion caused by terrain, instrument wobble, earth curvature, etc. To change the apparent spatial resolution of an image To change the map projection used to display an image

9
Two basic techniques for fitting images to maps
Use Ground Control Points (GCPs) to assign real-world coordinates to an image (rectification). Create links between two images or between the image and a digital map to align them with one another (registration) Both techniques are based on same concept.
 to assign real-world coordinates to an image (rectification). Create links between two images or between the image and a digital map to align them with one another (registration) Both techniques are based on same concept.")
10
Rectification Using GCPs
Object: To match pixel locations in the image to their corresponding locations on the earth Method: Assign real-world coordinates (e.g., UTM) to known locations in the image (GCPs) Create a mathematical model (transformation) to fit the real-world coordinates to the image coordinates “Warp” the image to fit the model.
 to known locations in the image (GCPs) Create a mathematical model (transformation) to fit the real-world coordinates to the image coordinates. Warp the image to fit the model.")
11
Real World Coordinate Frame (e.g., UTM)
Image Coordinate Frame (row/column)
")
12
Ground Control Points (GCPs)
Road intersections, river bends, distinct natural features, etc. GCPs should be spread across image Requires some minimum number of GCPs depending on the type of mathematical transformation (model) you use More usually better than fewer! In general, it is better to have clusters of GCPs spread across image
 you use. More usually better than fewer! In general, it is better to have clusters of GCPs spread across image.")
13
Google Earth – Seminoe Reservoir (Wyoming). Where would you locate GCPs? What are possible problems?
. Where would you locate GCPs What are possible problems")
14
How is image registration different?
Instead of finding GCPs from a map, you link the same place on two or more images Can be used to georeference an unreferenced image using a referenced image Can be used to allow two images to line up with one another (e.g. images from the same place taken on different dates) even if they aren’t georeferenced to ground coordinates.
 even if they aren’t georeferenced to ground coordinates.")
15
Two main steps necessary to fit an image to a map
Transformation: Use a mathematical equation to convert all image GCP coordinates to best match the real world GCP coordinates. Resampling: Assign new DNs to the pixels once they have been moved to their new positions (and often distorted in the process).
.")
16
Result of erroneous GCP coordinates or placement.

17
Mathematical Transformations
Real World Coordinates (e.g., UTM) Points = GCPs; Line = best linear (1st order) fit Image Coordinates (e.g., column, row)
 Points = GCPs; Line = best linear (1st order) fit. Image Coordinates (e.g., column, row)")
18
Mathematical Transformations
1st Order (linear) Requires minimum of 3 GCPs Use for small, flat areas 2nd Order Requires minimum of 6 GCPs Use for larger area where earth curvature is a factor Use where there is moderate terrain Use with aircraft data where roll, pitch, yaw are present
 Requires minimum of 3 GCPs. Use for small, flat areas. 2nd Order. Requires minimum of 6 GCPs. Use for larger area where earth curvature is a factor. Use where there is moderate terrain. Use with aircraft data where roll, pitch, yaw are present.")
19
Mathematical Transformations (cont.)
3rd Order Requires minimum of 10 GCPs Very rugged terrain Typically want at least 3x the minimum number of GCPs (or more!)
")
21
Image Transformation (warping)
Raw Image (No spatial relationship to location on earth) Transformed Image (Matches real-world coordinates; Oriented to north, etc.)
 Transformed Image. (Matches real-world coordinates; Oriented to north, etc.)")
22
Image Resampling Once an image is warped, how do you assign DNs to the “new” pixels? 100 ??
![]()
24
Resampling Techniques
Nearest Neighbor Assigns the value of the nearest pixel to the new pixel location Bilinear Assigns the average value of the 4 nearest pixels to the new pixel location Cubic Convolution Assigns the average value of the 16 nearest pixels to the new pixel location

25
Nearest Neighbor Resampling

26
Bilinear Resampling

27
Cubic Convolution Resampling

28
To maintain image radiometry (DNs) for spectral analysis ALWAYS USE NEAREST NEIGHBOR RESAMPLING!
If your purpose is to produce an image for presentation, bilinear or cubic convolution might work better (can be more visually pleasing). Remember that EVERY TIME you resample an image for any reason you are altering the original data (DNs)!
. Remember that EVERY TIME you resample an image for any reason you are altering the original data (DNs)!")
29
Changing Image Spatial Resolution (A type of Resampling)
Two choices Increase the resolution (artificially make pixels smaller) (also called up-rezzing) Can assign the DN from the original pixel to the smaller pixels that fall inside it, but this doesn’t change the appearance of the image. Decrease the resolution (artificially make pixels larger) Combine the DNs from the original pixels in some way (e.g. average them) to assign a new DN to the bigger pixel
 (also called up-rezzing) Can assign the DN from the original pixel to the smaller pixels that fall inside it, but this doesn’t change the appearance of the image. Decrease the resolution (artificially make pixels larger) Combine the DNs from the original pixels in some way (e.g. average them) to assign a new DN to the bigger pixel.")
30
Changing Map Projections
Map projections are mathematical schemes for depicting part of the spherical earth on a flat map or image Map projections cause distortion of map properties (e.g., shape, direction, area) Every time you change from one map projection to another you transform and resample (and change the DNs!).
 Every time you change from one map projection to another you transform and resample (and change the DNs!).")
31
Geometric Correction -- Summary
Essential for almost all remote sensing projects Critical for combining imagery and GIS Essential for obtaining spatially accurate products—requires considerable care Often done for us “at the factory,” but sometimes not, especially for aerial imagery (air photos, etc.)
")
Similar presentations

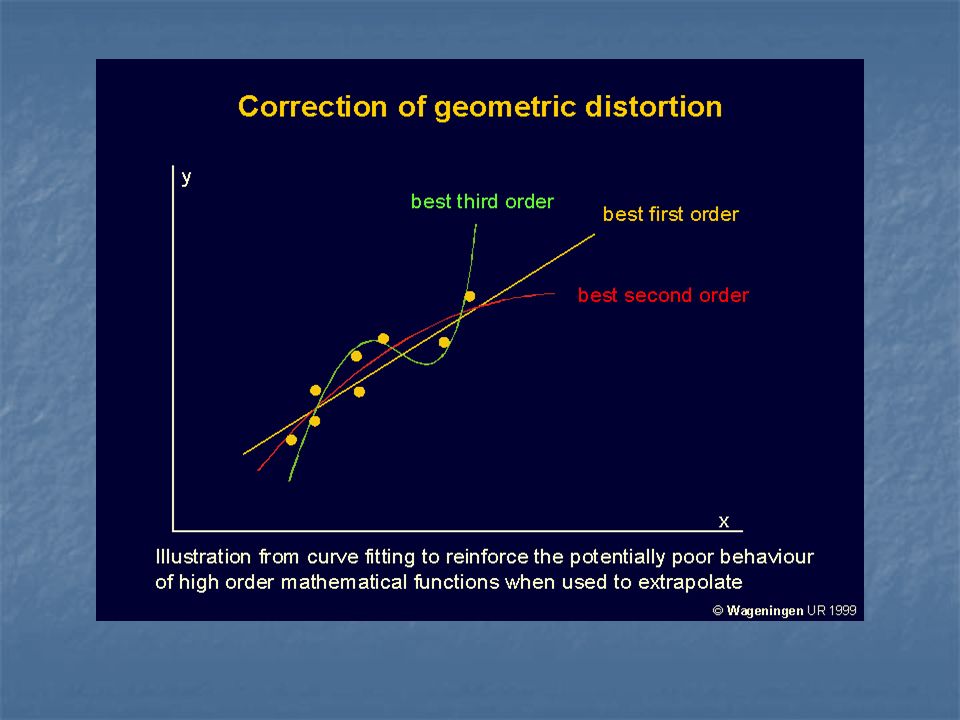
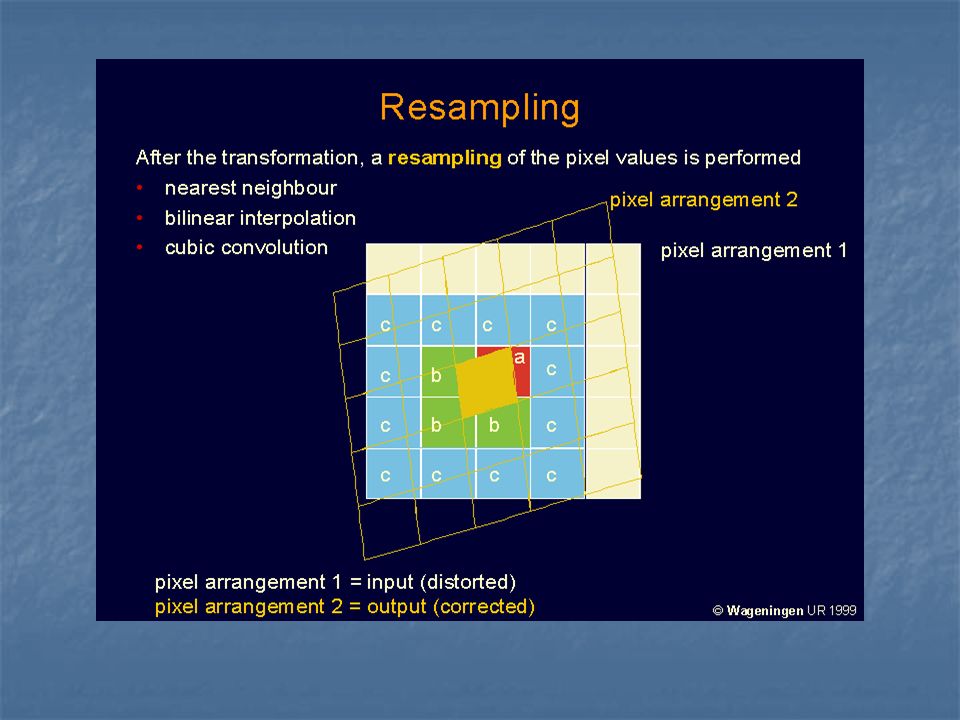



 Image Quality Assessment Radiometric Correction Geometric Correction Image Classification Introduction.>")









>")


. CS 128/ES 228 - Lecture 5a2 Spatial modeling in raster format Basic entity is the cell Region represented.>")


