Download presentation
Presentation is loading. Please wait.

1
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 The SHEq code: an equilibrium calculation tool for SHAx states Emilio Martines, Barbara Momo Consorzio RFX, Associazione Euratom-ENEA sulla fusione, Padova, Italy

2
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 SHAx states SHAx new helical axis DAx magnetic axis X-point O-point Experimentally found in RFX-mod [R. Lorenzini et al., PRL 101, 025005 (2008)] Double Axis Single Helical Axis
] Double Axis Single Helical Axis.")
3
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 The Single Helicity Equilibrium (SHEq) code The SHEq code was an important ingredient of the Nature Physics paper [R. Lorenzini et al., Nature Phys. 5, 570 (2009)]. The code computes for SHAx states in toroidal geometry: Shape of flux surfaces (also for DAx); Average over flux surfaces of any quantity; Safety factor profile; Metric coefficients to be used by ASTRA for transport calculations. Limitations: Force-free; First order in dominant mode amplitude; Fixed model for parallel current density profile ( - 0 ).
]. The code computes for SHAx states in toroidal geometry: Shape of flux surfaces (also for DAx); Average over flux surfaces of any quantity; Safety factor profile; Metric coefficients to be used by ASTRA for transport calculations. Limitations: Force-free; First order in dominant mode amplitude; Fixed model for parallel current density profile ( - 0 )..")
4
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 toroidal flux The approach Canonical magnetic field representation: In general, F=F(r, , ) and = (r, , ). In Single Helicity, F=F(r,u) and = (r,u), where u = m -n . In this case, it can be shown that B· =0, where the helical flux is defined as Thus, the contours of the helical flux give the shape of the flux surfaces. The SHEq code uses the helical flux obtained as superposition of an axysymmetric equilibrium and of the dominant mode (1,7) eigenfunction given by Newcomb’s equation, as in: P. Zanca and D. Terranova, Plasma Phys. Control. Fusion 46, 1115 (2004) poloidal flux
 and = (r,u), where u = m -n . In this case, it can be shown that B· =0, where the helical flux is defined as Thus, the contours of the helical flux give the shape of the flux surfaces. The SHEq code uses the helical flux obtained as superposition of an axysymmetric equilibrium and of the dominant mode (1,7) eigenfunction given by Newcomb’s equation, as in: P. Zanca and D. Terranova, Plasma Phys. Control. Fusion 46, 1115 (2004) poloidal flux.")
5
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Step 1: Axysymmetric equilibrium circular cross section Origin of cylindrical coordinates (torus axis) Vacuum vessel center Origin of “geometric” and “flux” coordinates GEOM. FLUX Shafranov shift Assuming circular flux surfaces, one defines “geometric” coordinates (r, , ) describing the shifted surfaces, and then redefines the poloidal angle, obtaining “flux” coordinates (r, f, ), i.e. straight field lines coordinates, through f = + (r, ). Equations are derived to compute F 0 (r), 0 (r) and (r), assuming a (r) profile given by the - 0 model.
 describing the shifted surfaces, and then redefines the poloidal angle, obtaining flux coordinates (r, f, ), i.e. straight field lines coordinates, through f = + (r, ). Equations are derived to compute F 0 (r), 0 (r) and (r), assuming a (r) profile given by the - 0 model..")
6
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Step 2: Newcomb’s equation solution Calculate amplitudes and phases of perturbed fluxes m,n and f m,n solving the first- order force balance equation J 1 B 0 + J 0 B 1 = 0. For each n, coupled equations for m = -1, 0, 1, 2 are obtained. The solution involves an unknown derivative discontinuity on resonant surfaces. Thus, it is required to impose both the B r and B harmonics at plasma edge, obtained from measurements. Notice that the perturbed fluxes, F(r, f, ) and (r, f, ), are not flux functions any more. However, for the Single Helicity case, = m -nF is a flux function. Include perturbations:
 and (r, f, ), are not flux functions any more. However, for the Single Helicity case, = m -nF is a flux function. Include perturbations:.")
7
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Example of flux surfaces computed by SHEq

8
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Example of mapping of T e and SXR over flux surfaces reproduced from: R. Lorenzini et al., Nature Phys. 5, 570 (2009) TeTe SXR emissivity
 TeTe SXR emissivity .")
9
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Helical coordinates for flux surface averaging P R Z RARA R Z ZAZA helical axis Helical coordinates: Toroidal angle Poloidal-like angle Helical flux (flux surface label) Coordinate origin on helical axis label flux surface angular variables Geometric relationship linking helical coordinates to cylindrical coordinates. NB: 3D Equilibrium We use as “radius” and define a new poloidal angle, , with respect to the new axis.

10
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Relating helical coordinates to cartesian ones Relate the Jacobian to that of the flux coordinates defined by Zanca and Terranova for the axisymmetric equilibrium >0 Result: Positive defined Jacobian In order to compute flux surface averages, we need to write the metric tensor elements of the new coordinate system, and in particular the Jacobian. Helical coordinate Jacobian Function remapped on the helical coordinates Average of a function F(x):
:.")
11
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Examples of flux surface averages We use as “radial” coordinate the square root of the normalized helical flux: (now in progress, change to poloidal flux, for better comparison with VMEC) B tor B pol J tor J pol
 B tor B pol J tor J pol")
12
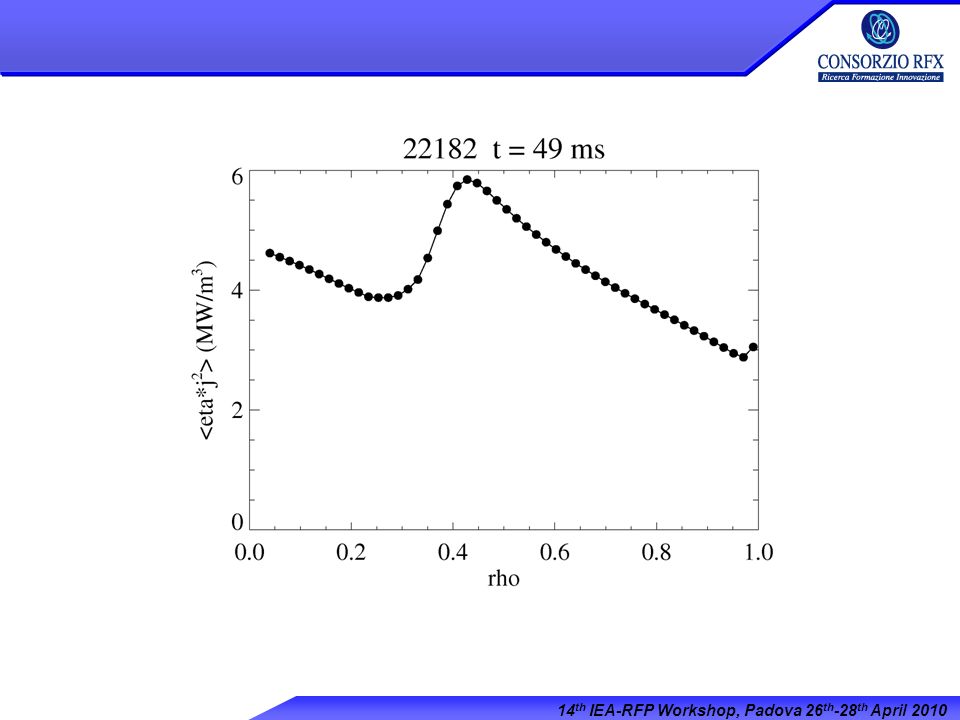
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Example: power balance g 11 element of metric tensor V’ g 11 and V’ are computed by SHEq and fed into ASTRA, which calculates the thermal conductivity. courtesy of Rita Lorenzini

13
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Safety factor The safety factor q is computed using the formal equivalence to Hamiltonian dynamics (method suggested by D. F. Escande). By substitution: We have now a “time-independent Hamiltonian” (F,u). Flux coordinates (straight field lines) in Hamiltonian language are action-angle coordinates. Compute action by averaging over constant- orbit: (new equivalence: H, F p, u q, t) The motion frequency in action-angle coordinates is: Taking into account the n-fold twisting of the helical axis, the actual rotational transform can be computed as: (equivalence: H, F p, f q, t)
. By substitution: We have now a time-independent Hamiltonian (F,u). Flux coordinates (straight field lines) in Hamiltonian language are action-angle coordinates. Compute action by averaging over constant- orbit: (new equivalence: H, F p, u q, t) The motion frequency in action-angle coordinates is: Taking into account the n-fold twisting of the helical axis, the actual rotational transform can be computed as: (equivalence: H, F p, f q, t).")
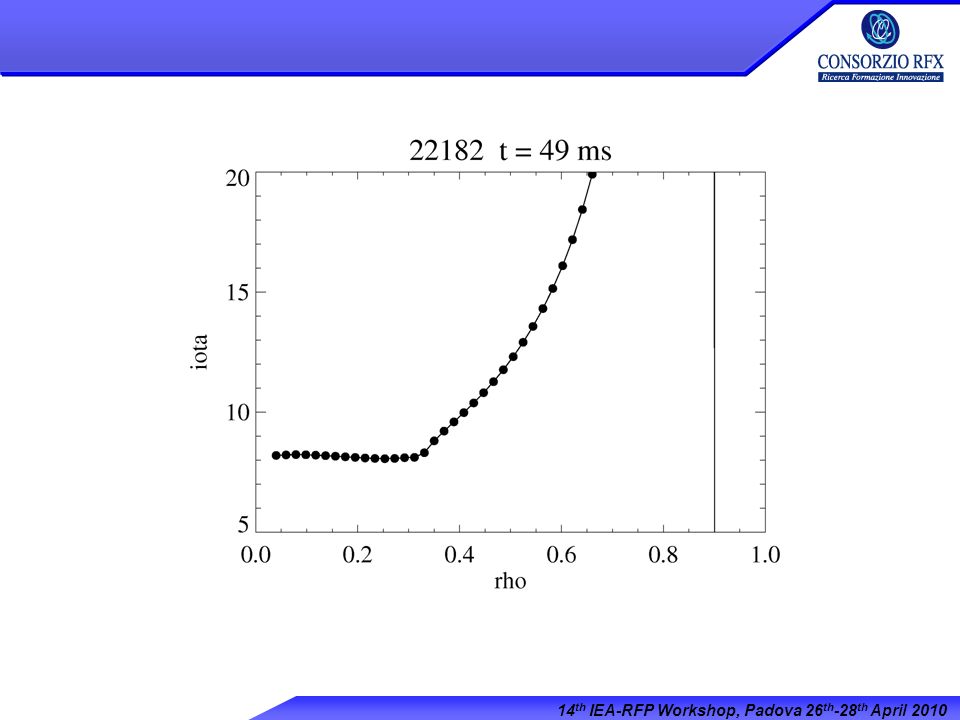
14
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Example of safety factor in SHAx states The safety factor takes an almost constant value around 1/8 inside the bean-shaped region, where the electron temperature is also flat.

15
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Ohmic constraint (many thanks to A. Boozer for useful discussions) In stationary conditions, the parallel Ohm’s law, E·B = j·B, gives where is the electrostatic potential and V t is the toroidal loop voltage. Flux-surface averaging removes the electrostatic term, so that The SHEq equilibria do not satisfy the Ohmic constraint. the ( , 0 ) model is not adequate. uniform Z eff profile
 In stationary conditions, the parallel Ohm’s law, E·B = j·B, gives where is the electrostatic potential and V t is the toroidal loop voltage. Flux-surface averaging removes the electrostatic term, so that The SHEq equilibria do not satisfy the Ohmic constraint. the ( , 0 ) model is not adequate. uniform Z eff profile.")
16
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 Outlook The SHEq code is operational for RFX-mod. It also provides input for VMEC calculations (at the moment essential to ensure VMEC convergence). Possible improvements include: Write output in format which can be read by other codes (DKES,....). Adapt profile, so as to reduce the discrepancy in Ohmic constraint. Better treatment of DAx cases (presently only flux surface plotting). More ambitiously, iteratively compute an ohmic equilibrium, which simultaneously satisfies force balance and parallel Ohm’s law. The use of SHEq on other RFP devices is encouraged (requires some adaptation, but we are eager to collaborate). A closer interaction with the stellarator community would also be important.
. Possible improvements include: Write output in format which can be read by other codes (DKES,....). Adapt profile, so as to reduce the discrepancy in Ohmic constraint. Better treatment of DAx cases (presently only flux surface plotting). More ambitiously, iteratively compute an ohmic equilibrium, which simultaneously satisfies force balance and parallel Ohm’s law. The use of SHEq on other RFP devices is encouraged (requires some adaptation, but we are eager to collaborate). A closer interaction with the stellarator community would also be important..")
17
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010 An off-topic slide Results from RFX-mod point to the need of providing the RFP configuration with a divertor. We have recently proposed to use the intrinsic m=0 islands to build, for a RFP operating in SHAx state, the equivalent of the “island divertor” used in stellarators. [E. Martines et al., Nucl. Fusion 50, 035014 (2010)] This is an issue to be considered when designing new experiments. Limiter-like conditionDivertor-like condition
] This is an issue to be considered when designing new experiments. Limiter-like conditionDivertor-like condition.")
18
14 th IEA-RFP Workshop, Padova 26 th -28 th April 2010

Similar presentations


, M.S.>")




p.martin Piero Martin Consorzio RFX- Associazione Euratom-ENEA sulla fusione, Padova, Italy Department of Physics,>")











