Download presentation
Presentation is loading. Please wait.

1
Downlink Traffic Scheduling in Green Vehicular Roadside Infrastructure
Abdulla A. Hammad Department of of Electrical and Computer Engineering McMaster University Hamilton, Ontario, CANADA

2
Outline Introduction Energy Efficient Downlink Scheduling
VBR scheduling CBR scheduling

3
VANET Applications

4
VANET Architecture V2V, V2I, hybrid and I2I communications
Roadside Unit (RSU) I2I V2V, V2I, hybrid and I2I communications Roadside Unit (RSU) is fixed infrastructure that enables vehicle-to-infrastructure (V2I) communications.
 I2I. V2V, V2I, hybrid and I2I communications. Roadside Unit (RSU) is fixed infrastructure that enables vehicle-to-infrastructure (V2I) communications.")
5
VANET overview Applications Architecture: OBU and RSU
Safety (e-brakes, accidents) Infotainment(VoD, file transfer, internet) Traffic (Monitoring, management) Architecture: OBU and RSU Difference from MANET Fast link disconnection Temporal and spatial changing traffic density Movement confined to road network Energy Limits RSU role Increase network connectivity Store delay tolerance contents Internet connectivity Safety: accidents and curvy road alerts
 Infotainment(VoD, file transfer, internet) Traffic (Monitoring, management) Architecture: OBU and RSU. Difference from MANET. Fast link disconnection. Temporal and spatial changing traffic density. Movement confined to road network. Energy Limits. RSU role. Increase network connectivity. Store delay tolerance contents. Internet connectivity. Safety: accidents and curvy road alerts.")
6
Green Vehicular Infrastructure?
S. Peirce and R. Mauri, “Vehicle-Infrastructure Integration (VII) Initiative: Benefit-Cost Analysis: Pre-Testing Estimates”, Intelligent Transportation Systems Joint Program Office, United States Department of Transportation, Washington, DC., March 30, 2007. Includes cost projections for an initial national vehicular infrastructure deployment (1B USD expenditure) 40% of all rural freeway roadside infrastructure would be solar powered. Unavailable power grid connectivity. over 63% of roadside unit costs consumed by solar provisioning costs, e.g., solar panel, battery and associated electronics. power savings ↑ energy provisioning cost ↓ Objective is to decrease energy use at the RSUs as aggressively as possible. How much energy can we save using energy aware downlink scheduling?
 Initiative: Benefit-Cost Analysis: Pre-Testing Estimates , Intelligent Transportation Systems Joint Program Office, United States Department of Transportation, Washington, DC., March 30, Includes cost projections for an initial national vehicular infrastructure deployment (1B USD expenditure) 40% of all rural freeway roadside infrastructure would be solar powered. Unavailable power grid connectivity. over 63% of roadside unit costs consumed by solar provisioning costs, e.g., solar panel, battery and associated electronics. power savings ↑ energy provisioning cost ↓ Objective is to decrease energy use at the RSUs as aggressively as possible. How much energy can we save using energy aware downlink scheduling")
7
V2I Roadside Unit (RSU) When a vehicle v arrives into RSU coverage, it communicates its Rv bit (delay tolerant) request. The RSU schedules its downlink response for some future time. Vehicles have unlimited energy reserves. RSU is energy constrained → focus on reducing downlink energy use.
 request. The RSU schedules its downlink response for some future time. Vehicles have unlimited energy reserves. RSU is energy constrained → focus on reducing downlink energy use.")
8
Air Interface Assumptions
Constant bit rate (CBR) Power control is used to adapt to channel conditions. Packet or slot based Schedulers try to minimize the downlink transmission energy needed to process vehicle requests.
 Power control is used to adapt to channel conditions. Packet or slot based. Schedulers try to minimize the downlink transmission energy needed to process vehicle requests.")
9
Air Interface Assumptions
Variable bit rate (VBR) fixed transmit power. The bit rate is adapted to channel conditions. Fixed size packet lengths at different bit rates Schedulers try to minimize the amount of downlink transmission time required to process vehicle requests.
 fixed transmit power. The bit rate is adapted to channel conditions. Fixed size packet lengths at different bit rates. Schedulers try to minimize the amount of downlink transmission time required to process vehicle requests.")
10
Delay-Tolerant CBR Example
(Distance dependent exponential path loss, e.g., α = 3) For example: Choice of Vehicle i communication time, e.g., t2 vs t1. Huge energy savings when communicating over shorter distances. Requires delay tolerance! Requires energy cost estimates.
 For example: Choice of Vehicle i communication time, e.g., t2 vs t1. Huge energy savings when communicating over shorter distances. Requires delay tolerance! Requires energy cost estimates.")
11
Another Example Vehicle w is moving away from energy favourable locations. Vehicle v is moving towards energy favourable locations. Therefore, we should serve Vehicle w first!

12
Another Example How to schedule when there are different vehicular speeds and communication requirements? It seems that faster moving vehicles with higher communication requirements should be given scheduling priority.

13
Part 1: Variable Transmission Power - CBR
Model Assumptions Vehicles can store (buffer) stream more than it needs currently No vehicle to vehicle communication RSUs coverage do not overlap BW is velocity independent
 stream more than it needs currently. No vehicle to vehicle communication. RSUs coverage do not overlap. BW is velocity independent.")
14
Mixed Integer Linear Program Formulation
Offline Energy Bounds Packet-Based Scheduling: Modeled as single machine scheduling with deadlines NP hard Timeslot-Based Scheduling Mixed Integer Linear Program Formulation

15
Minimum Cost Flow Graph Formulation

16
Online Time slot-based Algorithms
Greedy Minimum Cost Flow (GMCF) Event driven Network Flow formed and Minimum Cost computed Seeks global minima for all vehicles in range High computation cost Static Scheduler (SS) Seeks local minima for all vehicles in range Two phases: weight computation, scheduling Weight computation: happens once, based on preferred time slots Scheduling rule: static, based on highest weight first Average computation cost Weakness: bad performance under high variation in speed Nearest Fastest Set (NFS) Scheduler Event driven, preferred slots selected upon arrival Scheduling:dynamic: only resolves contention when they actually happen Strength: Low computation cost, handles high variation in speed Weakness: High energy cost, due to delayed contention resolution
 Event driven. Network Flow formed and Minimum Cost computed. Seeks global minima for all vehicles in range. High computation cost. Static Scheduler (SS) Seeks local minima for all vehicles in range. Two phases: weight computation, scheduling. Weight computation: happens once, based on preferred time slots. Scheduling rule: static, based on highest weight first. Average computation cost. Weakness: bad performance under high variation in speed. Nearest Fastest Set (NFS) Scheduler. Event driven, preferred slots selected upon arrival. Scheduling:dynamic: only resolves contention when they actually happen. Strength: Low computation cost, handles high variation in speed. Weakness: High energy cost, due to delayed contention resolution.")
17
Performance Evaluation
Two sets of results Best case scenario: accurate prediction of speed and position based on deterministic path loss scenario Average case scenario: including shadowing effect (minimal in HW environment because of LoS) Traffic Model Difference between urban and HW environment Tendency to maintain speed Lane speed limits (different speed classes) Arrival model: Poisson Distribution Traffic direction
 Traffic Model. Difference between urban and HW environment. Tendency to maintain speed. Lane speed limits (different speed classes) Arrival model: Poisson Distribution. Traffic direction.")
18
Performance Evaluation
Effect of speed Two Classes: 18m/s 18,23,28,33 m/s No shadowing Light and medium load arrival rate:1/22 v/s Light Load: GMCF close to Bound SS More energy Less comp. intensive

19
Effect of demand No shadow 3 Classes Fig.7: same speed Fig.8:18,24,33 m/s

20
Shadowing: 4,12 dB vs increasing demand

21
Platooning Fig.12: same speed Fig.13: Three different speeds

22
Publications AA Hammad, GH Badawy, TD Todd, AA Sayegh, D Zhao, IEEE Global Telecommunications Conference (GLOBECOM 2010) Hammad, A.A.; Todd, T.D.; Karakostas, G.; Dongmei Zhao, "Downlink Traffic Scheduling in Green Vehicular Roadside Infrastructure," IEEE Transactions on Vehicular Technology

23
Part2: Variable Bit-rate
Model Assumptions RSU with Constant Transmission power Limited, non-overlapping coverage area RSU battery powered with renewable power source Highway environment traffic (constant velocity and platooning) Vehicle announce requirement, velocity and location upon arrival Vehicle demand can be satisfied by different combinations of time slots between which the received bit rate can be differ. The objective is to minimize the number of time slots during which the AP is transmitting, while satisfying all vehicle demands.
 Vehicle announce requirement, velocity and location upon arrival. Vehicle demand can be satisfied by different combinations of time slots between which the received bit rate can be differ. The objective is to minimize the number of time slots during which the AP is transmitting, while satisfying all vehicle demands.")
24
Integer Programming Model

25
Analysis of VBR Scheduling Problem

27
Problem Relaxation Relaxation can be done by relaxing the binary condition. Problem: unbounded Integrality gap Solver can assign 1 time slot to m vehicles each assigned 1/m of the slot

28
Offline Energy Bounds Generalized Flow Graph
Dynamic Network Topology Graph

29
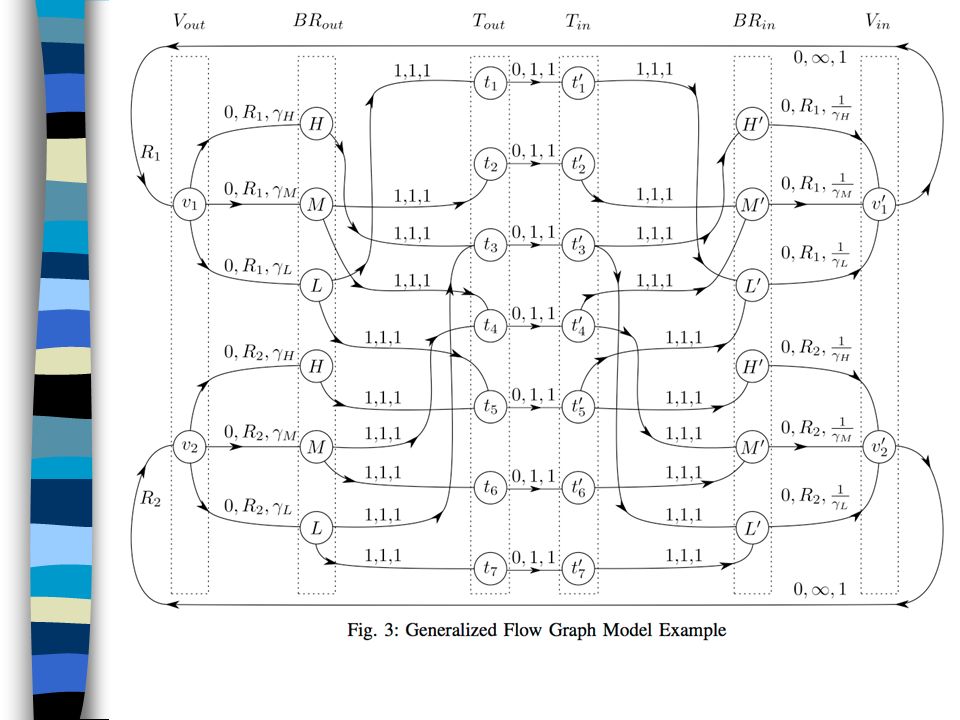
Generalized Flow Graph
Fast computations based on special combinatorial algorithms Ease of approximation to integral solution due to high percentage of flows are integers

31
Dynamic Network Topology Graph
GF drawbacks: Time slots inversely proportional to velocity Depending on slot size: large period of times may encounter no bit rate change. DNTG: includes time in model

32
DNTG: Time Expanded Graph

33
Online Scheduling Algorithms
Bounds provide theoretical optimum energy usage (but assumes future arrivals knowledge) Online Scheduling Algorithms FCFS Fastest First Greedy GF Algorithm Greedy DNTG Algorithm
 Online Scheduling Algorithms. FCFS. Fastest First. Greedy GF Algorithm. Greedy DNTG Algorithm.")
34
FCFS First Come First Serve
Vehicles are assigned best possible time slots if they were not reserved for earlier arriving vehicles Static Assignment: no decision revoking Simple to implement Fairness questionable

36
Fastest First Algorithm
Faster moving vehicle spend less time inside the RSU range than slower ones. To increase fairness, faster vehicles are assigned slots prior to slower ones. Not static: decisions can be revoked.

38
Greedy GF Algorithm Use GF design used to calculate the Bound
No future knowledge of arrival Event based: activates upon vehicle arrival Integer approximation upon execution

39
Greedy GF Algorithm

40
Greedy DNTG Algorithm Greedy Implementation of the Dynamic Network Topology Graph Event-based: triggered upon arrival of new vehicles Outline similar to Greedy GF Algorithm outlined before

41
Performance Comparison
Highway environment Vehicles maintain velocity/platoon Poisson Arrival Vehicles announce velocity,location and requirements Dropping is allowed Deterministic exponential path-loss and Log-normal shadowing component

42
Throughput (no shadowing random component)
Two classes of vehicles (18, 30 m/s) Arrival rate 1/28 v/s Platoon 10% No Dropping
 Arrival rate 1/28 v/s. Platoon 10% No Dropping.")
43
Demand Drop

44
Online algorithms under high demand
Two classes: 18, 30 m/s Platooning 10% Arr.rate: 1/30 v/s Throughput saturates

45
Dropping under high demand

46
Energy vs Speed

47
Shadowing: throughput

48
Shadowing: Dropping

49
Jain’s Fairness Index As dropping is allowed, fairness across algorithms needs to be measured

50
Jain’s Fairness Index

51
Thank you

Similar presentations












 Shen* *BroadBand Communication Research.>")









