Download presentation
Presentation is loading. Please wait.

1
Computational Photography lecture 5 – filtering and frequencies CS 590 Spring 2014 Prof. Alex Berg (Credits to many other folks on individual slides)
.")
2
Thanks for the assignments! I will post links later today. Please look over each other’s work and send me a vote for your favorite {assignment, specific image} with at least a sentence about why. Today filtering and frequency analysis of images. Next week, guest lecturer! Prof. Marc Niethammer, an expert in medical image analysis. Another chance to see how to get to know the pixels. I will be at a conference – the European Conference on Computer Vision (ECCV) presenting some research, but will be thinking of you all, will be on email, and will hold office hours over google hangouts (alex.c.berg) during the same after-class time, or will announce alternatives. Today
 presenting some research, but will be thinking of you all, will be on , and will hold office hours over google hangouts (alex.c.berg) during the same after-class time, or will announce alternatives. Today.")
3
Slides from Derek Hoiem

4
Sampling and Reconstruction

5
© 2006 Steve Marschner 5 Sampled representations How to store and compute with continuous functions? Common scheme for representation: samples –write down the function’s values at many points [FvDFH fig.14.14b / Wolberg]

6
© 2006 Steve Marschner 6 Reconstruction Making samples back into a continuous function –for output (need realizable method) –for analysis or processing (need mathematical method) –amounts to “guessing” what the function did in between [FvDFH fig.14.14b / Wolberg]
![© 2006 Steve Marschner 6 Reconstruction Making samples back into a continuous function –for output (need realizable method) –for analysis or processing (need mathematical method) –amounts to guessing what the function did in between [FvDFH fig.14.14b / Wolberg]](http://images.slideplayer.com/21/6242290/slides/slide_6.jpg "© 2006 Steve Marschner 6 Reconstruction Making samples back into a continuous function –for output (need realizable method) –for analysis or processing (need mathematical method) –amounts to guessing what the function did in between [FvDFH fig.14.14b / Wolberg]")
7
1D Example: Audio lowhigh frequencies

8
© 2006 Steve Marschner 8 Sampling in digital audio Recording: sound to analog to samples to disc Playback: disc to samples to analog to sound again –how can we be sure we are filling in the gaps correctly?

9
© 2006 Steve Marschner 9 Sampling and Reconstruction Simple example: a sign wave

10
© 2006 Steve Marschner 10 Undersampling What if we “missed” things between the samples? Simple example: undersampling a sine wave –unsurprising result: information is lost

11
© 2006 Steve Marschner 11 Undersampling What if we “missed” things between the samples? Simple example: undersampling a sine wave –unsurprising result: information is lost –surprising result: indistinguishable from lower frequency

12
© 2006 Steve Marschner 12 Undersampling What if we “missed” things between the samples? Simple example: undersampling a sine wave –unsurprising result: information is lost –surprising result: indistinguishable from lower frequency –also, was always indistinguishable from higher frequencies –aliasing: signals “traveling in disguise” as other frequencies

13
Aliasing in video Slide by Steve Seitz

14
Aliasing in images

15
What’s happening? Input signal: x = 0:.05:5; imagesc(sin((2.^x).*x)) Plot as image: Alias! Not enough samples

16
Antialiasing What can we do about aliasing? Sample more often –Join the Mega-Pixel craze of the photo industry –But this can’t go on forever Make the signal less “wiggly” –Get rid of some high frequencies –Will loose information –But it’s better than aliasing

17
© 2006 Steve Marschner 17 Preventing aliasing Introduce lowpass filters: –remove high frequencies leaving only safe, low frequencies –choose lowest frequency in reconstruction (disambiguate)
")
18
© 2006 Steve Marschner 18 Linear filtering: a key idea Transformations on signals; e.g.: –bass/treble controls on stereo –blurring/sharpening operations in image editing –smoothing/noise reduction in tracking Key properties –linearity: filter(f + g) = filter(f) + filter(g) –shift invariance: behavior invariant to shifting the input delaying an audio signal sliding an image around Can be modeled mathematically by convolution
 = filter(f) + filter(g) –shift invariance: behavior invariant to shifting the input delaying an audio signal sliding an image around Can be modeled mathematically by convolution")
19
© 2006 Steve Marschner 19 Moving Average basic idea: define a new function by averaging over a sliding window a simple example to start off: smoothing

20
© 2006 Steve Marschner 20 Weighted Moving Average Can add weights to our moving average Weights […, 0, 1, 1, 1, 1, 1, 0, …] / 5
![© 2006 Steve Marschner 20 Weighted Moving Average Can add weights to our moving average Weights […, 0, 1, 1, 1, 1, 1, 0, …] / 5](http://images.slideplayer.com/21/6242290/slides/slide_20.jpg "© 2006 Steve Marschner 20 Weighted Moving Average Can add weights to our moving average Weights […, 0, 1, 1, 1, 1, 1, 0, …] / 5")
21
© 2006 Steve Marschner 21 Weighted Moving Average bell curve (gaussian-like) weights […, 1, 4, 6, 4, 1, …]
![© 2006 Steve Marschner 21 Weighted Moving Average bell curve (gaussian-like) weights […, 1, 4, 6, 4, 1, …]](http://images.slideplayer.com/21/6242290/slides/slide_21.jpg "© 2006 Steve Marschner 21 Weighted Moving Average bell curve (gaussian-like) weights […, 1, 4, 6, 4, 1, …]")
22
© 2006 Steve Marschner 22 Moving Average In 2D What are the weights H? 0000000000 0000000000 00090 00 000 00 000 00 000 0 00 000 00 0000000000 00 0000000 0000000000 Slide by Steve Seitz

23
© 2006 Steve Marschner 23 Cross-correlation filtering Let’s write this down as an equation. Assume the averaging window is (2k+1)x(2k+1): We can generalize this idea by allowing different weights for different neighboring pixels: This is called a cross-correlation operation and written: H is called the “filter,” “kernel,” or “mask.” Slide by Steve Seitz
x(2k+1): We can generalize this idea by allowing different weights for different neighboring pixels: This is called a cross-correlation operation and written: H is called the filter, kernel, or mask. Slide by Steve Seitz.")
24
Gaussian filtering A Gaussian kernel gives less weight to pixels further from the center of the window This kernel is an approximation of a Gaussian function: 0000000000 0000000000 00090 00 000 00 000 00 000 0 00 000 00 0000000000 00 0000000 0000000000 121 242 121 Slide by Steve Seitz

25
Mean vs. Gaussian filtering Slide by Steve Seitz

26
Convolution cross-correlation: A convolution operation is a cross-correlation where the filter is flipped both horizontally and vertically before being applied to the image: It is written: Suppose H is a Gaussian or mean kernel. How does convolution differ from cross-correlation? Slide by Steve Seitz

27
© 2006 Steve Marschner 27 Convolution is nice! Notation: Convolution is a multiplication-like operation –commutative –associative –distributes over addition –scalars factor out –identity: unit impulse e = […, 0, 0, 1, 0, 0, …] Conceptually no distinction between filter and signal Usefulness of associativity –often apply several filters one after another: (((a * b 1 ) * b 2 ) * b 3 ) –this is equivalent to applying one filter: a * (b 1 * b 2 * b 3 )
 * b 2 ) * b 3 ) –this is equivalent to applying one filter: a * (b 1 * b 2 * b 3 ).")
28
Tricks with convolutions =

29
Slides from Alexei Eros and Steve Seitz

30
Salvador Dali, “Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln”, 1976 Salvador Dali “Gala Contemplating the Mediterranean Sea, which at 30 meters becomes the portrait of Abraham Lincoln”, 1976

33
A nice set of basis This change of basis has a special name… Teases away fast vs. slow changes in the image.

34
Jean Baptiste Joseph Fourier (1768-1830) had crazy idea (1807): Any univariate function can be rewritten as a weighted sum of sines and cosines of different frequencies. Don’t believe it? –Neither did Lagrange, Laplace, Poisson and other big wigs –Not translated into English until 1878! But it’s (mostly) true! –called Fourier Series –there are some subtle restrictions...the manner in which the author arrives at these equations is not exempt of difficulties and...his analysis to integrate them still leaves something to be desired on the score of generality and even rigour. Laplace Lagrange Legendre
 true. –called Fourier Series –there are some subtle restrictions...the manner in which the author arrives at these equations is not exempt of difficulties and...his analysis to integrate them still leaves something to be desired on the score of generality and even rigour. Laplace Lagrange Legendre.")
35
A sum of sines Our building block: Add enough of them to get any signal f(x) you want! How many degrees of freedom? What does each control? Which one encodes the coarse vs. fine structure of the signal?

36
Fourier Transform We want to understand the frequency of our signal. So, let’s reparametrize the signal by instead of x: f(x) F( ) Fourier Transform F( ) f(x) Inverse Fourier Transform For every from 0 to inf, F( ) holds the amplitude A and phase of the corresponding sine How can F hold both? Complex number trick! We can always go back:
 F( ) Fourier Transform F( ) f(x) Inverse Fourier Transform For every from 0 to inf, F( ) holds the amplitude A and phase of the corresponding sine How can F hold both. Complex number trick. We can always go back:.")
37
Time and Frequency example : g(t) = sin(2pf t) + (1/3)sin(2p(3f) t)
 = sin(2pf t) + (1/3)sin(2p(3f) t)")
38
Time and Frequency example : g(t) = sin(2pf t) + (1/3)sin(2p(3f) t) = +
 = sin(2pf t) + (1/3)sin(2p(3f) t) = +")
39
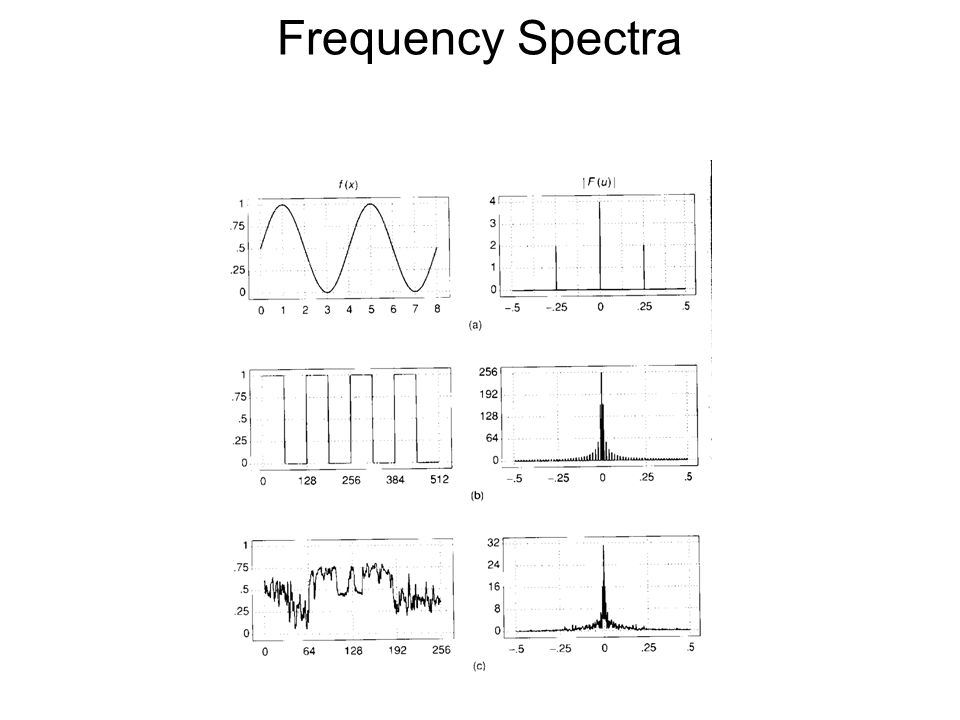
Frequency Spectra example : g(t) = sin(2pf t) + (1/3)sin(2p(3f) t) = +
 = sin(2pf t) + (1/3)sin(2p(3f) t) = +")
40
Frequency Spectra Usually, frequency is more interesting than the phase

41
= + = Frequency Spectra

42
= + =

43
= + =

44
= + =

45
= + =

46
=

48
FT: Just a change of basis...... * = M * f(x) = F( )
 = F( )")
49
IFT: Just a change of basis...... * = M -1 * F( ) = f(x)
 = f(x)")
50
Finally: Scary Math

51
…not really scary: is hiding our old friend: So it’s just our signal f(x) times sine at frequency phase can be encoded by sin/cos pair
 times sine at frequency phase can be encoded by sin/cos pair")
52
Extension to 2D in Matlab, check out: imagesc(log(abs(fftshift(fft2(im)))));
))));")
53
Fourier analysis in images Intensity Image Fourier Image http://sharp.bu.edu/~slehar/fourier/fourier.html#filtering

54
Signals can be composed += http://sharp.bu.edu/~slehar/fourier/fourier.html#filtering More: http://www.cs.unm.edu/~brayer/vision/fourier.html

55
Man-made Scene

56
Can change spectrum, then reconstruct

57
Low and High Pass filtering

58
The Convolution Theorem The greatest thing since sliced (banana) bread! –The Fourier transform of the convolution of two functions is the product of their Fourier transforms –The inverse Fourier transform of the product of two Fourier transforms is the convolution of the two inverse Fourier transforms –Convolution in spatial domain is equivalent to multiplication in frequency domain!

59
2D convolution theorem example * f(x,y)f(x,y) h(x,y)h(x,y) g(x,y)g(x,y) |F(s x,s y )| |H(s x,s y )| |G(s x,s y )|
f(x,y) h(x,y)h(x,y) g(x,y)g(x,y) |F(s x,s y )| |H(s x,s y )| |G(s x,s y )|")
60
Why does the Gaussian give a nice smooth image, but the square filter give edgy artifacts? GaussianBox filter Filtering

61
Gaussian

62
Box Filter

63
Fourier Transform pairs

64
Low-pass, Band-pass, High-pass filters low-pass: High-pass / band-pass:

65
Edges in images

66
What does blurring take away? original

67
What does blurring take away? smoothed (5x5 Gaussian)
")
68
High-Pass filter smoothed – original

69
Band-pass filtering Laplacian Pyramid (subband images) Created from Gaussian pyramid by subtraction Gaussian Pyramid (low-pass images)
 Created from Gaussian pyramid by subtraction Gaussian Pyramid (low-pass images)")
70
Laplacian Pyramid How can we reconstruct (collapse) this pyramid into the original image? Need this! Original image

71
Why Laplacian? Laplacian of Gaussian Gaussian delta function

72
Project 2: Hybrid Images http://www.cs.illinois.edu/class/fa10/cs498dwh/projects/hybrid/ComputationalPhotography_ProjectHyb rid.html Gaussian Filter! Laplacian Filter! Project Instructions: A. Oliva, A. Torralba, P.G. Schyns, “Hybrid Images,” SIGGRAPH 2006 “Hybrid Images,” Gaussian unit impulse Laplacian of Gaussian

73
Early processing in humans filters for various orientations and scales of frequency Perceptual cues in the mid frequencies dominate perception When we see an image from far away, we are effectively subsampling it Early Visual Processing: Multi-scale edge and blob filters Clues from Human Perception

74
Frequency Domain and Perception Campbell-Robson contrast sensitivity curve

75
Da Vinci and Peripheral Vision

76
Leonardo playing with peripheral vision

77
Unsharp Masking - = = +

78
Freq. Perception Depends on Color R GB

79
Lossy Image Compression (JPEG) Block-based Discrete Cosine Transform (DCT)
 Block-based Discrete Cosine Transform (DCT)")
80
Using DCT in JPEG The first coefficient B(0,0) is the DC component, the average intensity The top-left coeffs represent low frequencies, the bottom right – high frequencies
 is the DC component, the average intensity The top-left coeffs represent low frequencies, the bottom right – high frequencies")
81
Image compression using DCT Quantize –More coarsely for high frequencies (which also tend to have smaller values) –Many quantized high frequency values will be zero Encode –Can decode with inverse dct Quantization table Filter responses Quantized values
 –Many quantized high frequency values will be zero Encode –Can decode with inverse dct Quantization table Filter responses Quantized values")
82
JPEG Compression Summary Subsample color by factor of 2 –People have bad resolution for color Split into blocks (8x8, typically), subtract 128 For each block a.Compute DCT coefficients for b.Coarsely quantize Many high frequency components will become zero c.Encode (e.g., with Huffman coding) http://en.wikipedia.org/wiki/YCbCr http://en.wikipedia.org/wiki/JPEG
, subtract 128 For each block a.Compute DCT coefficients for b.Coarsely quantize Many high frequency components will become zero c.Encode (e.g., with Huffman coding)")
83
Block size in JPEG Block size –small block faster correlation exists between neighboring pixels –large block better compression in smooth regions –It’s 8x8 in standard JPEG

84
JPEG compression comparison 89k12k

85
Image gradient The gradient of an image: The gradient points in the direction of most rapid change in intensity The gradient direction is given by: how does this relate to the direction of the edge? The edge strength is given by the gradient magnitude

86
Effects of noise Consider a single row or column of the image –Plotting intensity as a function of position gives a signal Where is the edge? How to compute a derivative?

87
Where is the edge? Solution: smooth first Look for peaks in

88
Derivative theorem of convolution This saves us one operation:

89
Laplacian of Gaussian Consider Laplacian of Gaussian operator Where is the edge? Zero-crossings of bottom graph

90
2D edge detection filters is the Laplacian operator: Laplacian of Gaussian Gaussianderivative of Gaussian

91
Try this in MATLAB g = fspecial('gaussian',15,2); imagesc(g); colormap(gray); surfl(g) gclown = conv2(clown,g,'same'); imagesc(conv2(clown,[-1 1],'same')); imagesc(conv2(gclown,[-1 1],'same')); dx = conv2(g,[-1 1],'same'); imagesc(conv2(clown,dx,'same')); lg = fspecial('log',15,2); lclown = conv2(clown,lg,'same'); imagesc(lclown) imagesc(clown +.2*lclown) Find your own image, clown doesn’t seem to be a default image anymore
![Try this in MATLAB g = fspecial( gaussian ,15,2); imagesc(g); colormap(gray); surfl(g) gclown = conv2(clown,g, same ); imagesc(conv2(clown,[-1 1], same )); imagesc(conv2(gclown,[-1 1], same )); dx = conv2(g,[-1 1], same ); imagesc(conv2(clown,dx, same )); lg = fspecial( log ,15,2); lclown = conv2(clown,lg, same ); imagesc(lclown) imagesc(clown +.2*lclown) Find your own image, clown doesn’t seem to be a default image anymore ](http://images.slideplayer.com/21/6242290/slides/slide_91.jpg "Try this in MATLAB g = fspecial( gaussian ,15,2); imagesc(g); colormap(gray); surfl(g) gclown = conv2(clown,g, same ); imagesc(conv2(clown,[-1 1], same )); imagesc(conv2(gclown,[-1 1], same )); dx = conv2(g,[-1 1], same ); imagesc(conv2(clown,dx, same )); lg = fspecial( log ,15,2); lclown = conv2(clown,lg, same ); imagesc(lclown) imagesc(clown +.2*lclown) Find your own image, clown doesn’t seem to be a default image anymore ")
92
For next class I will send out a pointer to the links to look at other folks’ assignment 1s. Please look over these and send me your votes for best {assignment, image} with 1-2 sentence comments. Prof. Marc Niethammer will talk more about finding edges and regions of images next week. I will put the next assignment online soon – image compositing with variations. It will be due September 18. In the meantime, please experiment with the matlab from the lecture slides. One of the class goals is to get familiar with manipulating images!

Similar presentations












 Images by Pawan SinhaPawan Sinha formal terminology.>")






