Download presentation
Presentation is loading. Please wait.

1
Limit Cycle Isolated closed trajectories Analysis is, in general, quite difficult. For nonlinear systems, two simple results exist. Limit Cycle 2 - 1

2
Bendixson’s Theorem B A Connected (but not simple set) (angular region) # 2 - 2
 (angular region) # 2 - 2")
3
Ex: 2 - 3

4
Poincare-Bendixson Theorem positive limit set Negative limit set exists. Positive limit set does not. 2 - 4

5
Theorem 2 - 5

6
Example for Poincare-Bendixson Theorem Ex : 2 - 6

7
Index Theorem Index Theorem 2 - 7

8
Facts Isolated Equilibrium +1 2 - 8

9
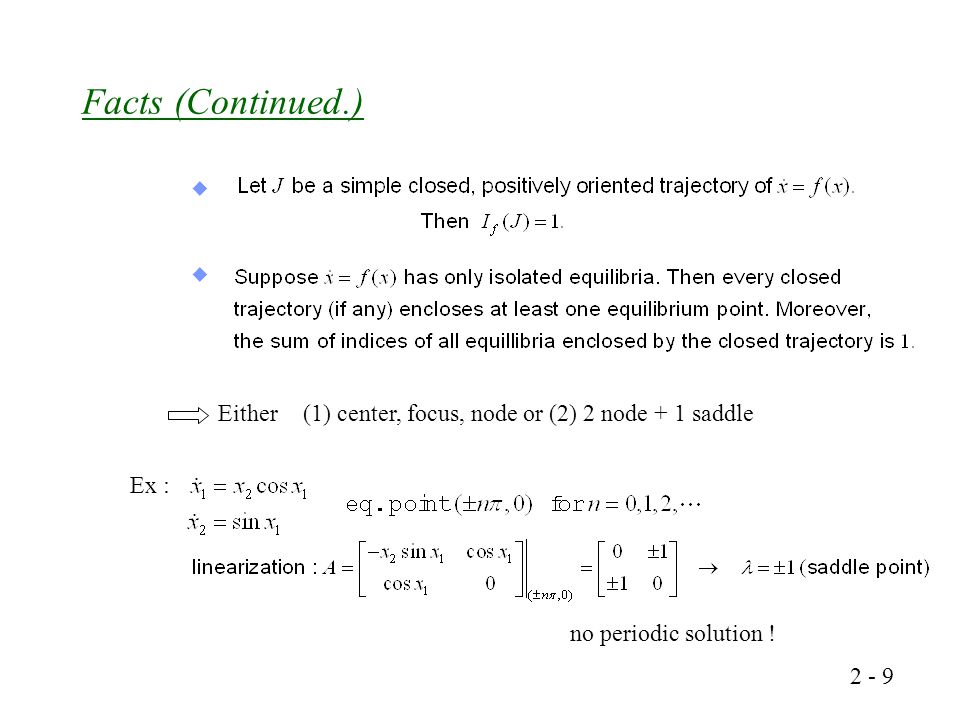
Facts (Continued.) Either(1) center, focus, node or (2) 2 node + 1 saddle Ex : no periodic solution ! 2 - 9
10
Volterra predator – prey model Ex: eq) saddle center 2 - 10
 saddle center")
11
Introduction and motivation 3. Mathematical Foundations existence, uniqueness, continuously dependent on initial conditions or Obviously, we can write (for simplicity, we assume a time invariant case) To analyze the fundamental properties, use the simple idea of successive approximations : Choose the initial approximation not initial condition but the initial approximation 2 - 11
 To analyze the fundamental properties, use the simple idea of successive approximations : Choose the initial approximation not initial condition but the initial approximation")
12
Introduction and motivation Then, we can write first approximation In general, So, the procedure generates the sequence Questions: 2 - 12

13
Introduction (Continued) The idea to provide the answers is quite simple. We write again, Then we can write Processing this and analogous inequalities, one can arrive at the conclusions of existence, uniqueness, etc. 2 - 13

14
Introduction (Continued) The modern approach to the problem is based on a more general principle, useful for many other applications – the contraction mapping theorem (functional analysis technique). Introduce an operator T Define T as follows : Then, the recursion has the form 2 - 14

15
Introduction and motivation It is possible to show that under the Lipschitz condition, T has a fixed point which says that x is a solution. It is also possible to find conditions under which this fixed point is unique. To develop, more or less carefully, the machinery for such a proof we need several metrics : Linear SpaceNorm Linear Normed Space += Set of elements closed w.r.t. addition and multiplication by a scalar Measure of distance between two elements (after generated by the projection -inner product of elements - ) Inner Product Inner Product Space = 2 - 15
 Inner Product Inner Product Space =")
16
Introduction (Continued) Complete linear normed space Complete linear normed space Operator T every convergent sequence has the limit in this set 2 - 16
 Complete linear normed space Complete linear normed space Operator T every convergent sequence has the limit in this set")
17
Preliminaries Preliminaries (real number) Norm real valued function of x such that P-norm 2 - 17
 Norm real valued function of x such that P-norm")
18
Preliminaries(continued) Most used norms Euclidean norm (Example) (proof) All finite dimensional norms are equivalent. 2 - 18

19
Preliminaries(continued) matrix norm For instance, (max column sum)(max row sum) 2 - 19
 matrix norm For instance, (max column sum)(max row sum)")
20
Preliminaries(continued) Then 2 - 20
 Then")
21
Linear infinite dimensional (function) spaces Preliminaries(continued) 2 - 21
 spaces Preliminaries(continued)")
22
Preliminaries(Examples) 2 - 22
")
23
Preliminaries(Examples) 2 - 23
")
24
Cauchy Sequence 2 - 24

25
Cauchy Sequence(Examples) Ex : Solution : 2 - 25
 Ex : Solution :")
26
Cauchy Sequence(Examples) 2 - 26
")
27
Cauchy Sequence(Examples) (sol.) 2 - 27
 (sol.)")
28
Cauchy Sequence(Examples) 2 - 28
")
29
Cauchy Sequence(Examples) Ex : 2 - 29
 Ex :")
30
Banach Space 2 - 30

31
Banach Space(continued) 2 - 31
")
32
Banach Space(continued) 2 - 32
 ")
33
Contraction Mapping Contraction Mapping not necessarily linear 2 - 33

34
Proof : 2 - 34

35
2 – 35

36
Banach Space(Examples) Ex : 2 – 36
 Ex : 2 – 36")
37
Local Contraction mapping theorem Proof : same as before. 2 - 37

Similar presentations



>")


 Week 13 Universitas Multimedia Nusantara Serpong, Tangerang Dr. Ananda Kusuma>")






. 1. Motivation For those participants wondering why we start a course dedicated to nonlinear problems by.>")





