Download presentation
Presentation is loading. Please wait.

1
Improved Interfaces for Human-Robot Interaction in Urban Search and Rescue Michael Baker Robert Casey Brenden Keyes Holly A. Yanco University of Massachusetts Lowell

2
Why Human-Robot Interaction in Urban Search and Rescue is Hard Important to avoid secondary collapse by navigating safely “Tunnel vision” view of the environment Easy to miss vital information and details No sense of scale, travel direction or color Video courtesy of CRASAR

3
Human-Robot Interaction Issues in Urban Search and Rescue Usability studies show: – Users spend a lot of time trying to gain situation awareness – 30% of run time spent looking around instead of navigating – Most users focus only on the video display We are looking to create an interface, that will be simple yet robust.

4
Problems with Existing Interfaces Designed for more than one task GUI shows extraneous information Sensor information is too spread out Large learning curve Not configurable

5
Problems with Existing Interfaces Wasted real estate Sonar map is difficult to read Map is not on the same eye level.

6
Our Approach Capitalize on the user’s natural area of focus Fuse sensor information to decrease cognitive load – Present sensor information so it’s readily and easily understood – Increase situation awareness while decreasing the user’s mental effort Enhancements to increase user efficiency – Suggestions – Additional sensors

7
UMass Lowell’s USAR Interface

8
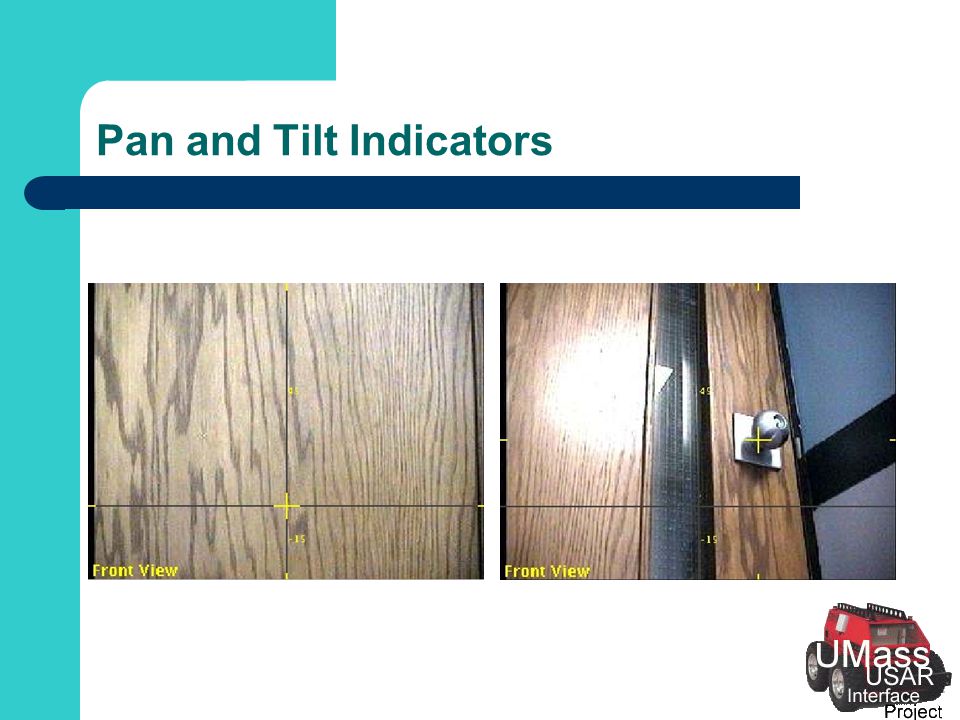
Pan and Tilt Indicators

10
Single Camera Problems User has to remember what is behind the robot Leads to Problems – 41% rear hits – Poor situation awareness behind the robot

11
Two Camera Solution “Rear view mirror”-inspired video display Automatic remapping of drive commands to simplify navigation Automatic remapping of range information to match robot travel direction

12
Ranging Information Ranging information is displayed around the video – Takes advantage of the user’s natural area of focus Use color, number of bars and location to lessen the user’s cognitive effort Option to display raw distance values

13
Ranging Information Ranging information is displayed around the video – Takes advantage of the user’s natural area of focus Use color, number of bars and location to lessen the user’s cognitive effort Option to display raw distance values

14
Map of the Environment

15
Preliminary Tests Users liked ability to switch the camera view Users prefer the joystick over the keyboard control Suggestions were helpful Usability tests in progress

16
Ongoing Work Customizations – People interact with the same interface differently – Reflect user’s preference, not developer’s Use layered sensor modalities Variable frame rates for front and rear camera

17
UMass Lowell USAR Interface

Similar presentations





 Presented by Misha Kostandov.>")



 Prof. Garzotto.>")









