Download presentation
Presentation is loading. Please wait.

1
Engineering Systems Shuvra Das University of Detroit Mercy

2
Summary Engineering systems Approach to analyze systems System components Types of systems System equations System responses

3
Flowchart of Mechatronic Systems

4
Relevant questions: Systems! A motor is switched on: “How will the rotation of the shaft vary with time?” A hydraulic system opens a valve to allow a liquid to flow into a tank: “How will the water level vary with time?” A crash has occurred: “How fast will the airbag system deploy?” To answer these questions an understanding of the system behavior is necessary.

5
Engineering System A system consists of multiple components that work together to perform a task. Although a system may be made of many components it can be represented as a “black-box” with an input and an output. – temperature measuring system, – transmission system –hydraulic system, –lighting system,heating system –suspension system, etc.

6
Examples

7
Stages of Dynamic System Investigation Physical Modeling –Imagine a simple physical model that will match closely the behavior of the system Equations of Motion –Develop Mathematical Model to describe the physical model Dynamic Behavior –Study the dynamic behavior of the physical model Design Decisions –choose physical parameters of the system such that it will behave as desired

8
Example

10
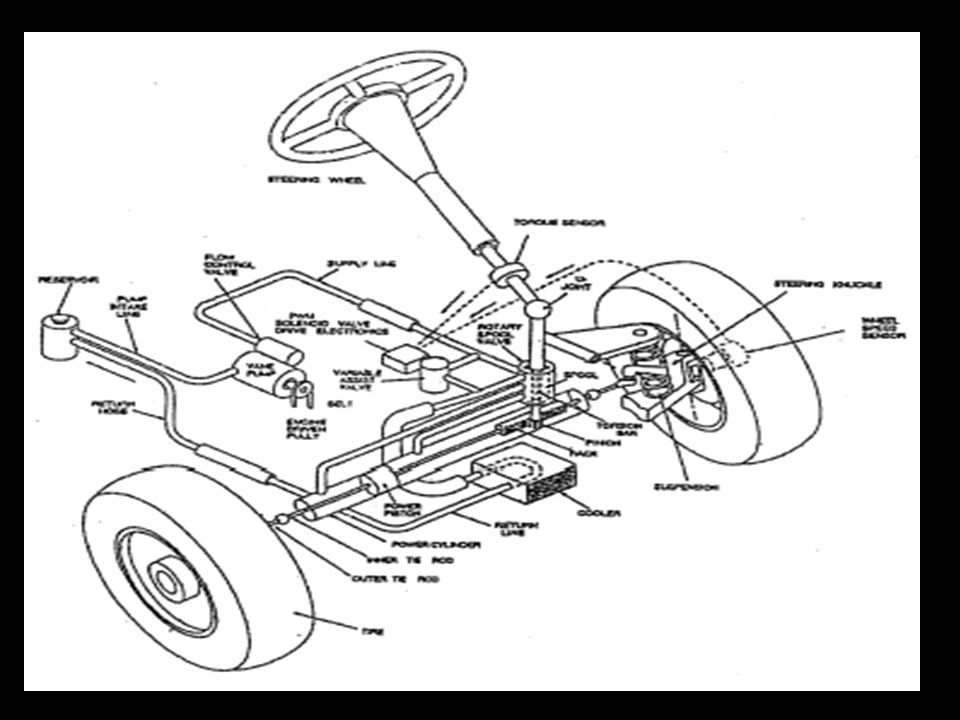
SCHEMATIC DIAGRAM OF HYDRO-POWER STEERING SYSTEM

11
Block-diagram of subsystems

12
ALI KEYHANI MODEL : Mechanical subsystem The equations for the steering column, pinion and rack can be written : Equation 1 : Equation 2 :

13
ALI KEYHANI MODEL : Mechanical subsystem Where Td=Torque generated by the driver, Theta1=rotational displacement for the steering column, K2=tire stiffness B2=Viscous damping coefficient B1=friction constant of the upper-steering column X=displacement of the rack m= mass of pinion Ap= Piston area K1=torsion bar stiffness J1=Inertia constant of the upper steering column

14
ALI KEYHANI MODEL : Mechanical subsystem The following assumptions were made : - the pressure forces on the spool are neglected. - the stiffness of the steering column is infinite. - the inertia of the lower steering column (valve spool and pinion) is lumped into the rack mass.
 is lumped into the rack mass..")
15
ALI KEYHANI MODEL hydraulic subsystem

16
By applying the orifice equations to the rotary valve metering orifices and mass conservation equations to the entire hydraulic subsystem the following equation are obtained : Equation 1 : Equation 2 : Equation 3 :

17
ALI KEYHANI MODEL hydraulic subsystem Where Ps and Po =supply and return pressure of the pump. Pl and Pr = cylinder pressure on the left and right side. Q = supply flow rate of the pump A1 and A2 are the metering orifice area Rho = density of the fluid Beta=bulk modulus of fluid L=length of the cylinder Cd= discharge co-efficient

18
Approximations in Physical Modeling

19
Examples of approximations Neglect small effects Independent environment Lumped characteristics linear relationships constant parameters Neglect uncertainty and noise Realistic physical model leads to non-linear PDEs with time and space varying parameters Simplifying assumptions led to ODEs with constant coefficients Engineering Judgement is key!

20
From Physical Model to Mathematical Model Dynamic Equilibrium Relations: balance of forces, flow rates, energy, etc. which must exist for the system and sub- systems. Compatibility Relations: how motions of the system elements are interrelated because of the way they are interconnected. Physical Variables:Selection of precise physical variables (velocity, force, voltage, pressure, flow rate, etc.) with which to describe the instantaneous state of the system.
 with which to describe the instantaneous state of the system..")
21
From Physical Model to Mathematical Model Physical Laws: Natural Physical laws which individual elements of the system obey, e.g. –Mechanical relations between force and motion –electrical relations between current and voltage –electromechanical relations between force and magnetic field –thermodynamic relations between temperature, pressure, internal energy, etc. –These are also called constitutive physical relationships!

22
Classification of Physical Variables Through Variables (one-point variables) measure the transmission of something through an element, e.g. –electric current through a resistor –fluid flow through a duct –force through a spring –heat flux flowing through

23
Classification of Physical Variables Across Variables (two-point variables) measures the difference in state between the ends of an element, e.g. –voltage drop across a resistor –pressure drop between the ends of a duct –difference in velocity between the ends of a damper –temperature difference

24
Equilibrium Relations Are always relations among through variables –Kirchoff’s current law (at an electrical node) –continuity of fluid flow –equilibrium of forces meeting at a point –heat flux balance
 –continuity of fluid flow –equilibrium of forces meeting at a point –heat flux balance")
25
Compatibility Relations Are always relations among “across variables” –Kirchoff’s voltage law around a circuit –pressure drop across all the connected stages of a fluid system –geometric compatibility in a mechanical system

26
Physical Relations Are relations between through and across variables of each individual element, e.g. f = k.x for a spring I=V/R for a resistor

27
System Components spring mass damper capacitor Voltage generator resistor inductor Hydraulic valves ….. A real system, may be broken down into components that behave like one of the basic components

28
Mechanical Quantities F=force T=torque x=displacement angular displacement dx/dt=v=velocity d /dt= =angular velocity dv/dt=a=acceleration dw/dt= =angular acceleration I=inertia m=mass k=spring constant C=damping coefficient

29
Electrical Quantities V=voltage Q=charge I=current L=inductance C=capacitance R=resistance

30
Building Blocks: Mechanical Translational: –spring; –F = kx (force displacement relationship), –E= 1/2(F 2 /k), energy stored F
, –E= 1/2(F 2 /k), energy stored F")
31
Building Blocks: Mechanical Translational: –dashpot (damper); –F = C v (C(dx/dt)) (Force-velocity relationship) –E = Cv 2 energy dissipated F
; –F = C v (C(dx/dt)) (Force-velocity relationship) –E = Cv 2 energy dissipated F")
32
Building Blocks: Mechanical Translational: –mass; –F = ma = m(d 2 x/dt 2 ) –E = 1/2 mv 2, Kinetic Energy F
 –E = 1/2 mv 2, Kinetic Energy F")
33
Building Blocks: Mechanical Rotational: –Spring; –T = k , –E = 1/2 (T 2 /k), energy stored T
, energy stored T")
34
Building Blocks: Mechanical Rotational: –dashpot; –T = C = C d /dt –P = C 2 energy dissipated T

35
Building Blocks: Mechanical Rotational: –Moment of Intertia; –T = I d 2 dt 2 – E =1/2 I 2, Kinetic energy T

36
Building Blocks: Electrical Capacitor; Q = CV or V = Q/C, E = 1/2 CV 2 energy stored V

37
Building Blocks: Electrical Resistor; V = IR or V = R (dQ/dt), energy dissipated E = I 2 R V
, energy dissipated E = I 2 R V")
38
Building Blocks: Electrical Inductor; V = L di/dt = L (d 2 Q/dt 2 ) E = 1/2 L I 2 energy stored V
 E = 1/2 L I 2 energy stored V")
39
Mechanical and Electrical Quantities

40
Thermal System T = Temperature q = heat flux R=thermal resistance Conduction, R=L/Ak, A = cross-sectional area, L=length conducted over, k = thermal conductivity Convection, R=1/Ah, A = convective surface, h = convective heat transfer coefficient C=thermal capacitance, mCp (mass X specific heat capacity)
")
41
Thermal System q = (T2-T1)/R q=Ak(T2-T1)/L; conduction q=Ah(T2-T1); convection q1-q2=mCp(dT/dt), q1-q2= rate of change of internal energy
/R q=Ak(T2-T1)/L; conduction q=Ah(T2-T1); convection q1-q2=mCp(dT/dt), q1-q2= rate of change of internal energy")
42
Hydraulic Systems We will not deal with Hydraulic systems here…...

43
Types of Systems Zeroth order systems First order systems Second order systems

44
Zeroth order systems

45
First -order systems: examples

47
Example of a First order system Temperature measuring devices (e.g. thermocouple or a thermometer) are first-order systems. If a thermometer is dipped in a liquid: # mCp dT/dt = (Ak/L) (T L -T) where m = mass of bulb, Cp is the specific heat capacity, T is the current temperature of the mercury, A is the surface area of the bulb, k is its thermal conductivity, L is the wall thickness, and T L is the temperature of the liquid.
 are first-order systems. If a thermometer is dipped in a liquid: # mCp dT/dt = (Ak/L) (T L -T) where m = mass of bulb, Cp is the specific heat capacity, T is the current temperature of the mercury, A is the surface area of the bulb, k is its thermal conductivity, L is the wall thickness, and T L is the temperature of the liquid..")
48
First order system Rewritten: #mCp dT/dt + (Ak/L) T = (Ak/L) (T L ) This is a first order system that has been subjected to a step input (which is the right hand side of the above equation) When this is integrated and initial conditions applied the solution of this system is an exponential function: #T = T L + [T 0 -T L ] e -t/
![First order system Rewritten: #mCp dT/dt + (Ak/L) T = (Ak/L) (T L ) This is a first order system that has been subjected to a step input (which is the right hand side of the above equation) When this is integrated and initial conditions applied the solution of this system is an exponential function: #T = T L + [T 0 -T L ] e -t/ ](http://images.slideplayer.com/16/5081003/slides/slide_48.jpg "First order system Rewritten: #mCp dT/dt + (Ak/L) T = (Ak/L) (T L ) This is a first order system that has been subjected to a step input (which is the right hand side of the above equation) When this is integrated and initial conditions applied the solution of this system is an exponential function: #T = T L + [T 0 -T L ] e -t/ ")
49
First order system T = T L + [T 0 -T L ] e -t/ T 0 is the temperature of the bulb at intial time; and the time constant, is written as (mCpL/Ak). Response of a First order system to a step input(decaying and progressing)
![First order system T = T L + [T 0 -T L ] e -t/ T 0 is the temperature of the bulb at intial time; and the time constant, is written as (mCpL/Ak).](http://images.slideplayer.com/16/5081003/slides/slide_49.jpg "Response of a First order system to a step input(decaying and progressing).")
50
First order system Steady state value is T L (target). How soon is this value reached ? (imp. Question) The answer lies in the magnitude of the time constant (=mCpL/Ak, in this case). Time constant is defined as the time required to complete 63.2% of the process, i.e. if the temperature has to rise from 10 degrees to 70 degrees, time constant is the time required to reach (10 +63.2%of the interval) 47.92 degrees.
 The answer lies in the magnitude of the time constant (=mCpL/Ak, in this case). Time constant is defined as the time required to complete 63.2% of the process, i.e. if the temperature has to rise from 10 degrees to 70 degrees, time constant is the time required to reach ( %of the interval) degrees..")
51
Time Constant The smaller the time constant, the faster will the system respond and the larger the time constant the slower will the system respond.

52
Second-order Systems: examples

53
Building a Mechanical System (spring-mass-dashpot) Newton’s Law: F - kx -Cv = ma F - kx - Cdx/dt = m(d 2 x/dt 2 ) or m d 2 x/dt 2 + Cdx/dt + kx = F
 Newton’s Law: F - kx -Cv = ma F - kx - Cdx/dt = m(d 2 x/dt 2 ) or m d 2 x/dt 2 + Cdx/dt + kx = F")
54
Building an Electrical System (LRC Circuit) Kirchoff’s law total current flowing towards a junction =total current flowing out of a junction In a closed system sum of potential drops across each component =applied emf. L d 2 Q/dt 2 + RdQ/dt + Q/C = Emf = V

55
Second order systems These are all second order systems since they are described by a second order differential equation. If the mass or the inductance is removed from the second order systems shown above they become first order systems. While such an electrical system makes sense the mechanical system without mass is unrealistic.

56
Second Order Systems m d 2 x/dt 2 + Cdx/dt + kx = F The solution has two components a CF and PI CF: Complementary function; solution with no F m d 2 x/dt 2 + Cdx/dt + kx = 0 PI: Particular Integral; solution with F; –m d 2 x/dt 2 + Cdx/dt + kx = F PI is dictated by the nature of F

57
Finding CF Assuming the solution form to be x(t) = Ae t (m 2 + C + k) Ae t = 0 >> m 2 + C + k= 0 Roots of the quadratic equation are:
 = Ae t (m 2 + C + k) Ae t = 0 >> m 2 + C + k= 0 Roots of the quadratic equation are:")
58
Finding CF =damping ratio n =natural frequency

59
Finding CF…. The solution takes a distinct form depending upon the values under the square-root sign When there is no damping in the system, C=0 ( =0)and both the roots are imaginary solution: where A and B are constants determined from initial conditions x(0) and dx/dt (0)
and both the roots are imaginary solution: where A and B are constants determined from initial conditions x(0) and dx/dt (0).")
60
Finding CF... This motion represents pure undamped oscillatory motion with natural frequency of

61
Undamped System

62
Finding CF When C is non-zero: 0< <1,underdamped, the roots 1 and 2 are imaginary and –x CF = exp( n t)(Pcos t + Qsin t), =damped frequency A&B or P&Q are determined from initial conditions
(Pcos t + Qsin t), =damped frequency A&B or P&Q are determined from initial conditions")
63
Underdamped System

64
Finding CF =1, critically damped, the roots 1 and 2 are equal x CF =(At+B)exp( 1)= (At+B)exp(- n t)= A&B or P&Q are determined from initial conditions
exp( 1)= (At+B)exp(- n t)= A&B or P&Q are determined from initial conditions")
65
Critically Damped System

66
Finding CF >1, overdamped, roots the roots 1 and 2 are real and unequal x CF =Aexp( 1)+Bexp( 2) A&B or P&Q are determined from initial conditions
+Bexp( 2) A&B or P&Q are determined from initial conditions")
67
Finding PI: Interesting Questions! How do systems behave with time when subject to some disturbance ? How do systems behave when a certain input is provided ? What are some expected inputs? What do the outputs look like?

68
Response of Systems Natural response and Forced Response Natural: No input to the system (system acts on its own), e.g. water flowing out of a tank when a valve is kept open. Forced: water flowing out of a tank while there is input flow from another source. Transient and Steady State Response Transient: Response that dies after a short interval of time Steady State: Response that remains after all transient response died.

69
Second Order Systems m d 2 x/dt 2 + Cdx/dt + kx = F The solution has two components a CF and PI CF: Complementary function; solution with no F m d 2 x/dt 2 + Cdx/dt + kx = 0 PI: Particular Integral; solution with F; –m d 2 x/dt 2 + Cdx/dt + kx = F PI is dictated by the nature of F

70
Step Input F is a step function F t

71
Response The solution mirrors the nature of the forcing function Therefore the particular integral is F/k So the total solution is the X CF +X PI X CF has different forms based on the nature of the system, underdamped, critically damped, overdamped, etc. X PI is dependent on the forcing function

72
Step Response Rise time (t r ): time taken to go from zero to steady state value Peak time (t p ): time taken to hit first peak Overshoot: maximum amount by which system overshoots steady state value. Settling time (t s ): time taken for oscillations to reach 2% of steady state.
: time taken for oscillations to reach 2% of steady state..")
Similar presentations