Download presentation
Presentation is loading. Please wait.

1
4. Differential forms A. The Algebra And Integral Calculus Of Forms 4.1 Definition Of Volume – The Geometrical Role Of Differential Forms 4.2 Notation And Definitions For Antisymmetric Tensors 4.3 Differential Forms 4.4 Manipulating Differential Forms 4.5Restriction Of Forms 4.6 Fields Of Forms 4.7 Handedness And Orientability 4.8 Volumes And Integration On Oriented Manifolds 4.9 N-vectors, Duals, And The Symbol Ij…k 4.10Tensor Densities 4.11 Generalized Kronecker Deltas 4.12 Determinants And Ij…k 4.13 Metric Volume Elements.

2
B. The Differential Calculus Of Forms And Its Applications 4.14 The Exterior Derivative 4.15 Notation For Derivatives 4-16 Familiar Examples Of Exterior Differentiation 4.17Integrability Conditions For Partial Differential Equations 4.18Exact Forms 4.19Proof Of The Local Exactness Of Closed Forms 4.20Lie Derivatives Of Forms 4.21 Lie Derivatives And Exterior Derivatives Commute 4.22 Stokes' Theorem 4.23 Gauss' Theorem And The Definition Of Divergence 4.24 A Glance At Cohomology Theory 4.25Differential Forms And Differential Equations 4.26 Frobenius' Theorem (Differential Forms Version) 4.27Proof Of The Equivalence Of The Two Versions Of Frobenius' Theorem 4.28 Conservation Laws 4.29Vector Spherical Harmonics 4.30Bibliography
 4.27Proof Of The Equivalence Of The Two Versions Of Frobenius Theorem 4.28 Conservation Laws 4.29Vector Spherical Harmonics 4.30Bibliography.")
3
Concepts that are unified and simplified by forms Integration on manifolds Cross-product, divergence & curl of 3-D euclidean geometry Determinants of matrices Orientability of manifolds Integrability conditions for systems of pdes Stokes' theorem Gauss' theorem … E. Cartan

4
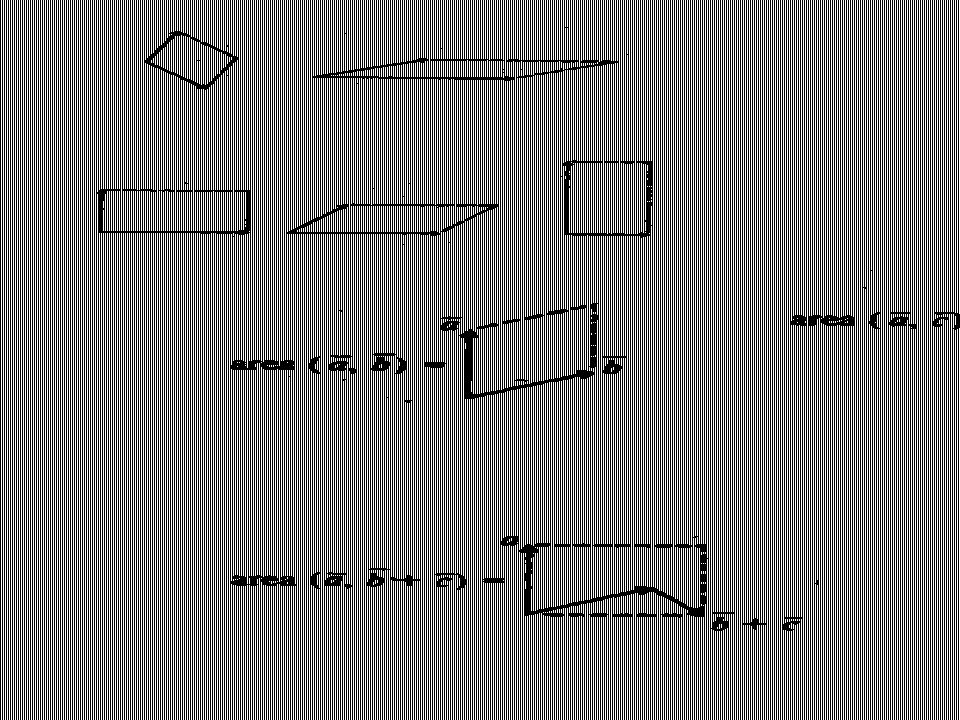
4.1. Definition Of Volume – The Geometrical Role Of Differential Forms 2 vectors define an area (no metric required). Different pairs of vectors can have same area. area(, ) is a ( 0 2 ) skew-tensor such that → Ex. 4.1 For vectors in the x-y plane:
. Different pairs of vectors can have same area. area(, ) is a ( 0 2 ) skew-tensor such that → Ex. 4.1 For vectors in the x-y plane:.")
5
4.2. Notation And Definitions For Antisymmetric Tensors A ( 0 p ) tensor is completely antisymmetric if Totally antisymmetric part of a ( 0 p ) tensor: Index-notation: A skew ( 0 p ) tensor on an n-D space has at mostindependent components
 tensor is completely antisymmetric if Totally antisymmetric part of a ( 0 p ) tensor: Index-notation: A skew ( 0 p ) tensor on an n-D space has at mostindependent components.")
6
4.3Differential Forms p-form = completely antisymmetric ( 0 p ) tensor ( p = degree of form). 0-form = scalar function.1-form = covariant vector. Wedge (exterior) product : Letbe 1-forms. Then → be the vector basis & 1-form basis, resp.Let& Then is a basis for 2-forms. (antisymmetry) = (vector) space of all p-forms at x M
 product : Letbe 1-forms. Then → be the vector basis & 1-form basis, resp.Let& Then is a basis for 2-forms. (antisymmetry) = (vector) space of all p-forms at x M.")
7
Grassmann algebra = { all p-forms, +, } Ex. 4.8: Show that (associativity) Dim = if
 Dim = if")
8
4.4 Manipulating Differential Forms Attention: signs Letbe p- & q-forms, resp. Then Proof:Letbe 1-forms such that Then

9
Proof using basis:

10
Contraction: Letbe a vector &a p-form. i.e.,Define Example:whereare 1-forms [ p! terms]
![Contraction: Letbe a vector &a p-form. i.e.,Define Example:whereare 1-forms [ p! terms]](http://images.slideplayer.com/15/4805983/slides/slide_10.jpg "Contraction: Letbe a vector &a p-form. i.e.,Define Example:whereare 1-forms [ p! terms]")
11
→ In general = (p–1)-form with components
-form with components")
12
4.5. Restriction of Forms A p-form is a ( 0 p ) tensor → its domain is The restriction (section)to a subspace W of V is → →is 1-D (annulled by W)
 tensor → its domain is The restriction (section)to a subspace W of V is → →is 1-D (annulled by W).")
13
4.6. Fields of Forms A field Ω p (M) of p-forms on a manifold M = a rule that gives a p-form at each point of M. Ditto vector field. A submanifold S of M picks a subspace V P of T P P S. → Restriction of p-form field to S = restriction of p-form at P to V P P S.
 of p-forms on a manifold M = a rule that gives a p-form at each point of M. Ditto vector field. A submanifold S of M picks a subspace V P of T P P S. → Restriction of p-form field to S = restriction of p-form at P to V P P S..")
14
4.7. Handedness and Orientability → Let Ifis a basis for T P (M), theniffat P. Relative handedness is independent of choice of M is orientable if it is possible to define handedness continuously over it, i.e., a continuous basis with the same handedness everywhere on M. i.e., E.g. E n is orientable. The Mobius band is not. Absolute handedness is fixed by the choice of the coordinate chart.

15
4.8. Volumes and Integration on Oriented Manifolds Integration of a Function ( parallelepiped / cell ) (volume of cell) (function) Integration of f over cell : ( n-form ) Integration of f over U M :
 (volume of cell) (function) Integration of f over cell : ( n-form ) Integration of f over U M :.")
16
Change of Variables is independent of coordinates up to an overall sign. E.g., M is 2-D : Changing coordinates → = Jacobian Riemannian integration:

17
Orientability Letbe another basis which differs fromonly in handedness. Let the entire region of integration be orientable, then By convention, a right-handed basis is always assumed in

18
Integration on Submanifold is defined only for n-form on an n-D manifold M, or p-form over a p-D submanifold S. Relation between the orientabilities of M and S ? ( Domain must be internally orientable ) Let M be orientable and a right-handed n-form at P S. the p-formis a right- handed restriction ofto S not tangent to S at P,Given n–p independent normal vectors determines an external orientation for S at P. S is externally orientable if it is possible to define an external orientation continuously over it. If U M is orientable, then S U is either both internally and externally orientable, or it is neither. Otherwise, S may be one but not both.
 Let M be orientable and a right-handed n-form at P S. the p-formis a right- handed restriction ofto S not tangent to S at P,Given n–p independent normal vectors determines an external orientation for S at P. S is externally orientable if it is possible to define an external orientation continuously over it. If U M is orientable, then S U is either both internally and externally orientable, or it is neither. Otherwise, S may be one but not both..")
19
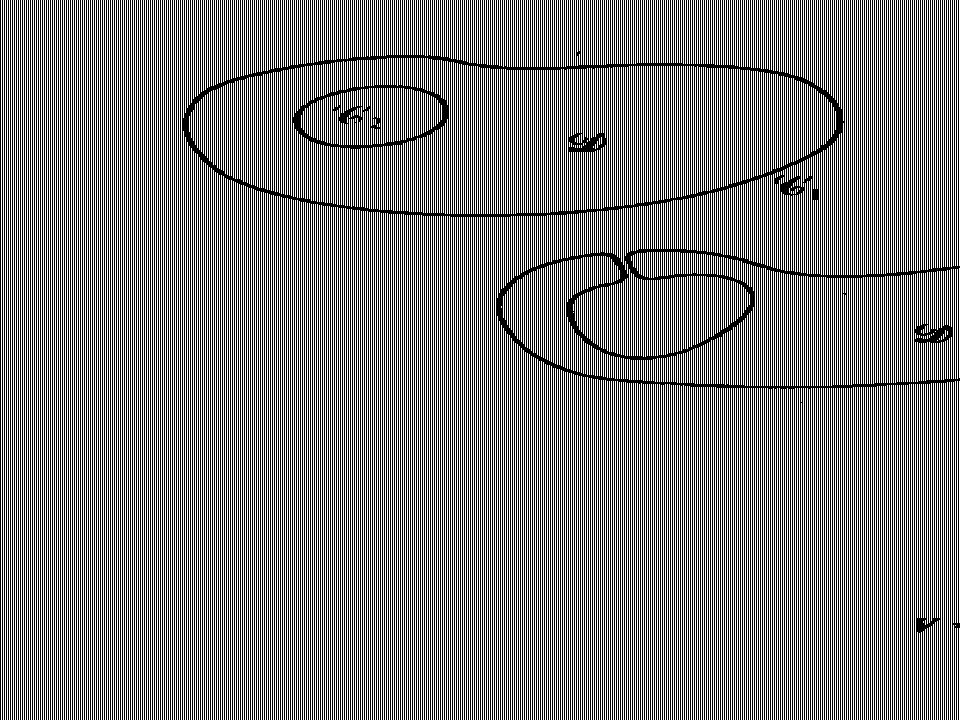
Mobius strip embedded in R 3. M is not externally orientable in R 3. A curve is always internally orientable → it can't be externally orientable inside a nonorientable submanifold C 1 is not orientable in M But C 2 is both internally & externally orientable in M

20
4.9. N-vectors, Duals, and the Symbol Dual Maps g = metric tensor : dual map Dual of a q-vector T

21
*T is an (n-q)-form with components
-form with components")
22
Example: Cross Products in E 3 Then be vectors &Letthe associated 1-forms. Let → Settinggives The cross product exists only in E 3, where

23
= n-vector with components if

Similar presentations


:>")





>")











 Dr. SOHAIL IQBAL>")
