Download presentation
Presentation is loading. Please wait.

1
Global Positioning System
By Farhan Saeed

2
GPS Satellite based navigation system made up of a network of 24 satellites Originally intended for military applications In the 1980’s, the US government made the system available for civilian use. There are no subscription fees or setup charges to use GPS

3
Basic Principle GPS satellites circle the earth twice a day in a very precise orbit and transmit signal information to earth. GPS receiver compares the time a signal was transmitted by a satellite with the time it was received. The time difference tells the GPS receiver how far away (distance) the satellite is. With distance measurements from a few more satellites, the receiver can determine the user’s position and display it as a latitude and longitude.
 the satellite is. With distance measurements from a few more satellites, the receiver can determine the user’s position and display it as a latitude and longitude.")
4
Basic Principle A GPS receiver must be locked on to the signal of at least three satellites to calculate a two-dimensional position (latitude and longitude) and track movement. With four or more satellites in view, the receiver can determine the user’s three-dimensional position (latitude, longitude and altitude).
 and track movement. With four or more satellites in view, the receiver can determine the user’s three-dimensional position (latitude, longitude and altitude).")
5
GPS Accuracy Today’s GPS receivers are extremely accurate and can give average positional accuracy within 15 metres or better. With Differential GPS (DGPS) receiver accuracies in the order of 3 to 5 metres are possible.
 receiver accuracies in the order of 3 to 5 metres are possible.")
6
GPS Satellite System The 24 satellites (21 active plus 3 operating spares) that make up the GPS space segment are orbiting the earth about miles above us. They are constantly moving at approx m/h, making two complete orbits in approximately 24 hours, i.e. orbital period of approximately 12 hours.
 that make up the GPS space segment are orbiting the earth about miles above us. They are constantly moving at approx m/h, making two complete orbits in approximately 24 hours, i.e. orbital period of approximately 12 hours.")
7
GPS Satellite System GPS satellites are powered by solar energy and are built to last approximately 10 years. They have back up batteries on board to keep them running in the event of solar eclipses. Small rocket boosters on each satellite enable them to keep flying on the correct path.

8
GPS Satellite System The first GPS satellite was launched in 1978.
A full constellation of 24 satellites was achieved in 1994. Each satellite is built to last approximately 10 years. Replacements are constantly being built and launched into orbit. A GPS satellite weighs approximately 1500 kg and is about 6 m across with solar panels extended. Transmitter power is only approximately 50 watts or less.

9
Satellites Signal GPS satellites transmit two low power radio signals, designated L1 and L2. Civilian GPS receivers “listen” on the L1 frequency of MHz in the UHF band. The signals travel using direct (space) wave propagation, often referred to as “line of sight” radio communication. Signals will pass through clouds, glass and plastic but will not go through most solid objects.
 wave propagation, often referred to as line of sight radio communication. Signals will pass through clouds, glass and plastic but will not go through most solid objects.")
10
Satellites Signal L1 contains a complex pattern of digital code signals, the “Protected” P code and the “Coarse Acquisition” C/A code. This GPS transmission contains 3 different types of coded information, which are essential for calculating the travel time from the satellite to the GPS receiver on the earth. (Time of arrival) The travel time multiplied by the speed of light equals the satellites range (distance from the satellite to the GPS receiver).
 The travel time multiplied by the speed of light equals the satellites range (distance from the satellite to the GPS receiver).")
11
Coded Information A pseudorandom code – this is simply an ID code that identifies which satellite is transmitting information from which you are receiving Ephemeris data – this is information continuously transmitted by each satellite, containing important information about the status of the satellite (healthy or unhealthy), current date and time. Almanac data – this information tells your GPS receiver where each satellite should be at any time throughout the day.
, current date and time. Almanac data – this information tells your GPS receiver where each satellite should be at any time throughout the day.")
12
How does GPS work? GPS receiver has to know two things about the satellites, i.e. where they are (location) and how far away they are (distance). Your distance from a given satellite equals the velocity of the transmitted signal multiplied by the time it takes the signal to reach you, i.e. Distance = velocity of transmitted signal x travel time Velocity= 300,000,000 metres per second Travel time = Time taken by signal to arrive at the receiver.

13
Travel Time The transmitted digital code is called a pseudo-random code. When a satellite is generating a pseudo-random code, the GPS receiver is generating the same code and tries to match it up to the satellite’s code. The GPS receiver then compares the two codes to determine how much it needs to delay (or shift) its code in order to match the satellite code. This delay time (shift) is multiplied by the velocity of propagation of the radio wave to get the distance (range).
 its code in order to match the satellite code. This delay time (shift) is multiplied by the velocity of propagation of the radio wave to get the distance (range).")
14
GPS Receiver Clock Your GPS receiver clock does not keep the time as precisely as the satellite clocks. So each distance measurement needs to be corrected to account for the GPS receiver’s internal clock error. The range measurement is referred to as a pseudo-range. To determine position using pseudo-range data, a minimum of four satellites must be tracked and the four subsequent fixes must be recomputed until the clock error disappears.

15
GPS Position Like Radar Ranges!

16
Almanac Data The unit stores data about where the satellites are located at any given time. This data is called the almanac. “cold” receiver “warm” receiver

17
GPS receiver technology
Most modern GPS receivers are a parallel multi-channel design. These parallel receivers typically have between 5 and 12 receiver circuits, each devoted to one particular satellite signal, so strong locks can be maintained on all satellites at all times.

18
Sources of errors Ionosphere and troposphere delays
The satellite’s radio signal slows as it passes through the atmosphere. Your GPS system uses a built-in model that calculates an average amount of delay to partially correct for this type of error.

19
Sources of errors Signal multi-path
This occurs when the GPS radio signal is reflected off objects such as large topographical objects and surfaces before it reaches your receiver. This effectively increases the travel time of the GPS radio signal, thereby causing errors.

20
Sources of errors Receiver clock errors
Your receiver’s built-in clock is not as accurate as the atomic clocks on board the GPS satellites. Therefore, it may have very slight timing errors.

21
Sources of errors Orbital errors
These are also known as ephemeris errors, and are inaccuracies of the satellite’s reported location. This could be, for example, due to the satellite’s orbit precessing in azimuth.

22
Sources of errors Number of satellites visible
The more satellites your GPS receiver can “see”, the greater the accuracy. Topographical and geographical terrain, electronic interference and adverse weather and precipitation can inhibit radio signal reception, causing position errors or possibly no position indication at all. GPS receivers typically do not work indoors, under water or underground.

23
Sources of errors Satellite geometry/shading
Ideal satellite geometry exists when the satellites are located at wide angles relative to each other, giving a position based on a wide angle of cut from several position lines. This is often referred to as a situation where the position fix is based on a good Horizontal Dilution Of Position (HDOP).
.")
24
Sources of errors Selective Availability (SA) –
Selective availability (SA) is an intentional degradation of the signal once imposed by the US Department of Defence. The US government turned off SA in May 2000, which significantly improved the accuracy of civilian GPS receivers.
 is an intentional degradation of the signal once imposed by the US Department of Defence. The US government turned off SA in May 2000, which significantly improved the accuracy of civilian GPS receivers.")
25
Sources of errors Selective Availability (SA) –
However, this degradation could be re-introduced at any time by the US government and has led to the development of two initiatives, which help to overcome any future degradation of the system for civilian users: the development of DGPS the proposed development of an EU supported initiative called Galileo

26
GPS system accuracy 100 metres - accuracy of the GPS system when subjected to accuracy degradation under the US government Selective Availability (SA) programme 15 metres - typical GPS position accuracy without SA. Available at present to all civilian users 3-5 metres - typical differential GPS (DGPS) position accuracy
 programme. 15 metres - typical GPS position accuracy without SA. Available at present to all civilian users. 3-5 metres - typical differential GPS (DGPS) position accuracy.")
27
Exercise

28
Chart datum Charts are essentially grids created from a starting reference point called a datum. Many charts still being used today were originally created decades ago. Over time, technology has allowed us to improve our surveying skills and create more accurate charts. However, there is still a need to adapt GPS receivers to use with older charts.

29
Chart Datum A navigational chart is referenced to two datums – one horizontal, for latitude and longitude, and one vertical for depth and height. Because the earth is not a regular shape the accuracy of each datum will vary as you get further from the specific location for which it was defined. OSGB36, European 1950, NAD27 etc. Satellite systems require a global datum and GPS positions are based on the World Geodetic System 1984 (WGS-84) which is a model of the entire earth.
 which is a model of the entire earth.")
31
DGPS The fundamental principle of DGPS is the comparison of the position of a fixed point, referred to as the reference station, with positions obtained from a GPS receiver at that point.

33
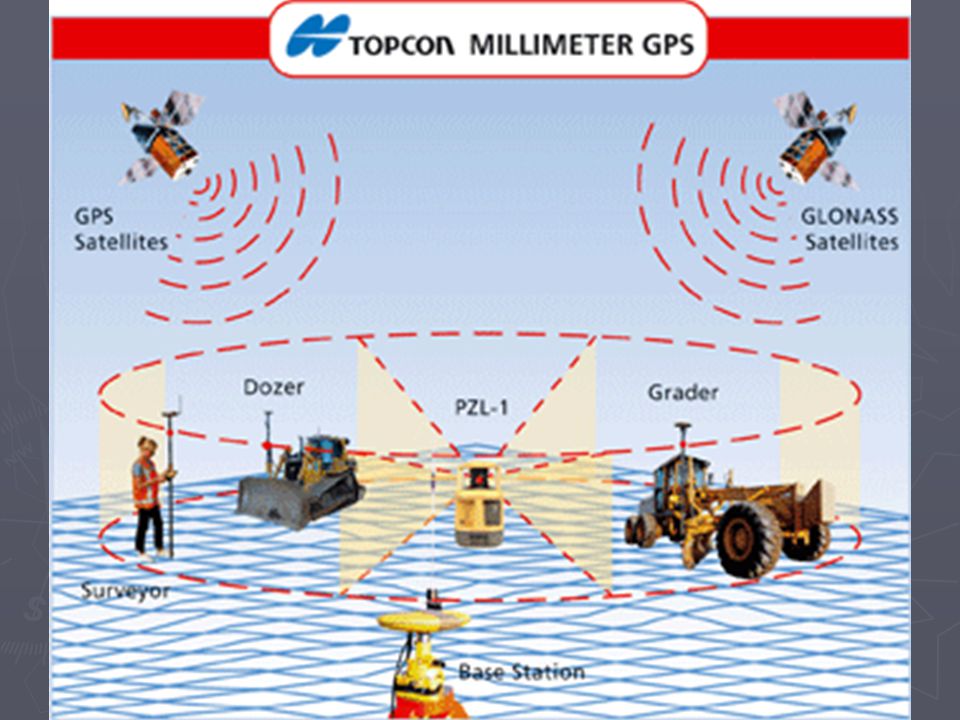
GLONASS The GLObal NAvigation Satellite System (GLONASS) is similar to GPS in that it is a satellite based navigation system, providing global 24 hour a day all weather access to precise position, velocity and time information to a suitably equipped user. Any receiver capable of operating with both GLONASS and GPS would offer the best of both worlds, with one system making up for the limitations of the other at specific latitudes.
 is similar to GPS in that it is a satellite based navigation system, providing global 24 hour a day all weather access to precise position, velocity and time information to a suitably equipped user. Any receiver capable of operating with both GLONASS and GPS would offer the best of both worlds, with one system making up for the limitations of the other at specific latitudes.")
35
Galileo Galileo is a proposed European satellite navigation system designed purely for civilian use which is very much in the initial discussion stages. Europe hopes to deploy by 2010.

Similar presentations






 for Precision Farming>")









. NAVSTAR Global Positioning System (GPS) Globally.>")




