Download presentation
Presentation is loading. Please wait.

1
6077SA NUE 046

2
3 Phase Induction Motor Characteristics Interpret information from torque/slip curves of AC induction motors List the operating characteristics of squirrel cage induction motors List the operating characteristics of slip ring induction motors Identify details from motor nameplates Calculate the efficiency of induction motors At the end of this section you will be able to:

3
Revision What determines the synchronous speed? Why can’t the rotor operate at synchronous speed? What do we call the difference between n R and n? How do we work out the percentage slip of a motor?

4
Motor Starting Greatest relative speed between RMF & Rotor conductors Induced voltage greatest Equivalent to a transformer with a shorted secondary Frequency is highest Rotor torque must be higher than the apposing torque for the rotor to accelerate.

5
As load torque increases Rotor RPM drops Relative speed between RMF & Rotor conductors increases Rotor current increases Rotor torque increases Rotor RPM stabilises Motor Running

6
Rotor Current Torque caused by induced current in rotor conductors Rotor current is a result of:- 1.Rotor speed 2.Rotor impedance Frequency Resistance Inductive reactance

7
Rotor Current High frequency in rotor conductors More metal surrounding conductor the deeper in the rotor. L is highest in that part of the conductor X L is highest I is lowest Effective CSA is reduced Current is limited

8
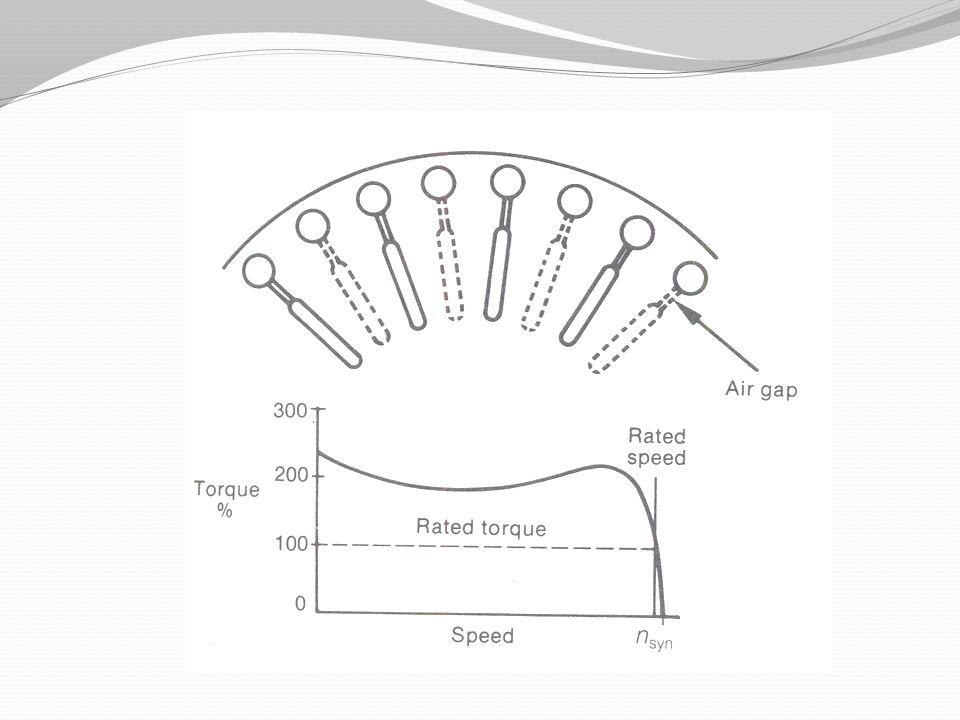
Torque Speed Curve Rotor Speed T o r q u e Synchronous speed Rated torque Rated speed

9
Torque Slip Curve Slip % T o r q u e Synchronous speed Rated torque Rated speed 0100

Similar presentations











>")

?>")

 machine.>")










