Download presentation
Presentation is loading. Please wait.

1
Induction Motor •Why induction motor (IM)? –Robust; No brushes. No contacts on rotor shaft –High Power/Weight ratio compared to Dc motor –Lower Cost/Power –Easy to manufacture –Almost maintenance-free, except for bearing and other mechanical parts •Disadvantages –Essentially a “fixed-speed” machine –Speed is determined by the supply frequency –To vary its speed need a variable frequency supply

2
Construction Stator

3
Construction Squirrel Cage Rotor

4
Construction

5
Performance of Three-Phase Induction Motor

6
Example 5.1 A 3-phase, 460 V, 100 hp, 60 Hz, four‑pole induction machine delivers rated output power at a slip of Determine the: (a) Synchronous speed and motor speed. (b) Speed of the rotating air gap field. (c) Frequency of the rotor circuit. (d) Slip rpm. (e) Speed of the rotor field relative to the rotor structure. Stator structure. Stator rotating field. (f) Rotor induced voltage at the operating speed, if the stator‑to‑rotor turns ratio is 1 : 0.5. Solution: (b) 1800 (same as synchronous speed)
 Synchronous speed and motor speed. (b) Speed of the rotating air gap field. (c) Frequency of the rotor circuit. (d) Slip rpm. (e) Speed of the rotor field relative to the. rotor structure. Stator structure. Stator rotating field. (f) Rotor induced voltage at the operating speed, if the stator‑to‑rotor turns ratio is 1 : 0.5. Solution: (b) 1800 (same as synchronous speed)")
8
Equivalent Circuit of the Induction Motor

9
Equivalent Circuit of the Induction Motor

11
IEEE‑Recommended Equivalent Circuit
Theveninequivalent circuit

12
If , then,

13
Tests To Determine The Equivalent Circuit
No‑load test

14
Locked‑rotor test

15
Blocked‑rotor equivalent circuit for improved value for

17
Example 4.2 A no‑load test conducted on a 30 hp, 835 r/min, 440 V, 3‑phase, 60 Hz squirrel‑cage induction motor yielded the following results: No‑load voltage (line‑to‑line): 440 V No‑load current: 14 A No‑load power: 1470 W Resistance measured between two terminals: 0.5 The locked‑rotor test, conducted at reduced voltage, gave the following results: Locked‑rotor voltage (line‑to‑line): 163 V Locked‑rotor power: 7200 W Locked‑rotor current: 60 A Determine the equivalent circuit of the motor. Solution: Assuming the stator windings are connected in way, the resistance per phase is: From the no‑load test:
: 440 V. No‑load current: 14 A. No‑load power: 1470 W. Resistance measured between two terminals: 0.5 The locked‑rotor test, conducted at reduced voltage, gave the following results: Locked‑rotor voltage (line‑to‑line): 163 V. Locked‑rotor power: 7200 W. Locked‑rotor current: 60 A. Determine the equivalent circuit of the motor. Solution: Assuming the stator windings are connected in way, the resistance per phase is: From the no‑load test:")
18
From the blocked‑rotor test
The blocked‑rotor reactance is:

20
Example 5.3 The following test results are obtained from a three-phase 60 hp, 2200 V, six‑pole, 60 Hz squirrel‑cage induction motor. (1) No‑load test: Supply frequency = 60 Hz, Line voltage = 2200 V Line current = 4.5 A, Input power = 1600 W (2) Blocked‑rotor test: Frequency = 15 Hz, Line voltage = 270 V Line current = 25 A, Input power = 9000 W (3) Average DC resistance per stator phase: 2.8 (a) Determine the no‑load rotational loss. (b) Determine the parameters of the IEEE‑recommended equivalent circuit (c) Determine the parameters (Vth, Rth, Xth) for the Thevenin equivalent circuit of Fig.5.16.
 No‑load test: Supply frequency = 60 Hz, Line voltage = 2200 V. Line current = 4.5 A, Input power = 1600 W. (2) Blocked‑rotor test: Frequency = 15 Hz, Line voltage = 270 V. Line current = 25 A, Input power = 9000 W. (3) Average DC resistance per stator phase: 2.8 (a) Determine the no‑load rotational loss. (b) Determine the parameters of the IEEE‑recommended equivalent circuit. (c) Determine the parameters (Vth, Rth, Xth) for the Thevenin equivalent circuit of Fig")
22
(a) No-Load equivalent Circuit (b) Locked rotor equivalent circuit
= .

23
impedance at 15 Hz is: The blocked‑rotor reactance at 15 Hz is Its value at 60 Hz is at 60 Hz

24
(c)
")
25
PERFORMANCE CHARACTERISTICS
Where or

26
At low values of slip,

27
At larger values of slip,

28
Torque‑speed profile at different voltages.

29
Maximum Torque Then

30
. Torque speed characteristics for varying

31
If is small (hence is negligibly small) Then Then
 Then Then")
32
If is small (hence is negligibly small)
")
33
Efficiency Power flow in an induction motor. The power loss in the stator winding is:

34
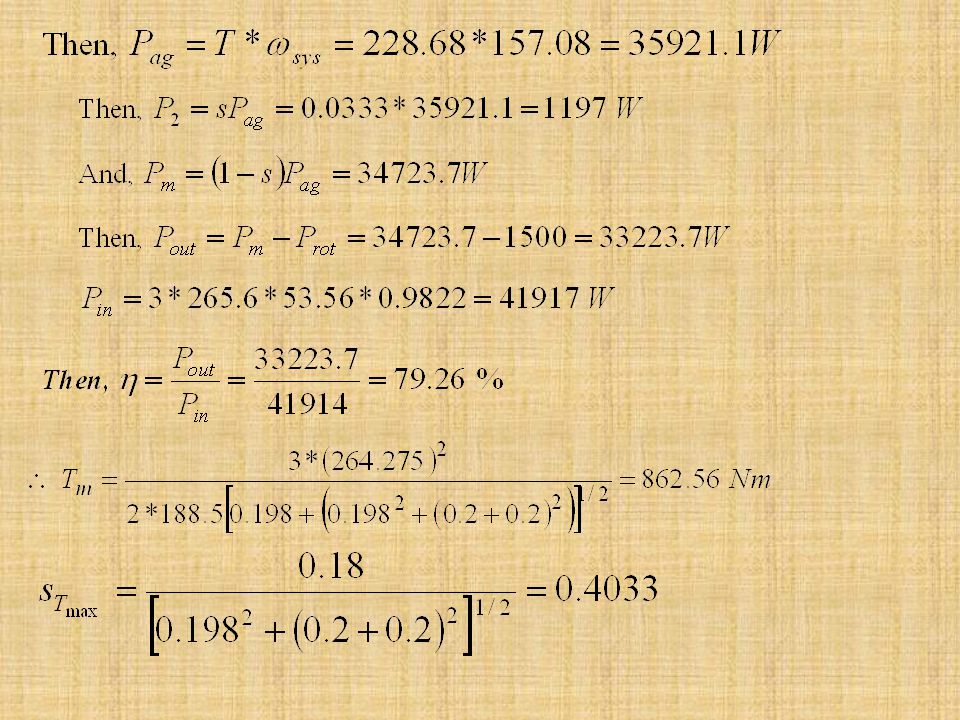
Ideal Efficiency

39
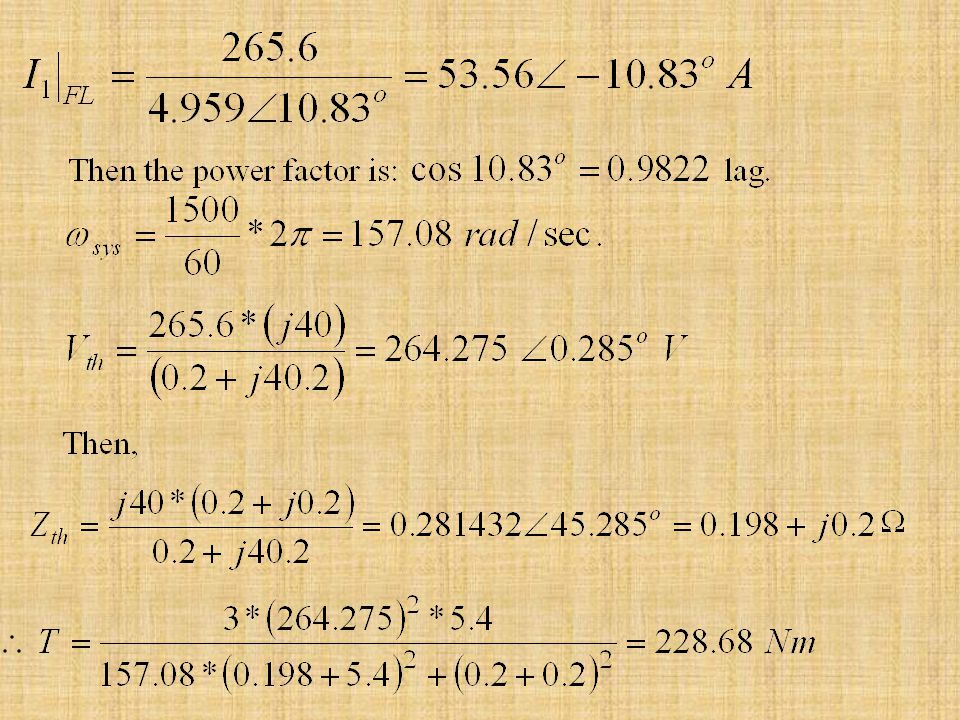
= N.m

40
(c) (i) (c) (ii)
 (i) (c) (ii)")
41
Note that for parts (a) and (b) it is not necessary to use Thevenin equivalent circuit. Calculation can be based on the equivalent circuit of Fig.5.15 as follows:

45
Solution: From no load test: From blocked rotor test:

47
Input impedance Input power:

48
Stator CU losses: Air gap power Rotor CU losses Mechanical power developed: From no load test:

54
Note that the equivalent circuit parameters are not given
Note that the equivalent circuit parameters are not given. Therefore equivalent circuit parameters cannot be used directly for computation.)a) The synchronous speed is
a) The synchronous speed is.")
60
Solution:

64
Solution:

Similar presentations






















>")

>")
>")












