Download presentation
Presentation is loading. Please wait.

1
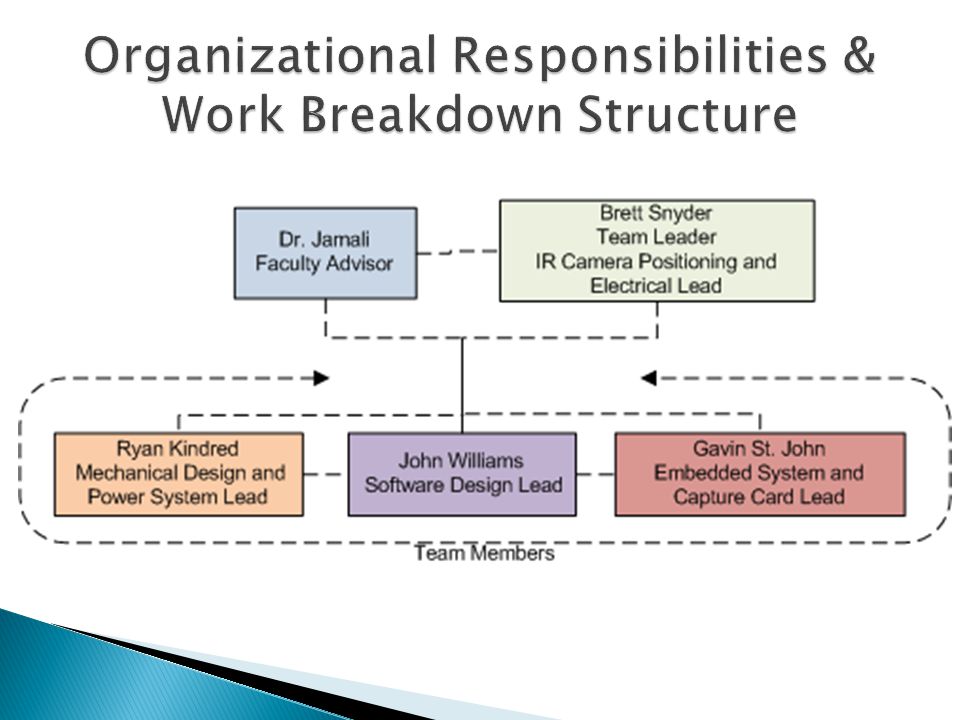
By: Brett Snyder (Team Leader) John Williams Ryan Kindred Gavin St. John Faculty Advisor – Dr. Jamali Course Instructor – Dr. Serpen Final Presentation December 8 th, 2010

3
Motivation Project Overview Overview of Objectives IR Camera Positioning and Electrical Mechanical Design and Power System Embedded System and Capture Cards Software Design Recommendations Summary Q&A

4
Recent growth in wind power 10-40,000 bird deaths per year Ethical and legal consequences Economics

5
Improve an existing system to gather info on migratory birds in the vicinity of off-shore wind turbines Devices utilized: ◦ X-Band Radar – altitude ◦ IR Camera – x,y position Record and use data to identify species

6
Capture and timestamp video feeds from IR camera and X-band radar Transmit video data wirelessly to remote computer Accurate positioning of IR camera from a remote computer

7
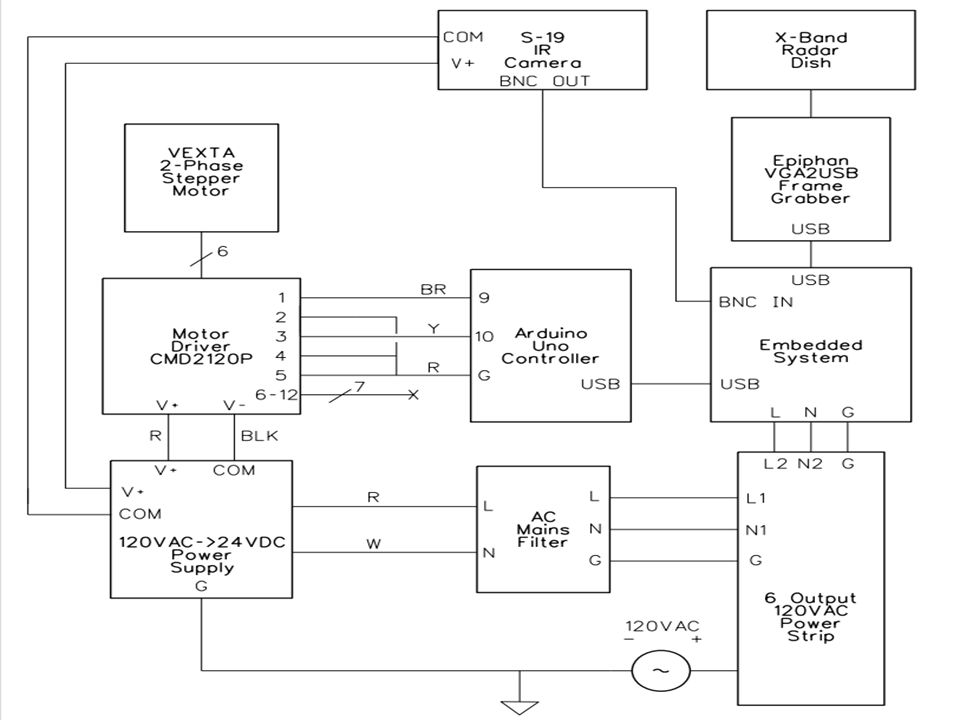
Used a stepper motor in lieu of a servo Arduino Uno microcontroller VEXTA motor driver Tolerances

9
Serial communication through USB port Wrote firmware to communicate with C# Single character commands to set rotation direction and step the motor Used logic to control voltages of signals going to motor driver

10
Selection of stepper motor ◦ Cost vs. Size Holding Torque Coupling Bearing

12
Components require 120VAC and 24VDC Power supply selection ◦ Stepper Motor:2.9A@24VDC=70W ◦ IR Camera:16W Peak ◦ Required Wattage:86W ◦ Power Supply: 150W Mains filter ◦ Used to prevent the noise generated in the driver from being transmitted externally via the power supply line

13
Selection ◦ IR Camera Winnov Videum 4100 AV ◦ Radar Epiphan VGA2USB Features ◦ Onboard Processing Power ◦ Support DirectShow

15
Cost ◦ Custom Built vs. Pre-Built Inputs/Outputs ◦ Capture Card Interface ◦ Networking Capabilities Processing Power ◦ Video Encoding

16
Three pieces of software were developed ◦ Video Capture Software ◦ FTP File Transfer Client ◦ Motor Controller Software All software written in C#

17
Provides a common interface to capture from both capture devices Timestamps files accurately within 10ms Uses DirectShow

19
Uses FileZilla for FTP server Wrote FTP client that automatically polls and downloads files

20
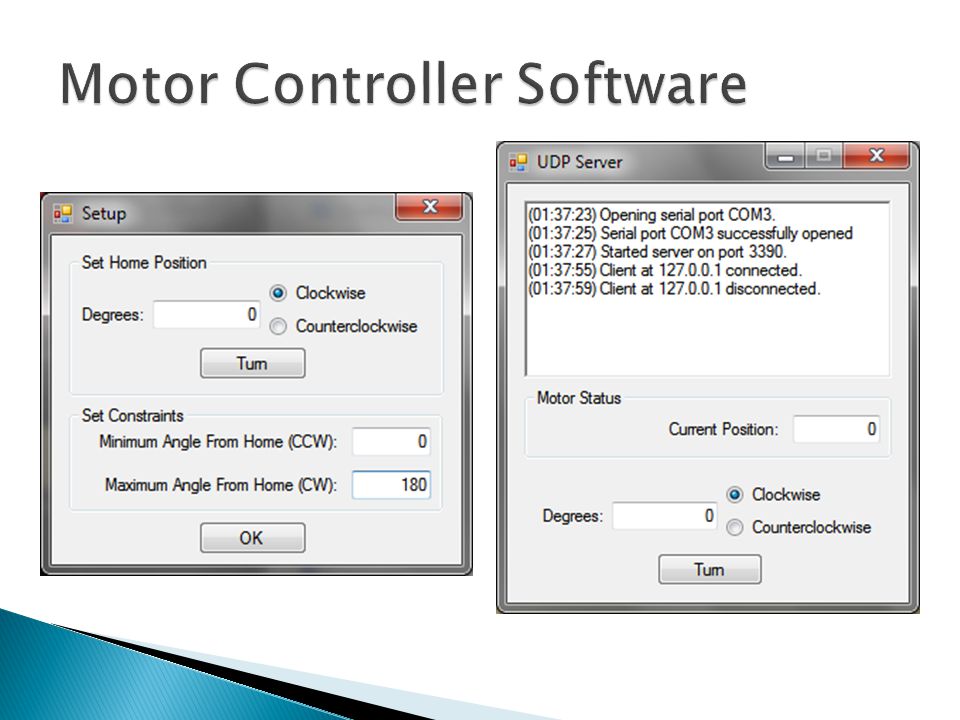
Developed both a server and a client Motor controlled via USB to Arduino Can send commands both locally and remotely Uses a network library called Lidgren Movement constraints Position messages

22
Weatherproofing Mechanical limit switch Improve manufacturability Printed Circuit Board (PCB) solution Relocate movement command loop to firmware Use of a better encoder
 solution Relocate movement command loop to firmware Use of a better encoder")
23
Used frame grabbers to capture separate video feeds Time stamped video for synchronization Created FTP client to download video files to a remote computer Used a stepper motor to obtain positioning accuracy within 1 degree Created UDP server and client software for remote positioning of the IR camera

Similar presentations
















 Manoj Bhambwani Tameka Thomas.>")





