Download presentation
Presentation is loading. Please wait.

1
Dynamics a branch of mechanics that deals with the “motion” of bodies under the action of forces. Two parts: Kinematics Study of motion without reference to the forces that cause the motion 2. Kinetics Study of motion under the action of forces on bodies for resulting motions.

2
How does wAB related with another wCD
Kinematics Kinetics study of objects’ motion without reference to the forces that cause the motion study of motion under the action of forces on bodies about the bodies’ motions. kinematics relation is necessary to solve kinetics problem How does wAB related with another wCD (kinematics) If you want aCD = 36.5 rad/s2, how much torques do you apply to AB (kinetics)
 If you want aCD = 36.5 rad/s2, how much torques do you apply to AB. (kinetics)")
3
Kinematics Kinetics Particles Before Midterm After Midterm Rigid Bodies

4
Kinematics of particles
How to describe the motion? How to describe the position? Frame: Ref-Point + Coordinate Motion: time-related position Coordinate Path of the particle = “position vector” (start from some convenient point: reference point) (x,y) coord time-related info: velocity , acceleration A' (r,q) coord from A to A' takes t second s r A q Distant traveled: measured along the path, scalar O Reference Point You are going to learn: Displacement ( in t ): (x,y) coord n-t coord r-q coord relative frame
 (x,y) coord. time-related info: velocity , acceleration. A (r,q) coord. from A to A takes t second. s. r. A. q. Distant traveled: measured along the path, scalar. O. Reference. Point. You are going to learn: Displacement ( in t ): (x,y) coord. n-t coord. r-q coord. relative frame.")
5
By defining the axis according to the moving direction
2/2 Rectilinear Motion (1D-motion) By defining the axis according to the moving direction “displacement, velocity, acceleration” can be considered as scalar quantity. Particle moving on straight line path. reference point The particle is at point P at time t and point P at time t+t with a moving distance of s. P: t P’: t+Dt reference axis +s D s “average” velocity: Positive v is defined in the same direction as positive s. i.e.) positive v implies that s is increasing, and negative v implies that s is deceasing. “instantaneous” velocity :
 By defining the axis according to the moving direction. displacement, velocity, acceleration can be considered as scalar quantity. Particle moving on. straight line path. reference. point. The particle is at point P at time t and point P at time t+t with a moving distance of s. P: t. P’: t+Dt. reference axis. +s. D s. average velocity: Positive v is defined in the same direction as positive s. i.e.) positive v implies that s is increasing, and negative v implies that s is deceasing. instantaneous velocity :")
6
Rectilinear Motion “instantaneous” acceleration ( similarly as )
or Eliminating dt, we have or 3 Equations, but only 2 are independent Positive a is defined in the same direction as positive v (or s). Ex. positive a implies that the particle is speeding up (accelerating) negative a implies that the particle is slowing down (decelerating).
. Ex. positive a implies that the particle is speeding up (accelerating) negative a implies that the particle is slowing down (decelerating).")
8
Formula Interpretations of a,v,s,t
(1) Constant acceleration (a= constant). Find v(t), s(t)
 Constant acceleration (a= constant). Find v(t), s(t)")
9
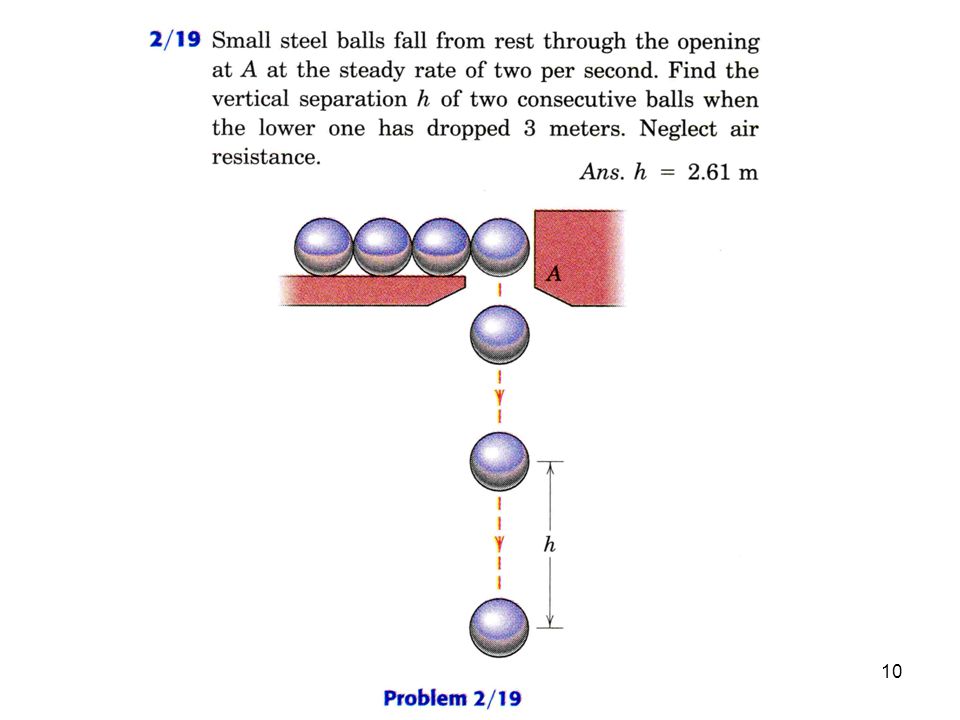
Ans 5 m

11
a=g (const) s2 Time required for 3-m falling. s1 =3
2nd Thus, the 2nd ball has time to fall: 1st Therefore, the 2nd ball travels:

12
Formula Interpretations of a,v,s,t
(2) Acceleration given as a function of time, a = f(t) Find v(t), s(t) v(t) s(t) Or by solving the differential equation: s(t) v(t)
 Acceleration given as a function of time, a = f(t) . Find v(t), s(t) v(t) s(t) Or by solving the differential equation: s(t) v(t)")
13
Formula Interpretations of a,v,s,t
(3) Acceleration given as a function of velocity, a = f(v) Find s(v), t(v) v(t) t(v) s(v) s(t) Find v(t), s(t), a(t)
 Acceleration given as a function of velocity, a = f(v) Find s(v), t(v) v(t) t(v) s(v) s(t) Find v(t), s(t), a(t)")
14
Formula Interpretations of a,v,s,t
(4) Acceleration as function of displacement: a = f (s) Find v(s), t(s) Find s(t), v(t), a(t) v(s) t(s) s(t) v(t) a(t)
 Acceleration as function of displacement: a = f (s) Find v(s), t(s) Find s(t), v(t), a(t) v(s) t(s) s(t) v(t) a(t)")
15
Graphical Interpretations of a, v, s, t
The familiar slopes and areas Area under a-t curve from t1-t2 = v(t2) − v(t1) s-t curve a-t curve v-t curve Area under v-t curve from t1-t2 = s(t2) − s(t1)
 − v(t1) s-t curve. a-t curve. v-t curve. Area under v-t curve from t1-t2. = s(t2) − s(t1)")
16
Graphical Interpretations of a, v, s, t
Less familiar interpretations Find a ! v-s curve a-s curve Find v ! q q

18
Given the acceleration-displacement plot as shown.
Determine the velocity when x = 1.4 m, assuming that the velocity is 0.8 m/s at x = 0 a-s curve Area under curve = = 0.36 1.4 + or -? ANS

19
The velocity of a particle which moves along the x-axis is given by
m/s , where t is in second. Calculate the displacement x of the particle during the interval from t = 2 sec to t = 4 sec. Solution: ANS

21
v0 v s a=a(v) Fig1 Case (b) Case (a)
 Fig1 Case (b) Case (a)")
22
Find v(t), s(t) of the mass if s start at zero and
+ or - ? Altenative Solution: Differential equation s

23
Find h and v when the ball hits the ground. downward: Upward:
= m/s = m

24
SP2/1 Given: Find 1) t when v=+72 x How many turns? 2) a when v=+32 3) total distance traveled from t=1 to t=4 Correct? total distance traveled net displacement != total distance traveled

25
Rectilinear equations can be used for curved motion
2/44 The electronic trottle control of a model train is programmed so that the train speed varies with position as shown. Determine the time t required for the train to complete one lap. Rectilinear motion? a along the path not total a v, a v, a s s Rectilinear equations can be used for curved motion if s, v, a are measured along the curve (more on this soon)
")
26
2/44 The electronic trottle control of a model train is programmed so that the train speed varies with position as shown. Determine the time t required for the train to complete one lap. Area = vds Slope = dv/ds = Slope = Constant. =C = 50.8 s

27
Recommended Problem 2/29 2/36 2/46 2/58 slope =0 at both end

29
Kinematics of particles
How to describe this particle’s motion? Framework for describing the motion Reference Frame Path of the particle = “position vector” (start from some convenient point: reference point) (x,y) coord A' (r,q) coord from A to A' takes t second s r A q displacement ( in t ): O Reference Point Distant traveled: measured along the path, scalar You are going to learn: relative frame (x,y) coord n-t coord r-q coord
 (x,y) coord. A (r,q) coord. from A to A takes t second. s. r. A. q. displacement ( in t ): O. Reference. Point. Distant traveled: measured along the path, scalar. You are going. to learn: relative frame. (x,y) coord. n-t coord. r-q coord.")
30
2/3 Plane Curvilinear Motion
Motion of a particle along a curved path in a single plane (2D curve) = “position vector” (start from some convenient point: reference point) Reference Frame Path of the particle (x,y) coord from A to A' takes t second A' displacement of the particle during time t : (r,q) coord s r Distant traveled = s, measured along the path, scalar A q O Basic Concept: “time derivative of a vector” “Average Velocity” “(Instantaneous) Velocity”
 = position vector (start from some convenient point: reference point) Reference Frame. Path of the particle. (x,y) coord. from A to A takes t second. A displacement of the particle during time t : (r,q) coord. s. r. Distant traveled = s, measured along the path, scalar. A. q. O. Basic Concept: time derivative of a vector Average Velocity (Instantaneous) Velocity")
31
Speed and Velocity “(Instantaneous) Velocity” “(Instantaneous) Speed”
Path of the particle A' “(Instantaneous) Speed” s A O Path of the particle A O Velocity vector is tangent to the curve path
 Speed s. A. O. Path of the particle. A. O. Velocity vector is tangent to the curve path.")
32
Instantaneous Speed speed s
Path of the particle A' s A O Time rate of change of length of the position vector speed (r,q) coord r q
 coord. r. q.")
33
Acceleration “Average acceleration” “(Instantaneous) Acceleration”
Path of the particle Hodograph C Hodograph C A' A O “Average acceleration” “(Instantaneous) Acceleration” *** The velocity is always tangent to the path of the particle (frequently used in problems) while the acceleration is tangent to the hodograph (not very important) ***
 Acceleration *** The velocity is always tangent to the path of the particle (frequently used in problems) while the acceleration is tangent to the hodograph (not very important) ***")
34
Vector Equation and reference frame
Path of the particle Reference Frame A' s A Vector equation is in general form, not depending on used coordinate. O Rectangular: x-y Normal-Tangent: n-t Polar: r- Reference Frame (coordinate) Usage will depend on selection. More than one can be used At the same time. n-t rectangular r-q
 Usage will depend on selection. More than one can be used. At the same time. n-t. rectangular. r-q.")
35
Derivatives of Vectors
Derivatives of Vectors: Obey the same rules as they do for scalars

36
Derivatives of Vectors
Derivatives of Vectors: Obey the same rules as they do for scalars Path of the particle The reference frame Rectangular, x-y Normal-tangent, n-t Polar, r- depend on the problem considered Reference Frame A' Vector equation is in general form. No (detailed) coordinate is need. s A O
 coordinate is need. s. A. O.")
37
2/4 Rectangular Coordinates
Reference Frame O Path y Both “divided” particles, are moving in rectilinear motion O O x Correct? Basic Agreement: Direction of reference axis {x,y} do not change on time variation. A Rectilinear Motion in 2 perpendicular & independent axes.

38
Velocity is tangent to the path (= slope of curve path)
x O x rectilinear in 2 dimension, related which other via time. If given can you find rectilinear in x-axis rectilinear in y-axis Velocity is tangent to the path (= slope of curve path)
")
39
Common Cases Rectangular coordinates are usually good for problems where x and y variables can be calculated independently! From this, you can find “path” of particles Ex1) Given ax = f1(t) and ay = f2(t) Ex2) Given x = f1(t) and y = f2(t)
 Given ax = f1(t) and ay = f2(t) Ex2) Given x = f1(t) and y = f2(t)")
40
Projectile motion vx = (vo)x x = xo + (vo)xt
The most common case is when ax = 0 and ay = -g (approximation) x and y direction can be calculated independently Note: a = const x y v a=0 vy vo vx vx (vo)y = v0 sin g vy v (vo)x = v0 cos x-axis y-axis vx = (vo)x x = xo + (vo)xt ( in case of )
 x and y direction can be calculated independently. Note: a = const. x. y. v. a=0. vy. vo. vx. vx. (vo)y = v0 sin g. vy. v. (vo)x = v0 cos x-axis. y-axis. vx = (vo)x. x = xo + (vo)xt. ( in case of )")
41
y Determine the minimum horizontal velocity u that a boy can throw a rock at A to just pass B. x Note: rectilinear (a=const) (1) (2) (3) g it can be applied in both x and y direction If we use eq. (3) in the y-direction :
 (2) (3) g. it can be applied in both x and y direction. If we use eq. (3) in the y-direction :")
42
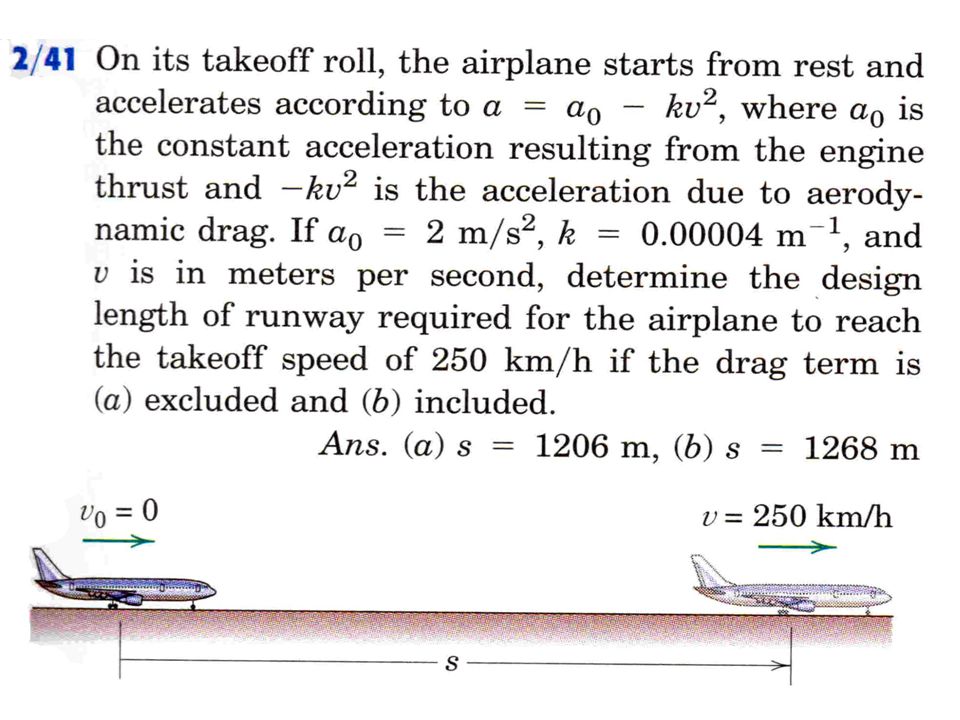
k : const Find x-,y-component of velocity and displacement as function of time , if the drag on the projectile results in an acceleration term as specified. Include the gravitational acceleration.

43
2/95 Find q which maximizes R (in term of v-zero and a)
Find R=R(q) y 2/95 Find q which maximizes R (in term of v-zero and a) x R=R(q) Find Rmax a
 y. 2/95 Find q which maximizes R (in term of v-zero and a) x. R=R(q) Find Rmax. a.")
44
H12-96 A boy throws 2 balls into the air with a speed v0 at the different angles {q1, q2} (q1 > q2). If he want the two ball collide in the mid air, what is the time delay between the 1st throw and 2nd throw. The first throw should be q1 or q2? q1 intersected point

45
2/84 Determine the maximum horizontal range R of the projectile and the corresponding launch angle q. this way? Yes! but why? How do you throw the ball? q=45 ? h h(q) R = R(h) Ceil’s height (5 m) is our limitation! R(q)
 R. = R(h) Ceil’s height (5 m) is our limitation! R(q)")
46
2/84 Determine the maximum horizontal range R of the projectile and the corresponding launch angle q. this way? Yes! but why? How do you throw the ball? q=45 ? h h(q) R = R(h) Ceil’s height (5 m) is our limitation! R(q)
 R. = R(h) Ceil’s height (5 m) is our limitation! R(q)")
47
2/84 Determine the maximum horizontal range R of the projectile and the corresponding launch angle q. this way?

48
H12/92 The man throws a ball with a speed v=15 m/s
H12/92 The man throws a ball with a speed v=15 m/s. Determine the angle q at which he should released the ball so that it strikes the wall at the highest point possible. The room has a ceiling height of 6m.

50
2/5 Normal and Tangential Coordinates (n-t)
Curves can be considered as many tangential circular arcs Fixed point on curve takes positive t in the direction of increasing s n t O Path: known and positive n toward the center of the curvature of the path s O n t n O t the origin and the axes move (and rotate) along with the path of particle Forward velocity and forward acceleration make more sense to the driver The driver is only aware of forward direction (t) and lateral direction (n). Brake and acceleration force are often more convenient to describe relative to the car (t-direction). Turning (side) force also easier to describe relative to the car (n-direction)
 along with the path of particle. Forward velocity and forward acceleration make more sense to the driver. The driver is only aware of forward direction (t) and lateral direction (n). Brake and acceleration force are often more convenient to describe relative to the car (t-direction). Turning (side) force also easier to describe relative to the car (n-direction)")
51
Normal and Tangential Coordinates (n-t)
generally, not total a Rectilinear Similarity n t O Path: known v,a s O n s t n O t s Consider: scalar variables (s) along the path (t direction) The reason why we define this coordinate similar to rectilinear motion 0 why? s measured along the path
 along the path (t direction) The reason why we define this coordinate. similar to rectilinear motion. 0 why s measured along the path.")
52
Velocity Small curves can be considered as circular arcs ** The velocity is always tangent to the path ** Path Velocity ( ): C Speed: A d ds = (d) A Fixed point on curve x y path
: C. Speed: A d ds. = (d) A. Fixed point on curve. x. y. path.")
53
Acceleration Path t C (similarly) db d A n ds = (d) A t n d d
 db d A n ds = (d) A t n d d")
54
Alternative Proof of Using x-y coordinate Path y C t n A O x

55
Understanding the equation
Path t n d C t A d n ds = (d) A an comes from changes in the direction of at comes from changes in the magnitude of
 A. an comes from changes in the direction of. at comes from changes in the magnitude of.")
56
What to remember v,a s s Rectilinear Similarity generally, not total a
by definition of n-t axis Rectilinear Similarity generally, not total a v,a s s x y path

57
Proof x y path y r db b+db ds dy b dx x

59
Direction of vt an an is always plus. Its direction is toward the center of curvature. B B Speed Increasing Speed Decreasing Inflection point Inflection point A A

60
n-t coordinates are usually good for problems where
“ Curvature path is known ” 1) distance along the curvature path (s) is concerned s 2) curvature radius (r) is concerned.
 distance along the curvature path (s) is concerned. s. 2) curvature radius (r) is concerned.")
62
Find r Find t a1 an ANS n g = 8.43 m/sec2
A rocket is traveling above the atmosphere such that g = 8.43 m/sec2. However because of thrust, the rocket has an additional acceleration component a1 = 8.80 m/sec2 and the velocity v = m/sec. Compute the radius of curvature and the rate of change of the speed Find r Find Here : t a1 30° an => 60° ANS n g = 8.43 m/sec2

63
1) the radius of curvature at A
The driver applies her brakes to produce a uniform deaccceleration. Her speed is 27.8 m/s at A and m/s at C. She experience a acceleration of 3 m/s^2 at A. Calculate 1) the radius of curvature at A 2) the acceleration at the inflection point B 3) the total acceleration at C Condition at A: Condition at B: Condition at C:
 the radius of curvature at A. 2) the acceleration at the inflection point B. 3) the total acceleration at C. Condition at A: Condition at B: Condition at C:")
64
Circular Motion (special case)
direction n? t? t v at n r an Particle is moving clockwise with speed increasing.

65
C and P shares the vertical velocity, acceleration.
2/123 Determine the velocity and the acceleration of guide C for a given value of angle q if t n q q q q q

66
Determine its velocity and acceleration at the instant t = 5s .
The motorcycle starts from A with speed 1 m/s, and increased its speed along the curve at t b Determine its velocity and acceleration at the instant t = 5s . 6.25 velocity is the vector (magnitude + direction)! what is x , when t = 5 ? 6.25 3.184 Numerical Method s=0, x=0
! what is x , when t = Numerical. Method. s=0, x=0.")
67
Determine its velocity and acceleration at the instant t = 5s .
The motorcycle starts from A with speed 1 m/s, and increased its speed along the curve at n t b 6.25 b Determine its velocity and acceleration at the instant t = 5s . 0.1

69
What is the velocity and acceleration of the plane?
2/6 Polar Coordinates ( r - ) Radar Coordinate t r q 0.0 25.1 32.0 0.1 26.2 35.0 0.2 26.1 39.0 0.3 24.8 40.0 0.4 23.2 37.0 0.5 25.2 Detect What is the velocity and acceleration of the plane? direction of = direction of positive r Path r direction of = direction of positive A r reference point reference axis
 Radar Coordinate. t. r. q Detect. What is the velocity and acceleration of the plane direction of = direction of positive r. Path. r. direction of = direction of positive A. r. reference point. reference axis.")
70
Polar Coordinates ( r - )
direction of = direction of positive r Path r direction of = direction of positive A r reference point reference axis d -r d

71
Velocity and Acceleration
q r Velocity and Acceleration ……….. the change of the length of the vector ………. the rotation of the vector Physical meaning will be discussed next page

72
Understanding the acceleration equation
Magnitude change of r (in r direction) Direction change of d (in direction) Magnitude change of (in direction) Direction change of Let’s look at how the velocities change (in -r direction)
 Direction change of. d (in direction) Magnitude change of. (in direction) Direction change of. Let’s look at how the velocities change. (in -r direction)")
73
Understanding the acceleration equation
Magnitude change of (in r direction) Direction change of (in direction) d Magnitude change of (in direction) Direction change of Let’s look at how the velocities change (in r direction)
 Direction change of. (in direction) d Magnitude change of. (in direction) Direction change of. Let’s look at how the velocities change. (in r direction)")
74
What is the velocity and acceleration of the plane?
Radar Coordinate t r q 0.0 25.1 32.0 0.1 26.2 35.0 0.2 26.1 39.0 0.3 24.8 40.0 0.4 23.2 37.0 0.5 25.2 Detect What is the velocity and acceleration of the plane? Detect

75
Circular Motion (Special Case)
r = const r a ar vr v r n t

76
n-t coord r- coord direction depends on its curvature path.
r- coord depend on { ref point, ref axis } Usually, Path need to be known no s

77
Problem types

79
2/145 The angular position of the arm is given by the shown function, where is in radians and t is in seconds. The slider is at r = 1.6 m (t = 0) and is drawn inward at the constant rate of 0.2 m/s. Determine the magnitude and direction (expressed by the angle relative to the x-axis) of the velocity and acceleration of the slider when t = 4. At t = 4s: v Ans y b a q q x Ans
 and is drawn inward at the constant rate of 0.2 m/s. Determine the magnitude and direction (expressed by the angle relative to the x-axis) of the velocity and acceleration of the slider when t = 4. At t = 4s: v. Ans. y. b. a. q. q. x. Ans.")
80
Motion of the sliding block P in the rotating radial slot is controlled by the power screw as shown. For the instant represented, Also, the screw turns at a constant speed giving For this instant, determine the magnitude of the velocity and acceleration of P

81
At the bottom of loop, airplane P has a horizontal velocity of 600 km/h and no horizontal acceleration. The radius of curvature of loop is 1200 m. determine the record value of for this instant. Use n-t coord to find v,a a v a v

82
The piston of the hydraulic cylinder gives pin A a constant velocity v = 1.5 m/s in the direction shown for an interval of its motion. For the instant when = 60°, determine 2D vector equation r-q coord x-y coord r 150 mm O A o 60 = q v q = 60° From viewpoint of r-q coord From viewpoint of r v x-y coord A A 150 150 mm mm o 60 = q o 60 = q O O acceleration = 0

83
The piston of the hydraulic cylinder gives pin A a constant velocity v = 1.5 m/s in the direction shown for an interval of its motion. For the instant when = 60°, determine 2D vector equation r-q coord x-y coord r 150 mm O A o 60 = q a=0 q = 60° From viewpoint of r-q coord From viewpoint of r v x-y coord A A 150 150 mm mm o 60 = q o 60 = q O O acceleration = 0

84
For the instant when = 60°, determine
The piston of the hydraulic cylinder has a constant velocity v = 1.5 m/s For the instant when = 60°, determine = 60° = 60° r-q coord x-y coord mag? mag? mag? mag=0 Only max 2 unknown to be solved x-y coord r-q coord

85
velocity mag? mag? mag? x-y coord r-q coord Alternate Solution ? q ?
= 60° Alternate Solution ? q ? Acceleration mag? mag? mag? x-y coord r-q coord

87
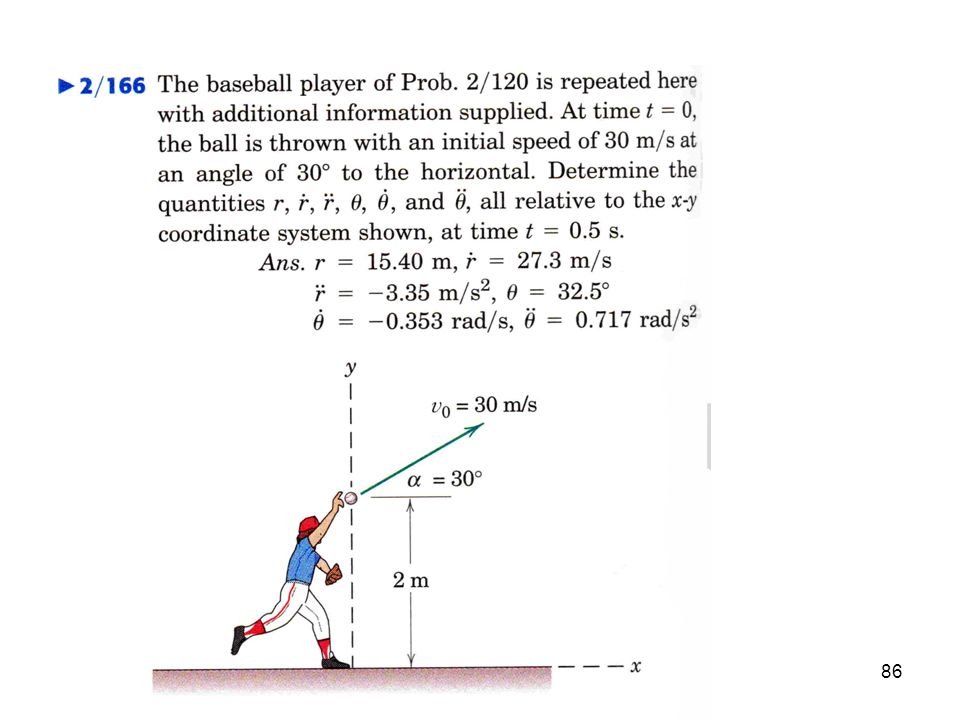
vy sx y vx sy r 2 x = 15.401 m = 32.495 deg = 27.337 m/s
q x-y coord At t = 0.5 s = m = m/s = m = rad/s = m/s = m/s

89
at r=0.5 Constrained motion
The slotted link is pinned at O, and as a result of the constant angular velocity 3 rad/s, it drives the peg P for a short distance along the spiral guide r = 0.4 q m, where q is in radians. Determine the velocity and acceleration of the particle at the instant it leaves the slot in the link, i.e. when r = 0.5 m Use r-q where reference-origin is at O, and reference axis is horizontal line. at r=0.5 Constrained motion

92
Summary: Three Coordinates (Tool)
Velocity Acceleration Reference Frame Path Reference Frame Path x x r y Observer’s measuring tool r y O Observer Observer (x,y) coord (n,t) coord velocity meter r (r,q) coord q
 coord. (n,t) coord. velocity meter. r. (r,q) coord. q.")
93
Choice of Coordinates Velocity Acceleration (x,y) coord (n,t) coord
Reference Frame Path Reference Frame Path x x r y Observer’s measuring tool r y O Observer Observer (x,y) coord (n,t) coord velocity meter r (r,q) coord q
 coord. (n,t) coord. velocity meter. r. (r,q) coord. q.")
95
Observer Translating No! “relative” “absolute”
“Translating-only Frame” will be studied today Two observers (moving and not moving) see the particle moving the same way? No! Observer’s Measuring tool Path Which observer sees the “true” velocity? Observer B (moving) (x,y) coord A both! It’s matter of viewpoint. This particle path, depends on specific observer’s viewpoint (n,t) coord velocity meter “relative” “absolute” Observer O (non-moving) Point: if O understand B’s motion, he can describe the velocity which B sees. r (r,q) coord q Two observers (rotating and non rotating) see the particle moving the same way? Rotating No! “translating” “rotating” “Rotating axis” will be studied later. Observer (non-rotating)
 see the particle moving the same way No! Observer’s. Measuring tool. Path. Which observer sees the true velocity Observer B. (moving) (x,y) coord. A. both! It’s matter of viewpoint. This particle path, depends on specific observer’s viewpoint. (n,t) coord. velocity meter. relative absolute Observer O. (non-moving) Point: if O understand B’s motion, he can describe the velocity which B sees. r. (r,q) coord. q. Two observers (rotating and non rotating) see the particle moving the same way Rotating. No! translating rotating Rotating axis will be studied later. Observer. (non-rotating)")
96
2/8 Relative Motion (Translating axises)
Sometimes it is convenient to describe motions of a particle “relative” to a moving “reference frame” (reference observer B) If motions of the reference axis is known, then “absolute motion” of the particle can also be found. A = a particle to be studied Reference frame O B = a “(moving) observer” Reference frame B A Motions of A measured by the observer at B is called the “relative motions of A with respect to B” Motions of A measured using framework O is called the “absolute motions” B O For most engineering problems, O attached to the earth surface may be assumed “fixed”; i.e. non-moving. frame work O is considered as fixed (non-moving)
 If motions of the reference axis is known, then absolute motion of the particle can also be found. A = a particle to be studied. Reference frame O. B = a (moving) observer Reference frame B. A. Motions of A measured by the observer at B is called the relative motions of A with respect to B Motions of A measured using framework O is called the absolute motions B. O. For most engineering problems, O attached to the earth surface may be assumed fixed ; i.e. non-moving. frame work O is considered as fixed (non-moving)")
97
Relative position If the observer at B use the x-y ** coordinate system to describe the position vector of A we have Y x y A Here we will consider only the case where the x-y axis is not rotating (translate only) B where = position vector of A relative to B (or with respect to B), and are the unit vectors along x and y axes (x, y) is the coordinate of A measured in x-y frame X O ** other coordinates systems can be used; e.g. n-t.
 B. where. = position vector of A relative to B (or with respect to B), and are the unit vectors along x and y axes. (x, y) is the coordinate of A measured in x-y frame. X. O. ** other coordinates systems can be used; e.g. n-t.")
98
Relative Motion (Translating Only)
x-y frame is not rotating (translate only) y A Y Direction of frame’s unit vectors do not change x B X O Notation using when B is a translating frame. Note: Any 3 coords can be applied to Both 2 frames.
 y. A. Y. Direction of frame’s. unit vectors do not change. x. B. X. O. Notation using when. B is a translating frame. Note: Any 3 coords can be applied to. Both 2 frames.")
99
Understanding the equation
Path Translation-only Frame! Observer B A O & B has a “relative” translation-only motion This particle path, depends on specific observer’s viewpoint Observer O reference framework O reference frame work B A Observer B (translation-only Relative velocity with O) Observer O Observer O B This is an equation of adding vectors of different viewpoint (world) !!! O
 Observer O. Observer O. B. This is an equation of adding vectors of different viewpoint (world) !!! O.")
100
The passenger aircraft B is flying with a linear motion to theeast with velocity vB = 800 km/h. A jet is traveling south with velocity vA = 1200 km/h. What velocity does A appear to a passenger in B ? Solution x y

101
Translational-only relative velocity
You can find v and a of B

102
v vA vB vA/B Velocity Diagram x y aA aB aA/B Acceleration Diagram x y

103
? Is observer B a translating-only observer B relative with O Yes Yes
No ?

104
To increase his speed, the water skier A cuts across the wake of the tow boat B, which has velocity of 60 km/h. At the instant when = 30°, the actual path of the skier makes an angle = 50° with the tow rope. For this position determine the velocity vA of the skier and the value of Relative Motion: (Cicular Motion) Consider at point A and B as r- coordinate system o 30 A A 30 m 10 o o B B 30 D ? ? O.K. M Point: Most 2 unknowns can be solved with 1 vector (2D) equation.
 Consider at point A and B. as r- coordinate system. o. 30. A. A. 30. m. 10. o. o. B. B. 30. D. O.K. M. Point: Most 2 unknowns can. be solved with. 1 vector (2D) equation.")
105
2/206 A skydriver B has reached a terminal speed
2/206 A skydriver B has reached a terminal speed The airplane has the constant speed and is just beginning to follow the circular path shown of curvature radius = 2000 m Determine (a) the vel. and acc. of the airplane relative to skydriver. (b) the time rate of change of the speed of the airplane and the radius of curvature of its path, both observed by the nonrotating skydriver.
 the vel. and acc. of the airplane relative to skydriver. (b) the time rate of change of the speed of the airplane and the radius of curvature of its path, both observed by the nonrotating skydriver.")
106
(b) the time rate of change of the speed of the airplane and the radius of curvature of its path, both observed by the nonrotating skydriver. t n

108
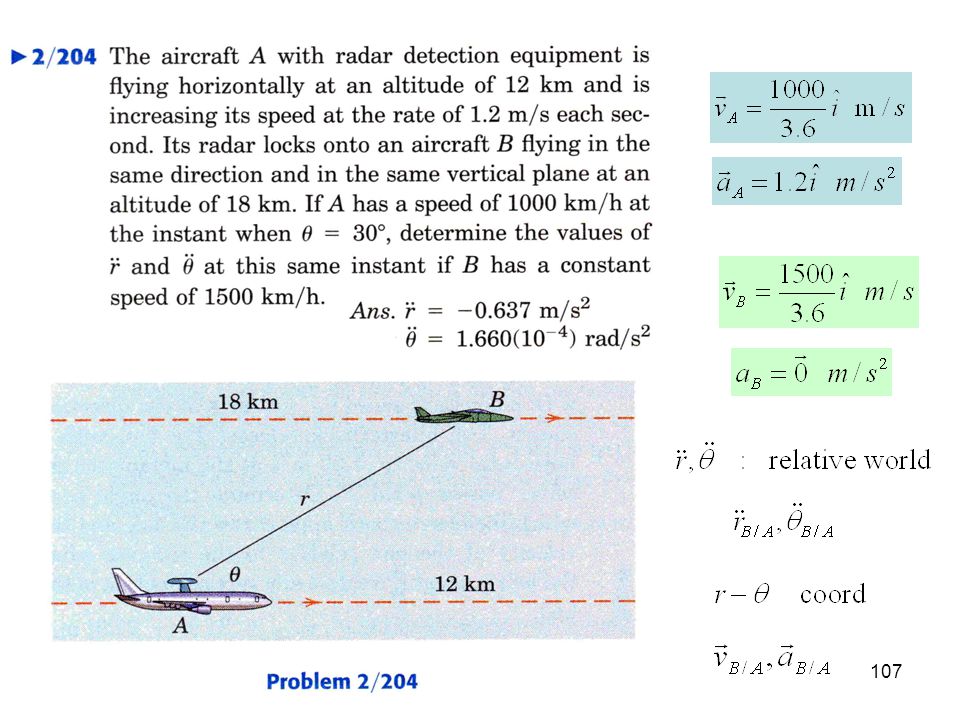
r v a

Similar presentations























>")







