Download presentation
Presentation is loading. Please wait.

1
ALİ RIZA GÜMÜŞ 14371962058 EVREN KÖYBAŞI 28853171050 VOJTECH HEMALA 90000004215 Eskişehir, 2013

2
PID Controller So, what is a Controller? Structure of a Controller Modes of Controllers (P, PI, PD, PID)
.")
3
PI Controller PI controller will eliminate forced oscillations and steady state error resulting in operation of on-off controller and P controller respectively. However, introducing integral mode has a negative effect on speed of the response and overall stability of the system. Thus, PI controller will not increase the speed of response. This problem can be solved by introducing derivative mode which has ability to predict what will happen with the error in near future and thus to decrease a reaction time of the controller.

4
DISCRETIZING A PID CONTROLLER

5
Development of discrete-time PID controller

6
Transforming method

7
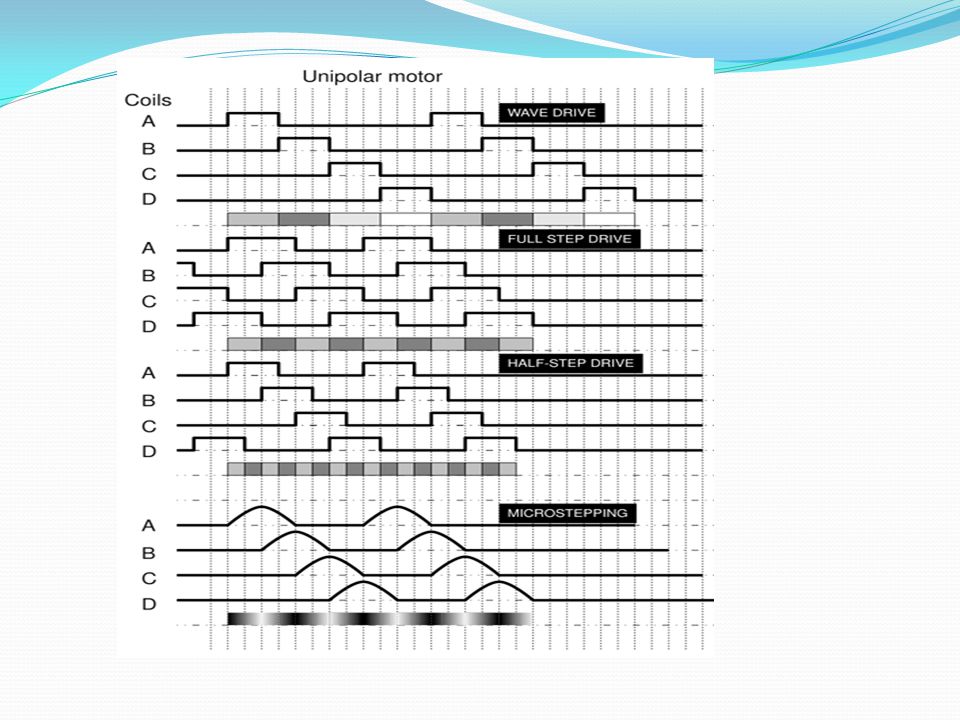
A stepper motor is a brushless DC electric motor that divides a full rotation into a number of equal steps

8
Motors definitions Step motors are seperated two main part unipolar and bipolar steppers motor.

9
Unipolar & Bİpolar A unipolar stepper motor has one winding with center tap(common wire) per phase In bipolar motors have a single winding per phase
 per phase In bipolar motors have a single winding per phase")
10
Operation of stepper motors To operate step motors, you must apply pulse to each coil in different phase. Driving this type of motor is a bit different from the others

12
Stepper motor positioning All dc servo motors we can take position info by connecting the potentiometer to its shaft In step motor rotates step by step, because of this we can divide the pot partially to determine the each step.It means each step has a voltage value.

13
Analog & Digital Operations In PLC s7 200 cpu 224 xp all operations can be made. First of all we are looking some useful code for this PLC. Then we will see the example of its application

14
Useful Codes BCDI OUT : Convert BCD to Integer IBCD OUT: Convert Integer to BCD BTI IN, OUT Convert Byte to Integer ITB IN, OUT Convert Integer to Byte ITD IN, OUT Convert Integer to Double Integer DTI IN, OUT Convert Double Integer to Integer DTR IN, OUT Convert DWord to Real

15
Online Subtract Operation In this example lots of operatıons are used. The main idea is : To observe the analog output voltage of PLC when we apply desired input voltage We can follow these steps to solce

17
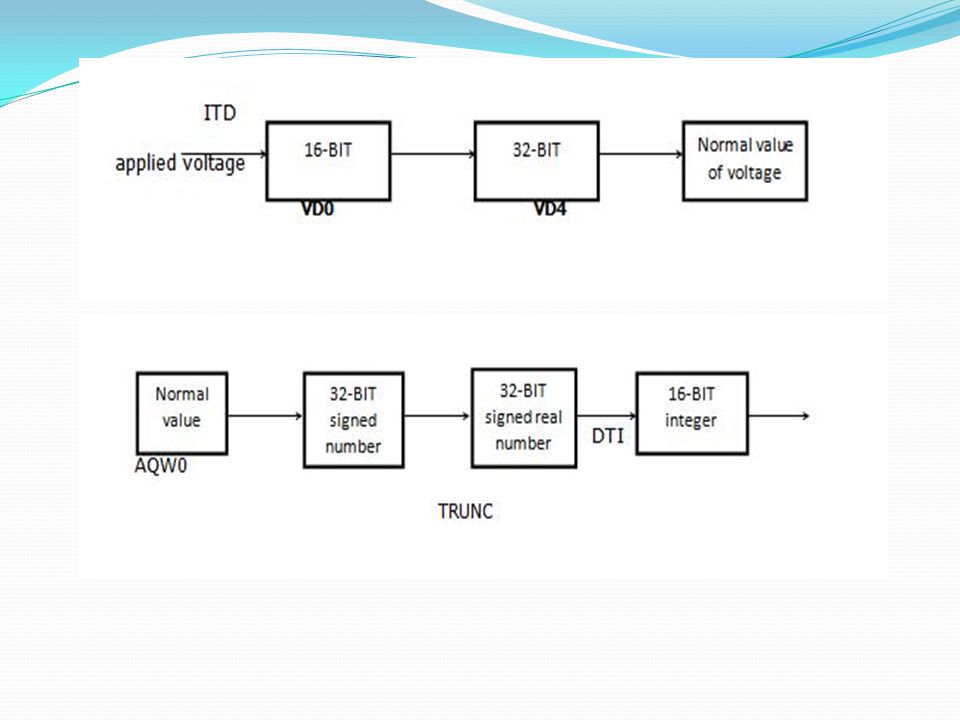
Example e.g. : Choose a reference voltage as 2,4 V.Then apply a arbitrary voltage.When you measure the analog output of PLC, you will see the voltage “applied voltage – reference (2,4 V)”. When you change the input, the output will change as proportional. SM0.0 MOVR2.4, VD0// VD0=2,4 V REFERENCE ITDAIW0,VD4 DTRVD4,VD4//INPUT 32 BIT REAL NUMBER
 . When you change the input, the output will change as proportional. SM0.0 MOVR2.4, VD0// VD0=2,4 V REFERENCE ITDAIW0,VD4 DTRVD4,VD4//INPUT 32 BIT REAL NUMBER.")
18
Last page /R3276,8,VD4 MOVRVD0,AC0 //AC0=2,4 -RVD0,AC0//AC0=AC0-VD0 *R3276,8, AC0 TRUNCAC0,VD8 DTIVD8,AQW0// ANALOG OUTPUT

Similar presentations

>")

 f(x,u) u x f(x, (x) x. Example: Using feed-forward, what should be canceled?>")
>")

 Conversion An overview of A/D techniques.>")




 No.>")







