Download presentation
Presentation is loading. Please wait.

1
CS171 Introduction to Computer Science II Graphs Strike Back

2
Homework 5! Emory Movie Database (EMD) Due Wednesday 4/7 11:59pm!
 Due Wednesday 4/7 11:59pm!")
3
Depth-First Search (DFS) – Non-recursive algorithm Push s onto a stack Repeat until the stack is empty: – remove the top vertex v. if not visited, mark as visited – add all v’s unvisited neighbors to the stack

8
DFS in real-life (xkcd)
")
9
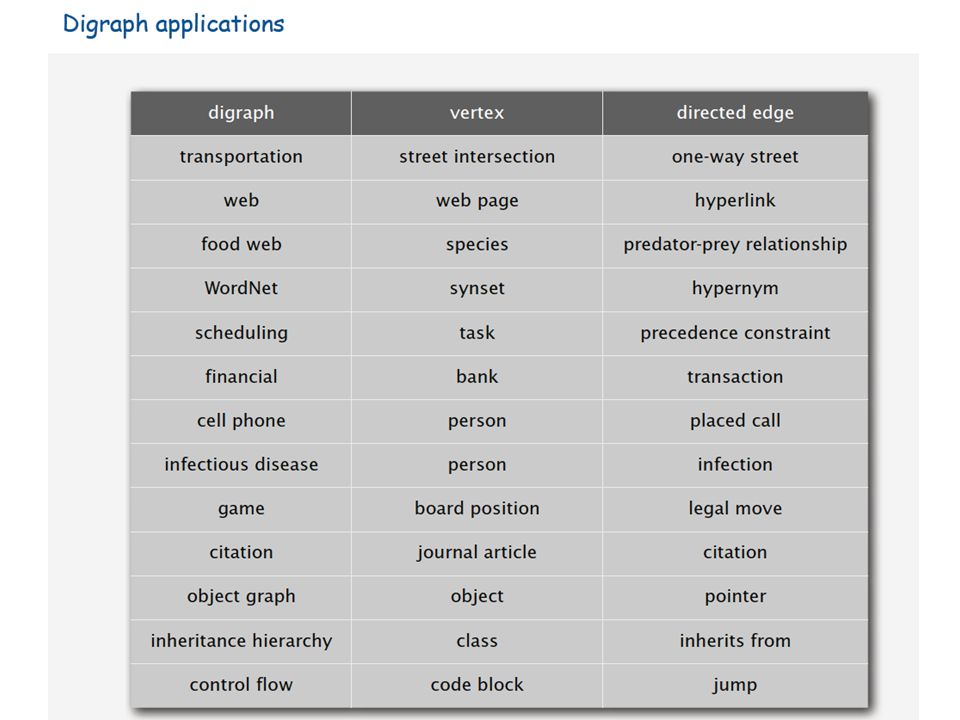
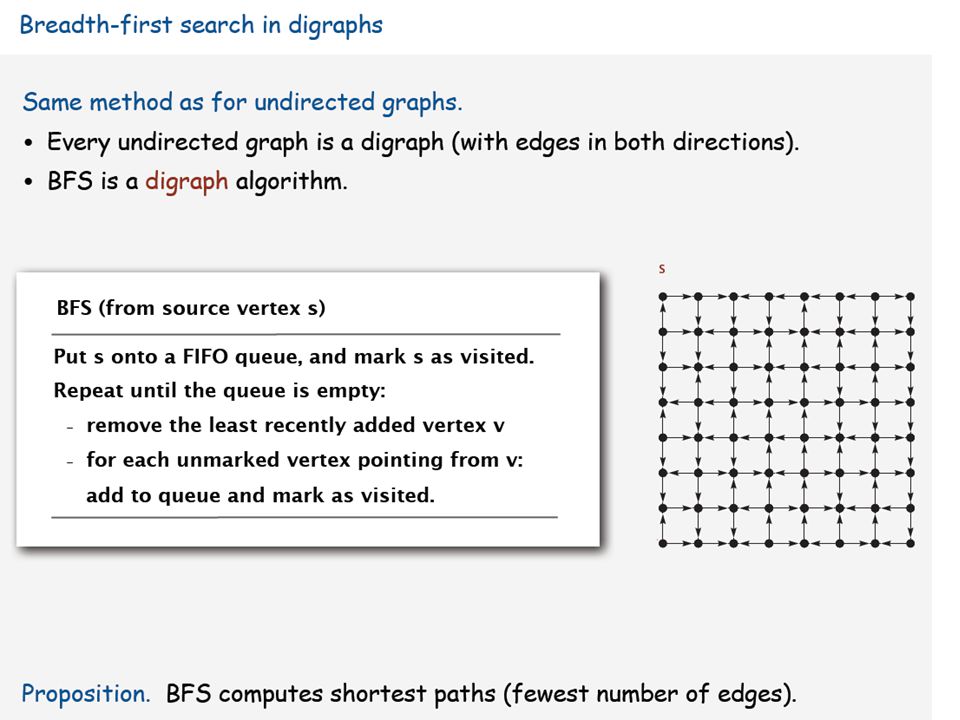
Graphs Definitions Implementation/Representation of graphs Undirected graphs – Algorithms Depth-first search Breadth-first search Path finding and shortest path Connected components – Applications

13
BFS example

14
Graphs Definitions Implementation/Representation of graphs Undirected graphs – Algorithms Depth-first search Breadth-first search Path finding and shortest path Connected components – Applications

23
Graphs Definitions Implementation/Representation of graphs Undirected graphs – Algorithms Depth-first search Breadth-first search Path finding and shortest path Connected components – Applications

25
Six degrees of separation Everyone is on average approximately six steps away, by way of introduction, from any other person on Earth Online social networks – Facebook: average distance is 4.74 (Nov 2011) – Twitter: average distance is 4.67 Erdos number Bacon number
 – Twitter: average distance is 4.67 Erdos number Bacon number")
28
Application: Web Search Engines i.Gather the contents of all web pages (using a program called a crawler or spider) ii.Organize the contents of the pages in a way that allows efficient retrieval (indexing) iii. Take in a query, determine which pages match, and show the results (ranking and display of results) A Search Engine does three main things:
 A Search Engine does three main things:.")
29
Basic structure of a search engine: Crawler disks Index indexing hooli.com Query: “computer” look up

30
Breadth-First Crawl: Basic idea: - start at a set of known URLs - explore in “concentric circles” around these URLs start pages distance-one pages distance-two pages

31
Graphs Definitions Implementation and representation of graphs Simple graphs – Depth-first search – Breadth-first search – shortest path – Connected components Directed graphs Weighted graphs Shortest path Minimum Spanning Tree

42
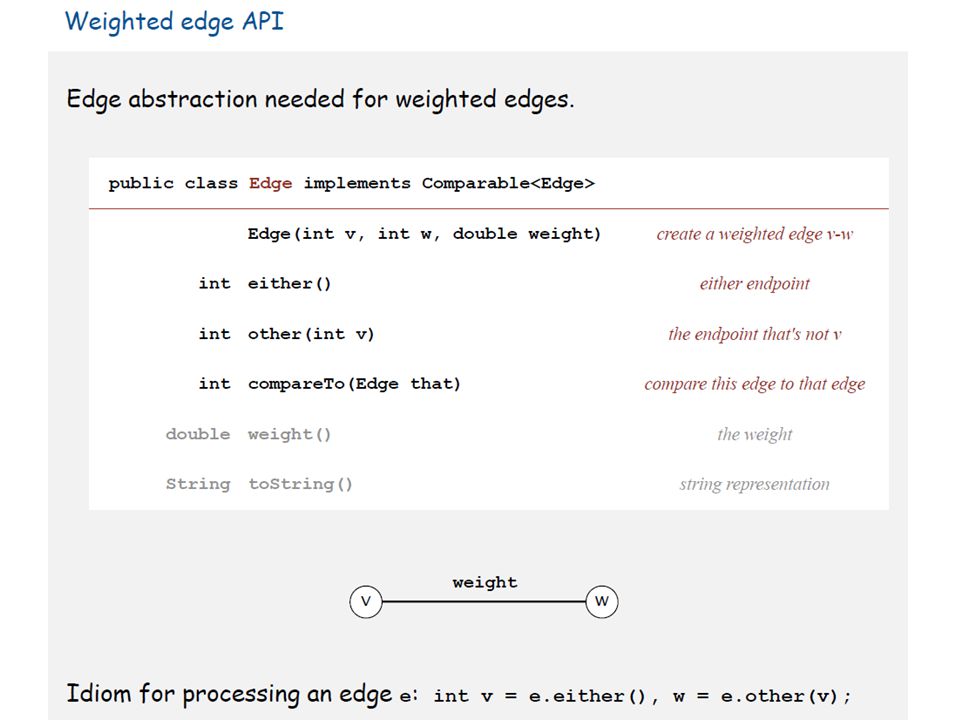
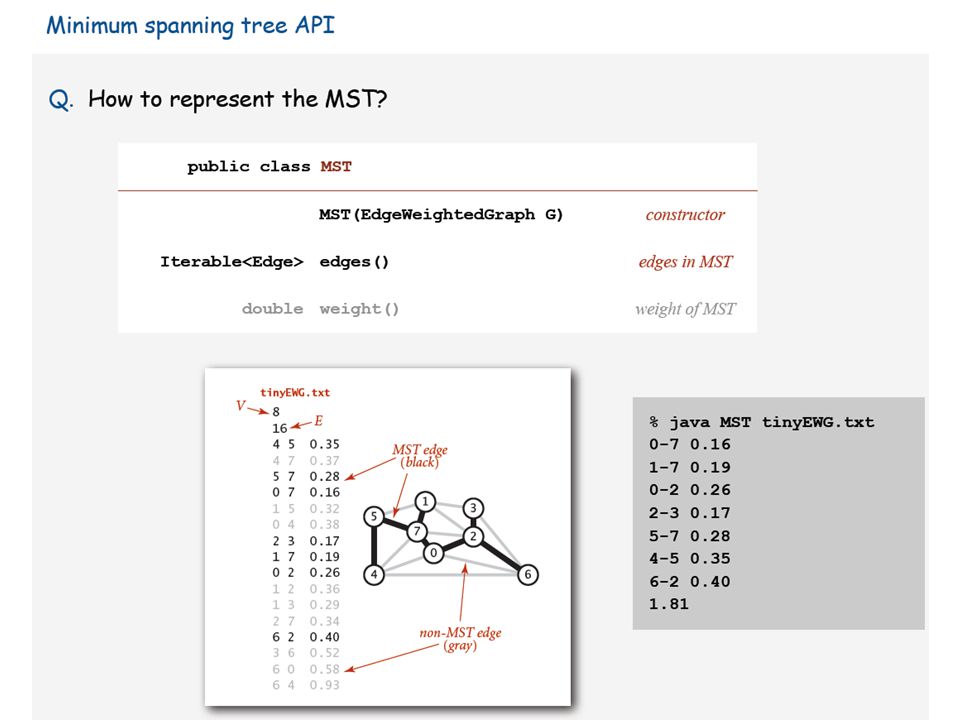
Edge-weighted graphs Each connection has an associated weight

49
Graphs Simple graphs Algorithms – Depth-first search – Breadth-first search – shortest path – Connected components Directed graphs Weighted graphs Shortest path Minimum Spanning Tree

52
Dijkstra’s Algorithm Finds all shortest paths given a source Solves single-source, single- destination, single-pair shortest path problem Intuition: grows the paths from the source node using a greedy approach

53
Shortest Paths – Dijkstra’s Algorithm Assign to every node a distance value: set it to zero for source node and to infinity for all other nodes. Mark all nodes as unvisited. Set source node as current. For current node, consider all its unvisited neighbors and calculate their tentative distance. If this distance is less than the previously recorded distance, overwrite the distance (edge relaxation). Mark it as visited. Set the unvisited node with the smallest distance from the source node as the next "current node" and repeat the above Done when all nodes are visited.
. Mark it as visited. Set the unvisited node with the smallest distance from the source node as the next current node and repeat the above Done when all nodes are visited..")
54
Data structures Distance to the source: a vertex-indexed array distTo[] such that distTo[v] is the length of the shortest known path from s to v Edges on the shortest paths tree: a parent- edge representation of a vertex-indexed array edgeTo[] where edgeTo[v] is the parent edge on the shortest path to v
![Data structures Distance to the source: a vertex-indexed array distTo[] such that distTo[v] is the length of the shortest known path from s to v Edges on the shortest paths tree: a parent- edge representation of a vertex-indexed array edgeTo[] where edgeTo[v] is the parent edge on the shortest path to v](http://images.slideplayer.com/14/4318865/slides/slide_54.jpg "Data structures Distance to the source: a vertex-indexed array distTo[] such that distTo[v] is the length of the shortest known path from s to v Edges on the shortest paths tree: a parent- edge representation of a vertex-indexed array edgeTo[] where edgeTo[v] is the parent edge on the shortest path to v")
55
Dijkstra’s algorithm

59
Graphs Simple graphs Algorithms – Depth-first search – Breadth-first search – shortest path – Connected components Directed graphs Weighted graphs Shortest path Minimum Spanning Tree

60
Depth-First Search (DFS) – Nonrecursive algorithm Push s onto a stack Repeat until the stack is empty: – remove the top vertex v, if not visited, mark as visited – add all v’s unvisited neighbors to the stack
 – Nonrecursive algorithm Push s onto a stack Repeat until the stack is empty: – remove the top vertex v, if not visited, mark as visited – add all v’s unvisited neighbors to the stack")
62
Shortest Paths – Dijkstra’s Algorithm Assign to every node a distance value: set it to zero for source node and to infinity for all other nodes. Mark all nodes as unvisited. Set source node as current. For current node, consider all its unvisited neighbors and calculate their tentative distance. If this distance is less than the previously recorded distance, overwrite the distance (edge relaxation). Mark it as visited. Set the unvisited node with the smallest distance from the source node as the next "current node" and repeat the above Done when all nodes are visited.
. Mark it as visited. Set the unvisited node with the smallest distance from the source node as the next current node and repeat the above Done when all nodes are visited..")
63
Bonus Question Adjacency list A -- B, D B -- C C -- E, G D -- E, F E -- B F -- G G -- E Show the sequence of vertices visited using BFS and DFS Show the shortest path length (and path) from A to each vertex
 from A to each vertex")
64
MapQuest 10 15 20 ? 15 5 18 25 33 Shortest path for a single source-target pair Dijkstra algorithm can be used

65
Better Solution: Make a ‘hunch’! Use heuristics to guide the search – Heuristic: estimation or “hunch” of how to search for a solution We define a heuristic function: h(n) = “estimate of the cost of the cheapest path from the starting node to the goal node”
 = estimate of the cost of the cheapest path from the starting node to the goal node .")
66
The A* Search A* is an algorithm that: – Uses heuristic to guide search – While ensuring that it will compute a path with minimum cost A* computes the function f(n) = g(n) + h(n) “actual cost” “estimated cost”
 = g(n) + h(n) actual cost estimated cost")
67
A* f(n) = g(n) + h(n) – g(n) = “cost from the starting node to reach n” – h(n) = “estimate of the cost of the cheapest path from n to the goal node” 10 15 20 15 5 18 25 33 n g(n) h(n)
 = g(n) + h(n) – g(n) = cost from the starting node to reach n – h(n) = estimate of the cost of the cheapest path from n to the goal node n g(n) h(n)")
68
Properties of A* A* generates an optimal solution if h(n) is an admissible heuristic and the search space is a tree: – h(n) is admissible if it never overestimates the cost to reach the destination node A* generates an optimal solution if h(n) is a consistent heuristic and the search space is a graph: –h(n) is consistent if for every node n and for every successor node n’ of n: h(n) ≤ c(n,n’) + h(n’) n n’ d h(n) c(n,n’) h(n’) If h(n) is consistent then h(n) is admissible Frequently when h(n) is admissible, it is also consistent
 is an admissible heuristic and the search space is a tree: – h(n) is admissible if it never overestimates the cost to reach the destination node A* generates an optimal solution if h(n) is a consistent heuristic and the search space is a graph: –h(n) is consistent if for every node n and for every successor node n’ of n: h(n) ≤ c(n,n’) + h(n’) n n’ d h(n) c(n,n’) h(n’) If h(n) is consistent then h(n) is admissible Frequently when h(n) is admissible, it is also consistent")
69
Admissible Heuristics A heuristic is admissible if it is optimistic, estimating the cost to be smaller than it actually is. MapQuest: h(n) = “Euclidean distance to destination” is admissible as normally cities are not connected by roads that make straight lines
 = Euclidean distance to destination is admissible as normally cities are not connected by roads that make straight lines.")
70
Project Option: Emory MapQuest Implement Dijkstra’s algorithm for finding a route between two cities Bonus: A* algorithm

71
Graphs Simple graphs Algorithms – Depth-first search – Breadth-first search – shortest path – Connected components Directed graphs Weighted graphs Shortest path Minimum Spanning Tree

76
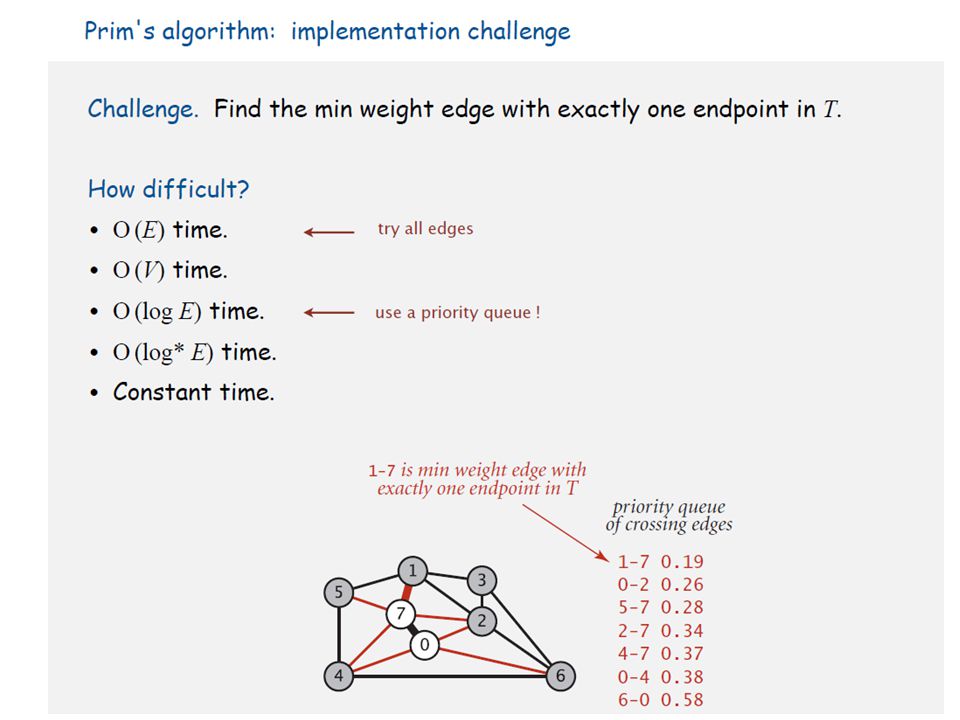
Applications Phone/cable network design – minimum cost Approximation algorithms for NP-hard problems

Similar presentations

















































 1 Fasilkom UI Ruli Manurung (Fasilkom UI)IKI10100: Lecture10.>")
 of the depth-first search. Topological.>")






 GRAPH. Introduction of Graph A graph G consists of two things: 1.A set V of elements called nodes(or points or.>")



 where V is a set of vertices and E is a set of edges, An edge is a pair (u,v) where u,v V. If.>")
