Download presentation
Presentation is loading. Please wait.

1
Resolving Surface Collisions through Intersection Contour Minimization Pascal Volino Nadia Magnenat-Thalmann MIRALab, University of Geneva SIGGRAPH 2006

2
Abstract Advanced methods are need for CD To recovery intersecting surfaces Not rely on intersection regions More broader application Much simpler to implement

3
Outline Introduction Related Work Description of the Method Results Conclusions

4
Introduction

5
Early CD for cloth are restricted for cloth and volumes Methods for ensuring adequate constrains are complex

6
Related Work

7
Not only prevent but also repair the intersections Common approach is to identify the “collision regions” by Volino et al.[1995] Retain a constant orientation with detection Impractical to implement
![Not only prevent but also repair the intersections Common approach is to identify the collision regions by Volino et al.[1995] Retain a constant orientation with detection Impractical to implement](http://images.slideplayer.com/14/4258391/slides/slide_7.jpg "Not only prevent but also repair the intersections Common approach is to identify the collision regions by Volino et al.[1995] Retain a constant orientation with detection Impractical to implement")
8
Related Work Simpler approaches preventing surface intersections to occur or spread Baraff et al [2003] use “flypapering” Bridson et al [2003] preserve wrinkle patterns Bridson et al [2002] the most comprehensive way
![Related Work Simpler approaches preventing surface intersections to occur or spread Baraff et al [2003] use flypapering Bridson et al [2003] preserve wrinkle patterns Bridson et al [2002] the most comprehensive way](http://images.slideplayer.com/14/4258391/slides/slide_8.jpg "Related Work Simpler approaches preventing surface intersections to occur or spread Baraff et al [2003] use flypapering Bridson et al [2003] preserve wrinkle patterns Bridson et al [2002] the most comprehensive way")
9
Related Work A major contribution by Baraff et al [2003] Global Intersection Analysis method Track intersections by identifying closed contour Establish orientation correspondence Apply collision response method Major restriction Necessity of closed intersection contour
![Related Work A major contribution by Baraff et al [2003] Global Intersection Analysis method Track intersections by identifying closed contour Establish orientation correspondence Apply collision response method Major restriction Necessity of closed intersection contour](http://images.slideplayer.com/14/4258391/slides/slide_9.jpg "Related Work A major contribution by Baraff et al [2003] Global Intersection Analysis method Track intersections by identifying closed contour Establish orientation correspondence Apply collision response method Major restriction Necessity of closed intersection contour")
10
Related Work A major contribution by Baraff et al [2003] Global Intersection Analysis method Track intersections by identifying closed contour Establish orientation correspondence Apply collision response method Major restriction Necessity of closed intersection contour
![Related Work A major contribution by Baraff et al [2003] Global Intersection Analysis method Track intersections by identifying closed contour Establish orientation correspondence Apply collision response method Major restriction Necessity of closed intersection contour](http://images.slideplayer.com/14/4258391/slides/slide_10.jpg "Related Work A major contribution by Baraff et al [2003] Global Intersection Analysis method Track intersections by identifying closed contour Establish orientation correspondence Apply collision response method Major restriction Necessity of closed intersection contour")
11
Goal To overcome these limitations Intersection region Non-consist constrains Impractical to implement Minimizing the length of the intersections contour Rather than spending time to identifying colliding surface regions

12
Description of the Method Minimizing Edge-Polygon Intersections Integration with Collision response The local and the Global Scheme

13
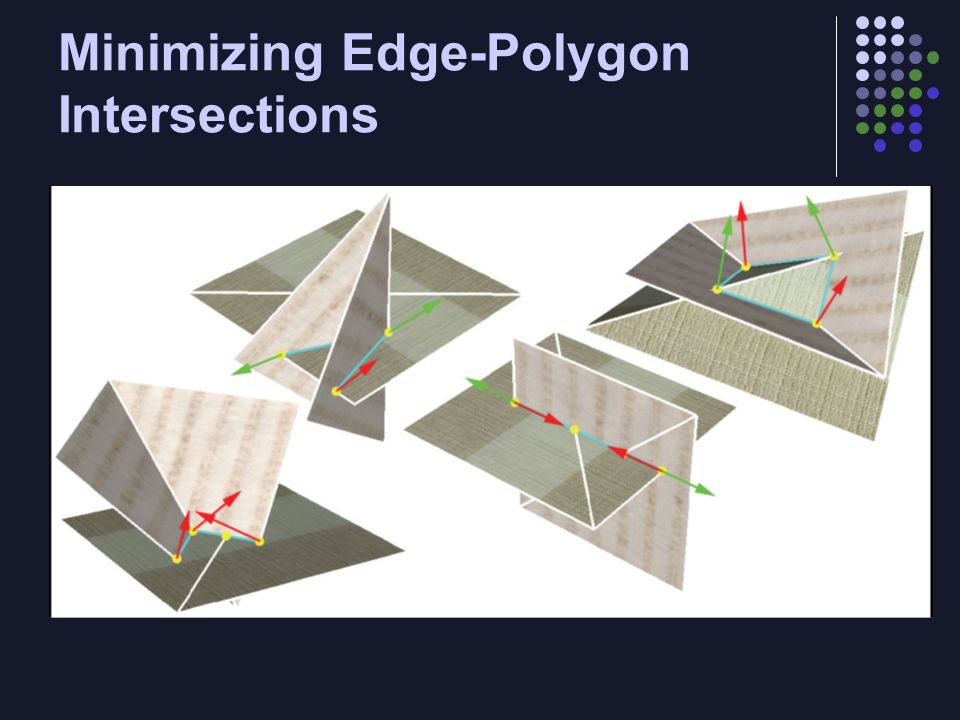
Description of the Method Resolution scheme Define a collision scheme that induce a relative displacement So as to reduce the length of the intersection contour disappearance of the surface intersection

14
Minimizing Edge-Polygon Intersections

16
Integration with Collision response Integrating the effects of collision in the simulation Defining an “interaction vector” H from the gradient G H should on the same direction of G Their norm should be related

17
The local and the Global Scheme Sometimes not efficient if the contour is already quite straight or the actions are the largest on the region

18
Results Some Test Examples Performance and Limitations

19
Results Integrated in a cloth simulation engine Based on particle systems for accurate representation Broad-phase CD using AABB hierarchies Collisions are detected through edge-polygon intersections

20
Some Test Examples Untangling Cloth Surfaces Local scheme works poorly in this context Between 0.4 and 0.2 sec per iteration

21
Some Test Examples Robustness Test Randomly ignoring 50% of all collisions detected Local scheme is fairly efficient in this context

22
Some Test Examples The Ribbon Simulation 80000 polygons of the ribbon, took roughly 3 to 30 sec per iteration Shear deformations often break the simulation

23
Some Test Examples Garment Simulation Several layers of cloth Not always accurate

24
Performance and Limitations The number of edge-polygon intersections remains very low Compared to the number of regular collisions between mesh elements Resolve intersections progressively along the simulation is more efficient

25
Performance and Limitations In few configurations, the algorithm converges to a local minimum Combined with intersection region identify

26
Conclusions

27
The method is general and not suffer from the limitations of existing method Simple to implement The local scheme only relies on a simple geometrical computation The global scheme efficiently solve very large surface intersections easily be combined with most usual approaches for CD

28
Question?

Similar presentations


















 Hasselt University.>")
