Download presentation
Presentation is loading. Please wait.

1
http://www.researchandpractise.com/vrp/ http://www.iro.umontreal.ca/~ferland/

2
Capacitated Open Pit Mining Problem Semya Elaoud, Sfax University (Tunesia) Jacques A. Ferland, University of Montreal Jonathan Bellemare, University of Montreal Jorge Amaya, University of Chile

4
RIOT Mining Problem web site: http://riot.ieor.berkeley.edu/riot/Applications/OPM/OPMInteractive.html Maximal Open Pit problem: to determine the maximal gain expected from the extraction the net value of extracting block i objective function

5
Maximal pit slope constraints to identify the set B i of predecessor blocks that have to be removed before block i

6
Maximal pit slope constraints to identify the set B i of predecessor blocks that have to be removed before block i

7
Maximal pit slope constraints to identify the set B i of predecessor blocks that have to be removed before block i

9
Use the open pit graph G = (V, A) to specify the maximal pit slope constraints The maximal pit slope constraints:
 to specify the maximal pit slope constraints The maximal pit slope constraints:")
10
(MOP) equivalent to determine the maximal closure of G = (V, A) Equivalent to determine the minimum cut of the associated Picard’s graph where The maximal open pit is equal to N* = (S – {s})
 equivalent to determine the maximal closure of G = (V, A) Equivalent to determine the minimum cut of the associated Picard’s graph where The maximal open pit is equal to N* = (S – {s})")
12
Scheduling block extraction Account for operational constraints: C t the maximal weight that can be extracted during period t and for the discount factor during the extracting horizon: discount rate per period

13
the net value of extracting block i p i weight of block i N can be replaced by the maximal open pit N* = (S – {s})
")
14
Scheduling block extraction ↔ RCPSP Open pit extraction ↔ project Each block extraction ↔ activity Precedence relationship derived from the open pit graph

15
Scheduling block extraction ↔ RCPSP

17
Open pit extraction ↔ project Each block extraction ↔ activity Precedence relationship derived from the open pit graph Reward associated with activity (block) i depends of the extraction period t
 i depends of the extraction period t")
18
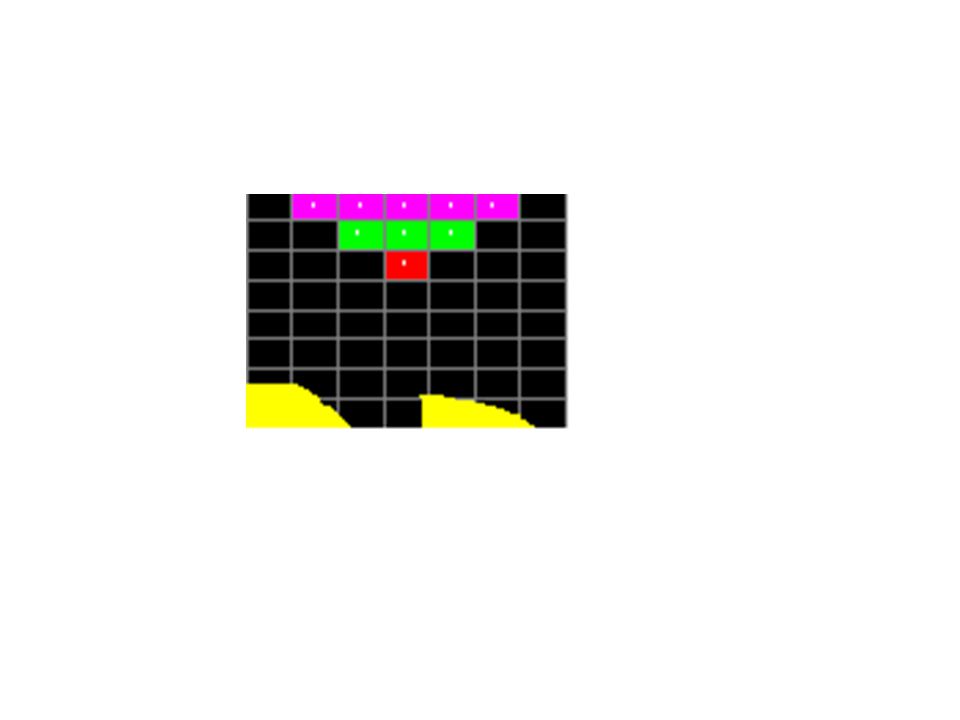
Solution encoding and decoding

19
Decoding a block list into a schedule Serial decoding Initiate the first extraction period t = 1 During any period t: - The next block to be extracted is the first block in the rest of the block list (including the blocks not extracted yet) having all their predecessors already extracted such that the capacity C t is not exceeded by its extraction. Include this block in the newsol block list. - If no such block exists, then a new extraction period (t + 1) is initiated.
 is initiated..")
20
Metaheuristic solution approach

21
Outline of the solution approach

22
Initial solution

37
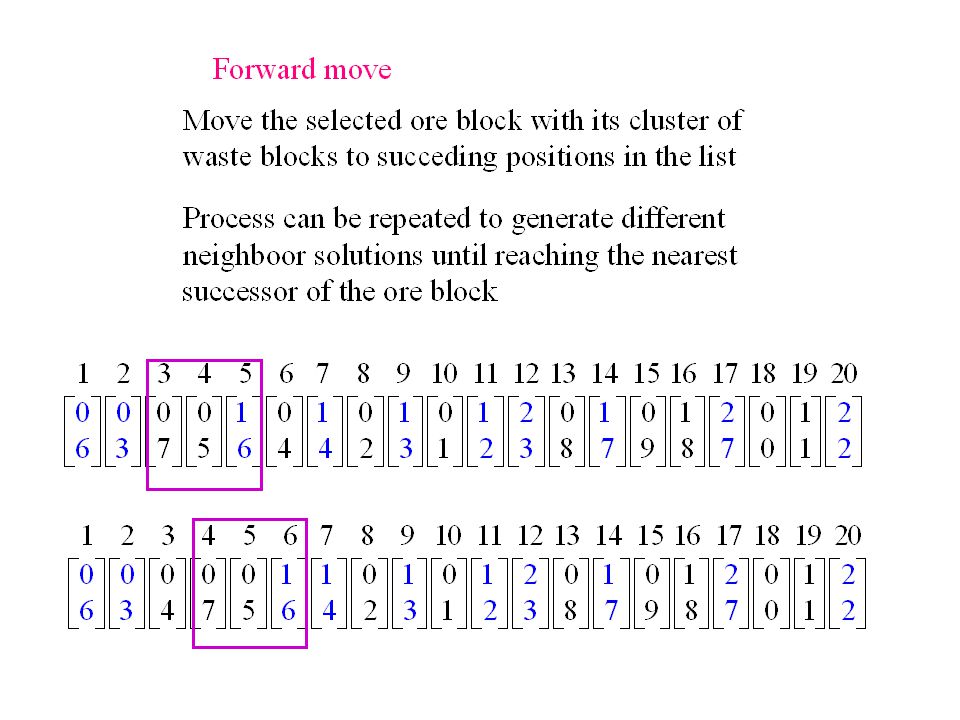
First neighborhood moving one ore block

41
Unique ore block process on cluster i

42
Second neighborhood moving multiple ore blocks

44
Multiple ore block process on cluster i

45
Implementation of a metaheuristic procedure

46
Numerical experimentation

47
Second encoding of the solution and Particle Swarm Solution Approach

48
Genotype representation of solution Similar to Hartman’s priority value encoding for RCPSP priority of scheduling block i extraction

49
Decoding of a representation PR into a solution x Serial decoding to schedule blocks sequentially one by one to be extracted To initiate the first extraction period t = 1: remove the block among those having no predecessor (i.e., in the top layer) having the highest priority. During any period t, at any stage of the decoding scheme: the next block to be removed is one of those with the highest priority among those having all their predecessors already extracted such that the capacity C t is not exceeded by its extraction. If no such block exists, then a new extraction period (t + 1) is initiated.
 is initiated..")
50
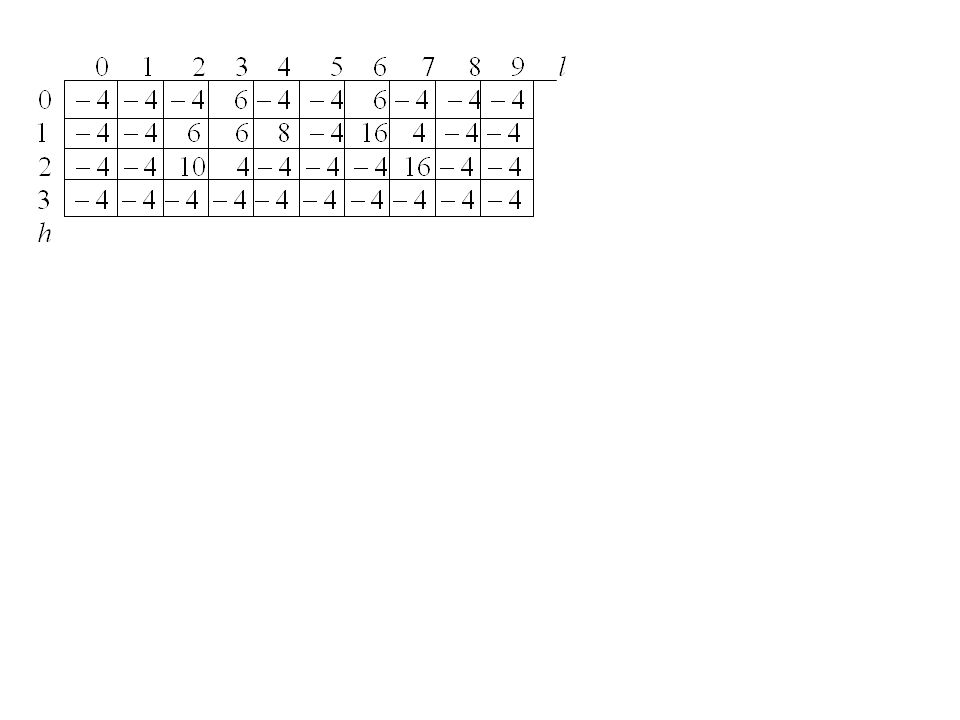
Priority of a block Consider its net value b i and impact on the extraction of other blocks in future periods Block lookahead value (Tolwinski and Underwood) determined by referring to the spanning cone SC i of block i
 determined by referring to the spanning cone SC i of block i")
52
Genotype priority vector generation Several different genotype priority vectors can be randomly generated with a GRASP procedure biased to give higher priorities to blocks i having larger lookahead values Several feasible solutions can be obtained by decoding different genotype vectors generated with the GRASP procedure.

53
Particle Swarm Procedure Evolutionary process evolving in the set of genotype vectors to converge to an improved feasible solution Initial population P of M genotype vectors (individuals) generated using GRASP Denote the best achievement of the individual k up to the current iteration the best overall genotype vector achieved up to the current iteration
 generated using GRASP Denote the best achievement of the individual k up to the current iteration the best overall genotype vector achieved up to the current iteration")
54
Particle Swarm Procedure Denote the best achievement of the individual k up to the current iteration the best overall genotype vector achieved up to the current iteration Modification of the individual vector k at each iteration

55
Particle Swarm Procedure Denote the best achievement of the individual k up to the current iteration the best overall genotype vector achieved up to the current iteration Modification of the individual vector k at each iteration

56
Numerical experimentation

Similar presentations


























>")








>")
Reduce error variance. 2)Remove sources of bias from experiment. 3)Obtain adjusted estimates of population means.>")


