Download presentation
Presentation is loading. Please wait.

1
How to be sure your robot will turn

2
My Name: Chris Hibner Mentor FRC 51 - Wings of Fire chiefdelphi.com: “Chris Hibner”

3
Who has taken the following courses? Physics Algebra Trigonometry Calculus

4
F = *N is the “coefficient of friction” and it depends on the materials in contact. M g N F

5
F (maximum friction force) = (coefficient of friction) * N (normal force) F = *N On a level surface, N = weight
 = (coefficient of friction) * N (normal force) F = *N On a level surface, N = weight")
6
Let’s say the mass weighs 150 lb and the coefficient of friction is 0.8. How much force is required to move the object? F = *N F = 0.8 * 150 lb F = 120 lb

7
The above example has one continuous contact area – what if there are multiple contact areas? Nf = W*(Lcom / L) Nr = W (1 – Lcom / L) W Nf Nr L Lcom
 Nr = W (1 – Lcom / L) W Nf Nr L Lcom.")
8
Nf = W*(Lcom / L) Nr = W (1 – Lcom / L) If Lcom is L/2, then Nf = Nr = W/2 If Lcom is L/3, then Nf = W/3 and Nr = 2W/3 W Nf Nr L Lcom
 Nr = W (1 – Lcom / L) If Lcom is L/2, then Nf = Nr = W/2 If Lcom is L/3, then Nf = W/3 and Nr = 2W/3 W Nf Nr L Lcom")
9
F = T / r F (force at edge of wheel) = T (torque) / r (radius of wheel) F T
 = T (torque) / r (radius of wheel) F T")
10
Simple answer: wheel “breaks free” and starts to slip. The force from the wheel to the ground: which direction does it point? Answer: in the direction of the force applied by the torque.

11
If there is significant deflection of the surface and/or interlock between mating surfaces, the simple friction model breaks down. Especially if interlock only occurs in one direction. In this case, the friction model does not work in the direction with interlock. The force in this direction is more of a normal force, and not a friction force. In the direction without interlock, the simple friction model still works well.

12
These slide side-to-side. They “push-off” with normal force fore-aft.

14
Link: http://www.real-world-physics- problems.com/physics-of-skiing.html

15
The physics of skiing is not worth learning for FIRST robots. A model can be created from the simple friction model that is “close enough”. Just use different “friction coefficients” in the different directions Dynamically changing friction coefficients is a common way to model complex surface interaction. The ski physics was brought up to show a point: when interlock occurs, slipping can occur in one direction without affecting the friction in the transverse direction.

16
Title: Drive Train Basics (How to be sure your robot will turn) Link: http://www.chiefdelphi.com/media/papers/ 1443 http://www.chiefdelphi.com/media/papers/ 1443
 Link:")
17
Prior to 2003, there were no rules on materials that interact with the carpet. Metal to carpet contact was common, and cleated wheels and treads were also common. Omni-wheels were very common

18
Cleated wheels and treads follow skiing physics very closely. This is due to “trenching” of the cleat in between the carpet fibers. The radius in the transverse direction moves the fibers out of the way in that direction (see picture on previous slide). Starting in 2003, FIRST outlawed cleated wheels. Wheels with symmetric friction are now the norm.
. Starting in 2003, FIRST outlawed cleated wheels. Wheels with symmetric friction are now the norm..")
19
The 2003 paper is entirely accurate for symmetric wheels. If you design your drive train using the 2003 paper – it will still turn. The 2003 paper is overly conservative for symmetric wheels. If you want to design at the limit of turning, you can be more accurate. However, I wouldn’t recommend designing at the turning limit.

20
Assumptions for the simple case: Same torque at all 4 wheels COM is left/right centered Same wheels at all 4 corners, and friction is same in all directions. Lwb Ltw Lcom

21
General case: (See appendix for derivation)
")
22
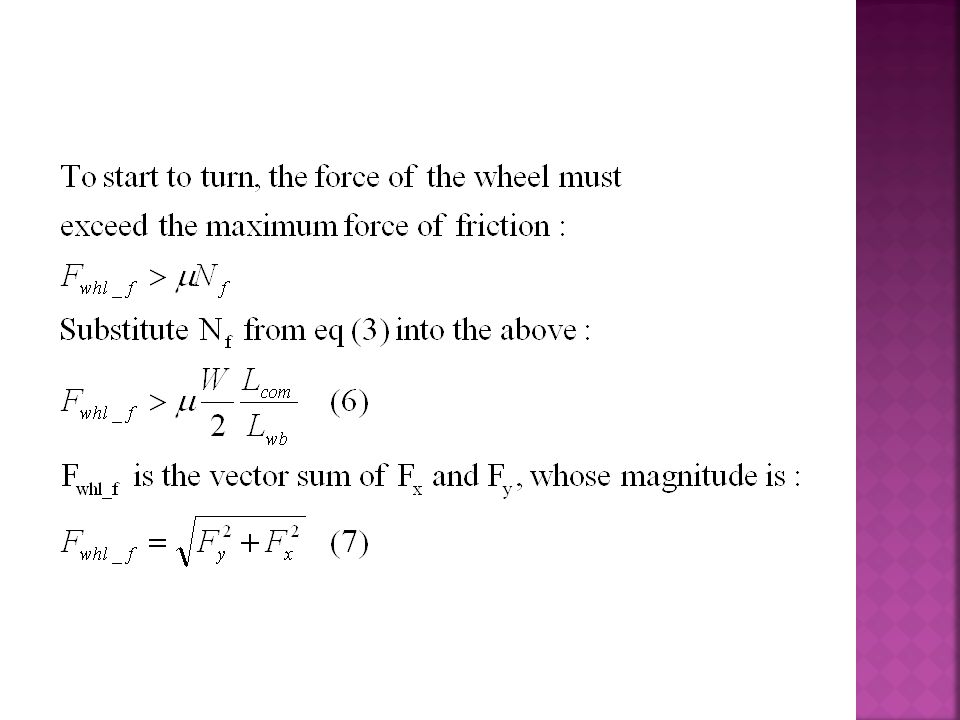
Worst case – Lcom is Lwb/2:

23
To be sure your robot will turn: 1. Use the 2003 paper or the above friction equation to determine the force at the wheel needed to make the robot turn. 2. Know the stall torque of your motor. Better yet, use the motor torque at peak power. 3. Twhl = Ffrict * Rwhl (Torque at the wheel = friction force * wheel radius) 4. GearRatio = Tmotor / Twhl Don’t forget to account for losses due to gearing (10% per stage is a good rule), and add some safety margin.
 4. GearRatio = Tmotor / Twhl Don’t forget to account for losses due to gearing (10% per stage is a good rule), and add some safety margin..")
24
Introduce the students to Led Zeppelin. Just kidding. What causes it? Ever see a stop sign flutter in the wind? Wind force Spring torque (from sign post)
.")
25
How road sign flutter relates to a robot. How to stop it: increase torsional stiffness of the frame. Gussets closed box sections (not open channel sections) Truss shapes F F Spring torque From Frame Top view of frame:
 Truss shapes F F Spring torque From Frame Top view of frame:.")
26
There is no substitute for doing a gear calculation. Wider is better – the higher the Ltw/Lwb ratio is, the easy is will be for your robot to turn. But be careful – you don’t want your robot to flip over during acceleration. Ways to compromise: 1. 6 wheel drive with dropped center wheel 2. 8 wheel drive with dropped center 4 COM at the center of the robot is worst for turning. Moving the COM forward or rearward helps the robot turn.

27
If all else fails: Consider using high friction wheels on one end of the robot, and low friction wheels on the other end. Consider wheels with asymmetric friction: 1. Omni wheels 2. Consider machining a radius or slope to the side of hard wheels:

28
2Nf 2Nr L Lcom W

29
Solve equation 2 for Nf: Substitute into eq 1 and solve for Nr:

30
Lwb Ltw Lcom Fy Fx

33
JVN mechanical design calculator: http://www.chiefdelphi.com/media/papers/ 2755 http://www.chiefdelphi.com/media/papers/ 2755 apalrd Battery Voltage in Robot Drivetrain Simulation and Modeling: http://www.chiefdelphi.com/media/papers/ 2750 http://www.chiefdelphi.com/media/papers/ 2750

Similar presentations