Download presentation
Presentation is loading. Please wait.

1
Correcting Projector Distortions on Planar Screens via Homography
Daniel Hirt

2
Projector Devices Today
More affordable Smaller Some are even low-cost and compact

3
A Common Setup of a Projector Device
Mounted on ceiling

4
Another Common Setup Placed on table

5
Deviations from Recommeded Setup
Cause distortions Mild deviations may cause mild distortions, oftenly referred to as “keystone effect”

6
Basic Distortion Correction
Most projectors offer a limited range of methods to correct a distorted image. Usually only “keystone correction” is available, and require manual operation.

7
Problem Solved? “Keystone Correction” features in projectors does not overcome all distortions. Some distortions might be caused by extreme conditions of projector placement.

8
Projection Correction On Planar Screens
Recall the perspective projection formula, give a 3D point (x,y,z). We can use this to correct our image, but... We do not have any 3D information
. We can use this to correct our image, but... We do not have any 3D information.")
9
Approaches to Get 3D Information
Rectified Calibrated Stereo (two cameras) Determine calibration values for: Projector Camera Each of the above can give enough information for us to correct the distorted image
 Determine calibration values for: Projector. Camera. Each of the above can give enough information for us to correct the distorted image.")
10
However, We Need to Also Know
Intrinsic Parameters Focal length Principal point Lens distortion Extrinsic Parameters Translation Rotation Note: not all are actually required to be able to get a correction, but we need to have most for each of the participants (camera, projector)
")
11
Chosen Approach - Homography
Popular in image and video analysis Offers a simpler approach for planar-to-planar projection problems

12
Using Homography A point (x1,y1) is projected from one plane to another point (x2,y2) x1,y1 x2,y2 We represent these points in homogenous coordinates

13
Using Homography In homogenous coordinates we get the following pinhole model

14
Using Homography Solving an 8-DOF system
Applying properties of homogenous representation where z=0 in points on planars, we get: 1 Solving an 8-DOF system

15
Method and Setup

16
Steps Get at least 4 correspondence points (usually the four corners) to solve 8-DOF system. Solve the homography matrix from corresponding points in captured projected image (webcam) to reference straight image. Apply persepective warp: H*(reference image) “pre-warping” Re-project the pre-warped image
 to reference straight image. Apply persepective warp: H*(reference image) pre-warping Re-project the pre-warped image.")
17
Raised Issues The model is a good approximation
Some factors are added but are not considered in the model: Projector and webcam’s native distortions In practice, we need to improve the process, for more flexibility.

18
Improvement Project a chessboard pattern: 6x8 squares (5x7 inner corners) Detects 35 corresponding points Scale-down the reference image to approximate to the size of the captured image (factor of resize: diagonals on inner corners) Solves the Homography using RANSAC with the 35 sample points
 Solves the Homography using RANSAC with the 35 sample points.")
19
Setup and Results -Laptop Computer -Webcam -Pico Projector
-Program using OpenCV library (Linux OS)
")
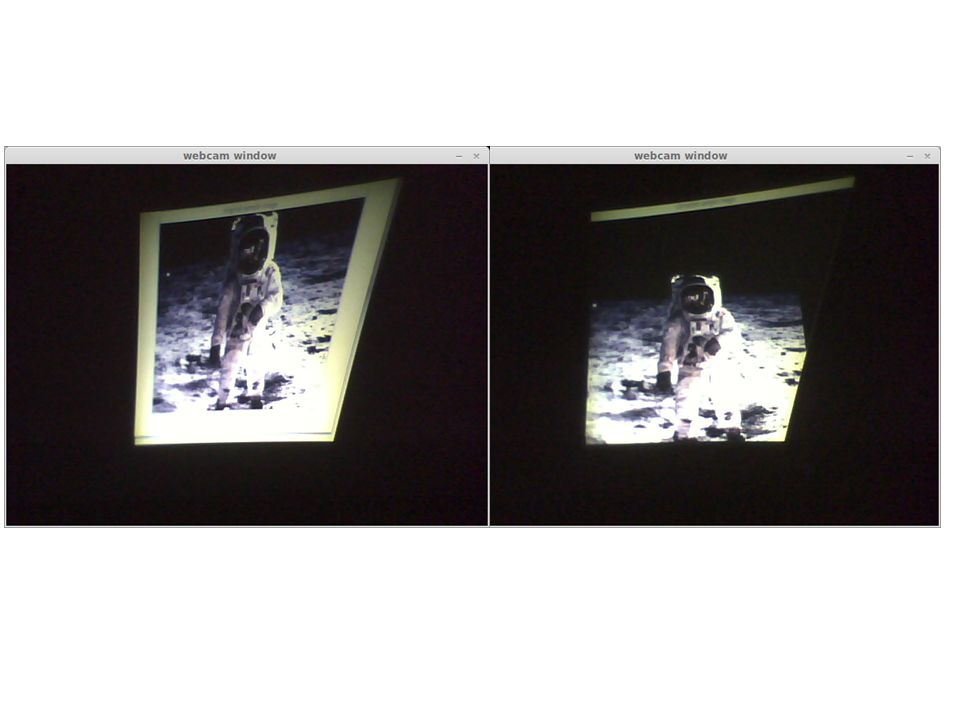
20
Results

Similar presentations






 with a lot of slides stolen from.>")














