Download presentation
Presentation is loading. Please wait.

1
Dinesh Kumar Challa

2
Overview Introduction Implementation System Architecture Interfaces Performance Analysis Conclusion Future Work Demo Questions Acknowledgements

3
Introduction This thesis work proposes a Vehicle Highway Automation System (VHAS) for automating traffic information gathering and decision making in a vehicle. Cost effective Near to real life implementation

4
Types of VHAS Technology that is entirely contained within the vehicle Autonomous VHAS Combinations of in-vehicle and infrastructure technologies outside the vehicle Co-Operative VHAS

5
Autonomous VHAS Advantages Cost effective Vehicle Automation Collision Avoidance Disadvantages No Highway Information System No Route Guidance No Vehicle Tracking No Traffic Surveillance No Collision Prevention

6
Co-Operative VHAS Advantages Increase in throughput More predictable and reduced trip times Increase in safety Vehicle automation Collision avoidance and Prevention Highway information system Route guidance Traffic surveillance and vehicle tracking Disadvantages Not easy to implement Implementation Costs more than Autonomous VHAS

7
Implementation Wireless Sensor networks (WSN) for road side infrastructure. Advantages of WSN Economical Can be implemented on existing Highways Not Difficult to Implement Reliable Consumes Less Space Have Several Sensors Wireless communication

8
Test Bed Implement VHAS in a smaller environment Simulates highway Simulates road side infrastructure

9
Components of Test Bed E-puck TelosB mote IpaQ USB Hub

10
E-puck Small differential wheeled mobile robot Simulates car on a highway Several Sensors 8 proximity sensors Camera 3 Floor sensors Light sensor Vibration sensor Accelerometer Communication Radio Communication Bluetooth Communication Infrared Communication

11
TelosB Mote Sensor node in WSN Used in road side infrastructure Several Sensors PIR sensor Light sensor Temperature sensor Humidity sensor More sensors can be added Communication Radio Communication

12
Real Scenario of VHAS Implementation

13
VHAS Architecture

14
Sensing Layer Present in both the e-puck and the TelosB mote Senses events of interest using the sensors. Collects sensory data.

15
Regulation Layer Only present in the e-puck. Regulates the properties of e-puck. Properties Speed Turn Angle Stop Start Reverse

16
Communication Layer Present in both e-puck and the TelosB mote. Provides Communication

17
Update Layer Present only in the TelosB mote. Updates the status of itself Updates the status of other nodes. Propagate the status of the node.

18
Query Layer Present in both the e-puck and TelosB mote. Queries the information from e-pucks and motes.

19
Control Layer Present in both the e-puck and the Telosb mote Controls the whole system Decision Making System Messages are routed through this system Responsible for making decisions Planning and Co-ordination System Plans the sequence of actions Co-ordinates the communication Safety Control System Ensures safety

20
VHAS Interfaces Sensing Layer Interfaces Get_Camera_Capture_Data(Char Cam_Data[2*40*40]) Get_Calibrated_Proximity_Sensor( int Prox_id ) Read_Floor_Sensor( int floor_id) Read_PIR_Sensor( ) Control Layer Interfaces Obstacle_Avoidance( ) Lane_Following( ) Detect_epuck ( ) Get_Shortest_Path (int src_address, int dest_address) Reserve_node ( int node_address) Reserve_NextNode (int dest_node_address) Reserve_Path (int dest_address) Reserve_Available_Path (int dest_address) goto_dest_NextNode (int dest_address) goto_dest_Path(int dest_address) goto_dest_AvailablePath(int dest_address) Update Layer Interfaces Send_Update(TOS_MSG Msg) Receive_Update(TOS_MSG Msg) Query Layer Interfaces Query_Next_Node ( int next_node_address) Query_Node (int dest_node_address) Query_Path_toNode (int dest_node_address) Regulation Layer Interfaces Move( float Speed, float Distance) Move_Time( float Speed, float Time) SetSpeed( float Speed) Left_Turn (float Speed, int Stop) Right_Turn ( float Speed, int Stop) Turn ( float Speed, float Angle, float Distance) Communication Layer Interfaces Send( int dest_id, int Size_Of_Message, MSG) Receive (TOS_MSG MSG) SendPacket (char destinationgroup, int destinationaddress, char* packet, int packetsize) IsPacketReady ( char* packet, int* packetSize)
![VHAS Interfaces Sensing Layer Interfaces Get_Camera_Capture_Data(Char Cam_Data[2*40*40]) Get_Calibrated_Proximity_Sensor( int Prox_id ) Read_Floor_Sensor( int floor_id) Read_PIR_Sensor( ) Control Layer Interfaces Obstacle_Avoidance( ) Lane_Following( ) Detect_epuck ( ) Get_Shortest_Path (int src_address, int dest_address) Reserve_node ( int node_address) Reserve_NextNode (int dest_node_address) Reserve_Path (int dest_address) Reserve_Available_Path (int dest_address) goto_dest_NextNode (int dest_address) goto_dest_Path(int dest_address) goto_dest_AvailablePath(int dest_address) Update Layer Interfaces Send_Update(TOS_MSG Msg) Receive_Update(TOS_MSG Msg) Query Layer Interfaces Query_Next_Node ( int next_node_address) Query_Node (int dest_node_address) Query_Path_toNode (int dest_node_address) Regulation Layer Interfaces Move( float Speed, float Distance) Move_Time( float Speed, float Time) SetSpeed( float Speed) Left_Turn (float Speed, int Stop) Right_Turn ( float Speed, int Stop) Turn ( float Speed, float Angle, float Distance) Communication Layer Interfaces Send( int dest_id, int Size_Of_Message, MSG) Receive (TOS_MSG MSG) SendPacket (char destinationgroup, int destinationaddress, char* packet, int packetsize) IsPacketReady ( char* packet, int* packetSize)](http://images.slideplayer.com/13/3900683/slides/slide_20.jpg "VHAS Interfaces Sensing Layer Interfaces Get_Camera_Capture_Data(Char Cam_Data[2*40*40]) Get_Calibrated_Proximity_Sensor( int Prox_id ) Read_Floor_Sensor( int floor_id) Read_PIR_Sensor( ) Control Layer Interfaces Obstacle_Avoidance( ) Lane_Following( ) Detect_epuck ( ) Get_Shortest_Path (int src_address, int dest_address) Reserve_node ( int node_address) Reserve_NextNode (int dest_node_address) Reserve_Path (int dest_address) Reserve_Available_Path (int dest_address) goto_dest_NextNode (int dest_address) goto_dest_Path(int dest_address) goto_dest_AvailablePath(int dest_address) Update Layer Interfaces Send_Update(TOS_MSG Msg) Receive_Update(TOS_MSG Msg) Query Layer Interfaces Query_Next_Node ( int next_node_address) Query_Node (int dest_node_address) Query_Path_toNode (int dest_node_address) Regulation Layer Interfaces Move( float Speed, float Distance) Move_Time( float Speed, float Time) SetSpeed( float Speed) Left_Turn (float Speed, int Stop) Right_Turn ( float Speed, int Stop) Turn ( float Speed, float Angle, float Distance) Communication Layer Interfaces Send( int dest_id, int Size_Of_Message, MSG) Receive (TOS_MSG MSG) SendPacket (char destinationgroup, int destinationaddress, char* packet, int packetsize) IsPacketReady ( char* packet, int* packetSize)")
21
Sensing Layer Interfaces E-puck Get_Camera_Capture_Data(Char Cam_Data[2*40*40]) Get_Calibrated_Proximity_Sensor( int Prox_id ) Read_Floor_Sensor( int floor_id) TelosB Mote Read_PIR_Sensor( )
![Sensing Layer Interfaces E-puck Get_Camera_Capture_Data(Char Cam_Data[2*40*40]) Get_Calibrated_Proximity_Sensor( int Prox_id ) Read_Floor_Sensor( int floor_id) TelosB Mote Read_PIR_Sensor( )](http://images.slideplayer.com/13/3900683/slides/slide_21.jpg "Sensing Layer Interfaces E-puck Get_Camera_Capture_Data(Char Cam_Data[2*40*40]) Get_Calibrated_Proximity_Sensor( int Prox_id ) Read_Floor_Sensor( int floor_id) TelosB Mote Read_PIR_Sensor( )")
22
Regulation Layer Interfaces E-puck Move( float Speed, float Distance) Move_Time( float Speed, float Time) SetSpeed( float Speed) Left_Turn (float Speed, int Stop) Right_Turn ( float Speed, int Stop) Turn ( float Speed, float Angle, float Distance)
 Move_Time( float Speed, float Time) SetSpeed( float Speed) Left_Turn (float Speed, int Stop) Right_Turn ( float Speed, int Stop) Turn ( float Speed, float Angle, float Distance)")
23
Communication layer Interfaces E-puck SendPacket (char destinationgroup, int destinationaddress, char* packet, int packetsize) IsPacketReady ( char* packet, int* packetSize) TelosB Mote Send( int dest_id, int Size_Of_Message, MSG) Receive (TOS_MSG MSG)
 IsPacketReady ( char* packet, int* packetSize) TelosB Mote Send( int dest_id, int Size_Of_Message, MSG) Receive (TOS_MSG MSG)")
24
Update Layer Interfaces TelosB Mote Send_Update(TOS_MSG Msg) Receive_Update(TOS_MSG Msg)
 Receive_Update(TOS_MSG Msg)")
25
Query Layer Interfaces TelosB Mote Query_Next_Node ( int next_node_address) Query_Node (int dest_node_address) Query_Path_toNode (int dest_node_address)
 Query_Node (int dest_node_address) Query_Path_toNode (int dest_node_address)")
26
Control Layer Interfaces E-puck Obstacle_Avoidance( ) Lane_Following( ) goto_dest_NextNode (int dest_address) goto_dest_Path(int dest_address) goto_dest_AvailablePath(int dest_address) TelosB Mote Detect_epuck ( ) Get_Shortest_Path (int src_address, int dest_address) Reserve_node ( int node_address) Reserve_NextNode (int dest_node_address) Reserve_Path (int dest_address) Reserve_Available_Path (int dest_address)
 Lane_Following( ) goto_dest_NextNode (int dest_address) goto_dest_Path(int dest_address) goto_dest_AvailablePath(int dest_address) TelosB Mote Detect_epuck ( ) Get_Shortest_Path (int src_address, int dest_address) Reserve_node ( int node_address) Reserve_NextNode (int dest_node_address) Reserve_Path (int dest_address) Reserve_Available_Path (int dest_address)")
27
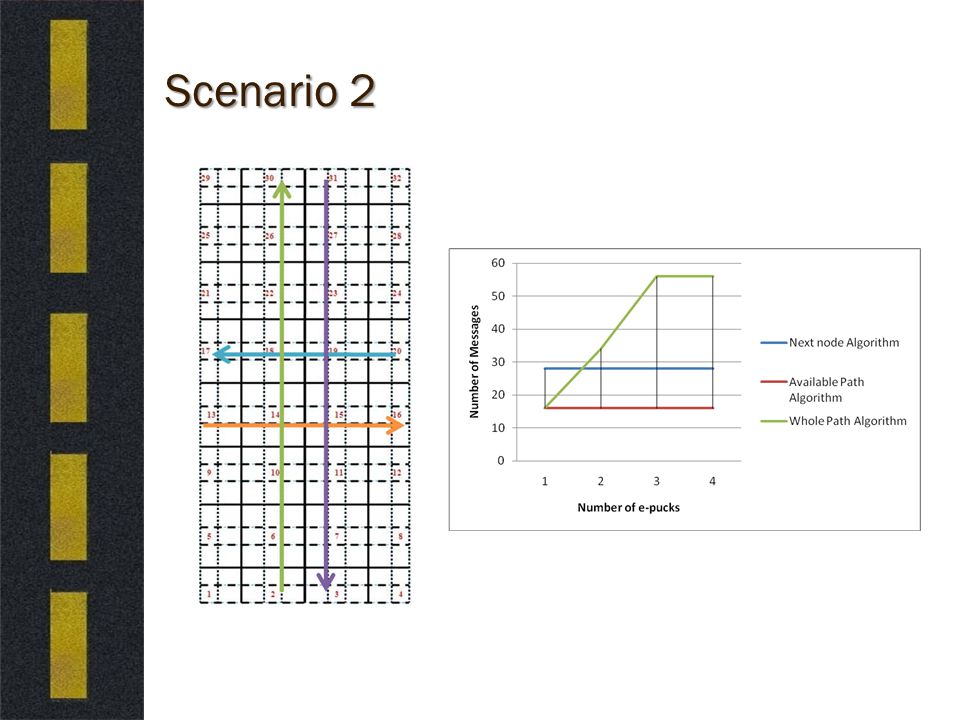
Algorithms Obstacle Avoidance Algorithm Avoids Obstacle Line Following Algorithm Follows Black Line Next Node Algorithm Automates the e-puck reach the desired destination by reserving one node at a time Whole Path Algorithm Automates the e-puck reach the desired destination by reserving whole path at a time Available Path Algorithm Automates the e-puck reach the desired destination by reserving all the available nodes in a path at a time

28
Algorithm Explanation

29
Performance Analysis To check the efficiency of the system. To check the accuracy of the system. To check the safety of the system. To compare the performances of three algorithms. Next Node Algorithm Whole Path Algorithm Available Path Algorithm Performance is analyzed for different scenarios Performance is analyzed with different number of boards

30
Analysis With Four Boards Scenario 1 E-pucks moving to one common destination with different starting points Scenario 2 E-pucks moving perpendicular to each other with different destination and starting points

31
Scenario 1

33
Scenario 2

35
Test With Two Boards Scenario 1 E-pucks moving to one common destination with different starting points Scenario 2 E-pucks moving perpendicular to each other with different destination and starting points

36
Scenario 1

38
Scenario 2

40
Conclusion This thesis work introduced Vehicle Highway Automation System for automating traffic information gathering and decision making in a vehicle on a highway. Test bed is created to implement and test VHAS in a smaller environment Characteristics of VHAS are successfully implemented. Performance of VHAS implementation is analyzed. Achieved full automation of vehicle effectively System ensured safety Available path algorithm was proven better

41
Future Work Traffic Surveillance Priority reservation of path Extending to multi lane highway

43
Acknowledgements Dr. Gurdip Singh Dr. Masaaki Mizuno Dr. Daniel Andresen

Similar presentations






 Yu-Chee Tseng (appeared in ICS 2006)>")




 is a wireless network using sensors to cooperatively.>")













