Download presentation
Presentation is loading. Please wait.

1
FIRST (FP7/Marie-Curie) Fronts and Interfaces in Science & Technlogy Adaptive and directional local processing in image processing Arpan Ghosh Supervisor: R.Duits
 Fronts and Interfaces in Science & Technlogy Adaptive and directional local processing in image processing Arpan Ghosh Supervisor: R.Duits")
2
Directional processing image processing muscle cells bone-structure retinal bloodvessels catheters neural fibers in brain collagen fibres Crack-Detection hart Challenge: Deal with crossings and fiber-context

3
Particular Focus on Diffusion weighted MRI

4
Invertible Orientation Scores imagekernelorientation score invertible

5
Brownian motion of water molecules along fibers fibertracking DTIHARDI Extend to New Medical Image Modalities

6
Adaptive Left Invariant HJB-Equations on HARDI/DTI InputViscosity solution

7
Diffusion & Erosion on DTI

8
Challenges The viscosity solutions of HJK are solved by morphological convolution. Analytic/exact solutions ? Use HJB-eqs for fiber tracking via Charpit’s equations Canonical equations on contact manifold ? The left-invariant PDE’s take place along autoparallels w.r.t. Cartan connection. So Non-linear PDE’s by best exp-curve fit to data ? Exact solutions of geodesics

9
Problem considered currently Let curve Curvature function Corresponding energy functional The challenge is to find for given end points and directions s.t.

10
The Setup 5D manifold of positions & directions ℝ ³×S² not a group! Consider embedding of ℝ ³×S² into the Lie group SE(3) ≔ ℝ ³ ⋊ SO(3) By the quotient: ℝ ³ ⋊ S² ≔ SE(3)/({0} ⋊ SO(2)) Consider Euler angle parameterization of S² for chart.
 ≔ ℝ ³ ⋊ SO(3) By the quotient: ℝ ³ ⋊ S² ≔ SE(3)/({0} ⋊ SO(2)) Consider Euler angle parameterization of S² for chart..")
11
Differential Geometry Tools SE(3) : Lie Group with group product Unity element Lie algebra
 : Lie Group with group product Unity element Lie algebra")
12
Left Invariant VF’s A moving frame of reference using left invariant vector fields The space of left invariant vector fields on SE(3) Duals :
 Duals :")
13
Cartan’s Geometry

14
Commutator Table Lie brackets for the Lie algebra given by

15
Horizontal Curves in SE(3) Curve is horizontal iff Using the Frenet-Serret formulas, curvature and torsion of the spatial part of the curve are given by
 Curve is horizontal iff Using the Frenet-Serret formulas, curvature and torsion of the spatial part of the curve are given by")
16
Problem in the Moving Frame The energy functional to minimize over all curves in SE(3): subject to the constraints along the curve :
: subject to the constraints along the curve :")
17
15D Manifold Consider the sub-Riemannian manifold The constraints are 1 forms

18
Lagrangian 1-form on T*(Z): Consider perturbations of stationary horizontal curves Then, using Stoke’s theorem For stationary curves, the above is 0 for all t. So,

19
By inserting 15 independent vectors from the sub-Riemannian manifold T(Z) and using Cartan’s structural formulas, we get Pfaffian System
 and using Cartan’s structural formulas, we get Pfaffian System")
21
Solution for Curvature The Pfaffian system produces the following

22
The Geodesics Can get curve by solving Frenet frame equations The last 6 equations from the system gives the equation for the geodesic where μ is a constant 6D row vector and m(g) is the 6×6 matrix representation of g ∈ SE(3).
 is the 6×6 matrix representation of g ∈ SE(3).")
23
Transformed Curve Choose s.t.

24
Solution of Transformed Curve where

25
We get back the original curve by the following relation

26
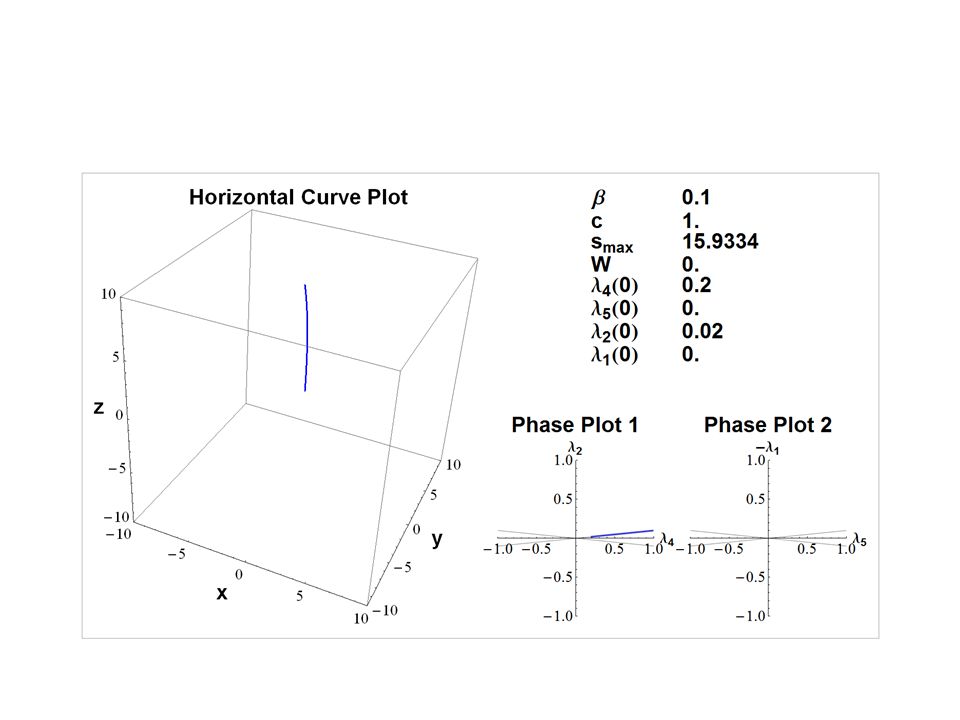
Results

29
Boundary value problem The boundary problem is solved by solving for 5 unknowns namely the following system 6 dependent polynomial equations in the 5 variables above, of degree upto 8!

30
Current Focus Solution of the boundary problem Surjectivity of the geodesics Study of the second variation of energy functional to prove optimality

31
Next target Geometric fiber tracking based on the same Hamiltonian and Lagrangian framework with a cost coming from the enhanced data sets.

32
Thank you!

Similar presentations



.>")











 2. Diffusion-step curvature.>")





