Download presentation
Presentation is loading. Please wait.

1
Topic 6 - Image Filtering - I DIGITAL IMAGE PROCESSING Course 3624 Department of Physics and Astronomy Professor Bob Warwick

2
6. Image Filtering I: Spatial Domain Filtering The goal of spatial filtering is typically either to (a) reduce the impact of noise in the image via image smoothing or (b) to sharpen the detail within the image. Both processes involve the suppression and/or enhancement of particular spatial frequency components in the image (see Topic 8). Point process (eg. Mapping) Neighbourhood process (eg. Spatial filtering) For a mask of dimension n x n (n odd), where m = (n-1)/2 is the central element. Calculate for all x & y Note that the denominator is a normalisation factor – sometimes not applicable! (ii) Compute a new image g xy from the old image f xy via: Procedure (i)Define an array of values known variously as the mask, filter, operator etc.. (usually with a 3 x 3 or 5 x 5 or 7 x 7 etc.. format)
 reduce the impact of noise in the image via image smoothing or (b) to sharpen the detail within the image. Both processes involve the suppression and/or enhancement of particular spatial frequency components in the image (see Topic 8). Point process (eg. Mapping) Neighbourhood process (eg. Spatial filtering) For a mask of dimension n x n (n odd), where m = (n-1)/2 is the central element. Calculate for all x & y Note that the denominator is a normalisation factor – sometimes not applicable. (ii) Compute a new image g xy from the old image f xy via: Procedure (i)Define an array of values known variously as the mask, filter, operator etc.. (usually with a 3 x 3 or 5 x 5 or 7 x 7 etc.. format).")
3
3 Computing the 2-d Result original 3x3 average

4
6.1 Smoothing Filters Smoothing filters involve calculating the average value (with some defined weighting) within the masked region. Assuming a 3 x 3 format, some possibilities are: 1 1 1 Replaces the original value with 1 1 1 the average of 9 values (the central 11 1 pixel plus its 8 nearest neighbours) 1 1 1 Double weighting of the central pixel 1 2 1 11 1 0 1 0 Replaces the original value with 11 1 the average of 5 values (the central 0 1 0 pixel plus its 4 nearest neighbours)
 Double weighting of the central pixel Replaces the original value with 11 1 the average of 5 values (the central pixel plus its 4 nearest neighbours).")
5
Author: Richard Alan Peters II Smoothing Examples: Original Images

6
Smoothing Examples: 3 3 Blur

7
Smoothing Examples: 5 5 Blur

8
Smoothing Examples: 9 9 Blur

9
Smoothing Examples: 17 17 Blur

10
Image Smoothing Examples Original Smoothed

11
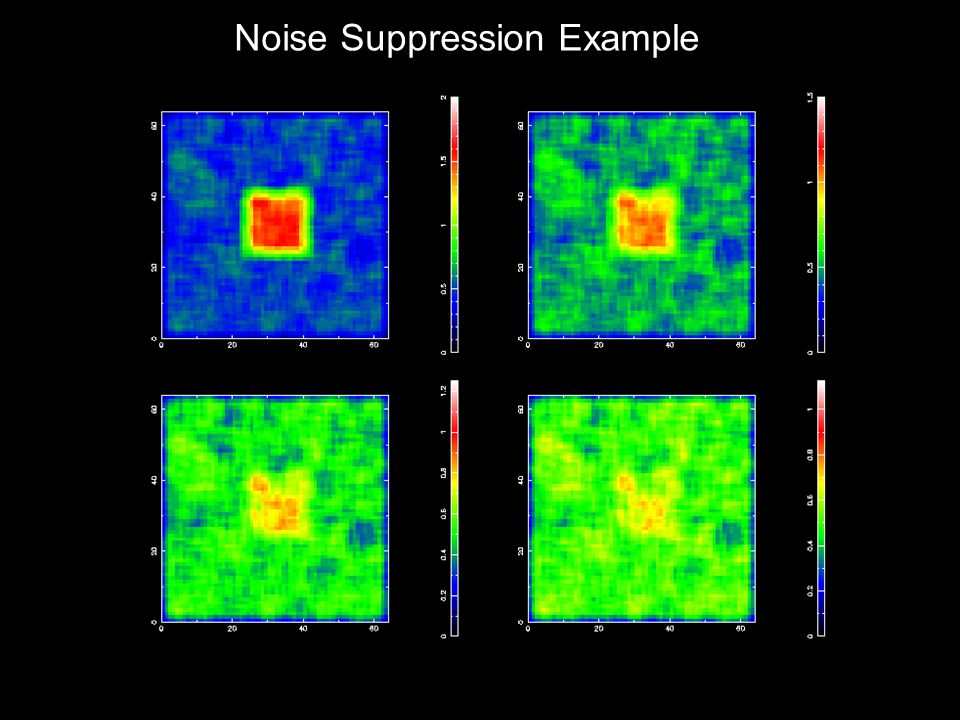
Noise Suppression Example

13
Calculating the effective noise reduction Example Applying a 3 x 3 smoothing filter with unit coefficients results in a factor 3 reduction in the noise. mean and standard deviation Gaussian Distribution f P(f)
.")
14
The Median Filter Smoothing filters can be used to reduce the impact of the noise in an image but also cause unwanted blurring. The larger the dimension of the smoothing mask the greater the noise reduction factor but also the greater the blurring. Non-linear filters, such as the Median Filter, can to some degree “decouple” these two effects – but in a way which is hard to quantify. 133 140 147 152 154 163 164 171 The median filter would replace the central value with the median value contained within the mask (or window) region.
 region..")
15
Suppression of Impulsive Noise Smoothing Filter Median Filter

16
Suppression of Impulsive Noise

17
6.2 Sharpening Filters Smoothing Averaging Sharpening Differencing In practice with discrete variables differencing is equivalent to differentiation and both the 1 st and 2 nd differentials can be used to mark the position in an image where there are rapid changes in gray level (ie edges). Continuous variables The objective is to enhance the detail in the image by accentuating edges and boundaries.

18
Types of Filters Used in Image Sharpening - I Pairs of masks of various formats which give the vertical (a xy ) and horizontal (b xy ) gradients: (i) The Roberts Operators (ii) (iii) The Prewitt Operators Where the final gradient image is calculated as:
 and horizontal (b xy ) gradients: (i) The Roberts Operators (ii) (iii) The Prewitt Operators Where the final gradient image is calculated as:")
19
Image Sharpening Examples Consider an image consisting of: Applying the following filters gives: (i) (ii) … 0 0 0 0 1 1 1 ….. … 0 0 0 0 0 0 0 ….. … 0 0 0 3 3 0 0 …..

20
Calculating the Gradient Image Lena

21
The Sobel Operators Calculating the Gradient Image

22
Types of Filters Used in Image Sharpening - II (i) (ii) (iii) Masks which give the 2 nd differential or Laplacian image
 (ii) (iii) Masks which give the 2 nd differential or Laplacian image")
23
0 255 -255 510 2 2 4 The 1-d and 2-d Laplacian Mask in Action

24
The Image Sharpening Process In image sharpening the usual approach is to add the derived ‘gradient’ or ‘Laplacian’ image to the original image in a process known as high frequency emphasis. Thus: Final image = original image + gradient or Laplacian image For the Laplacian case this can be achieved in one step by modifying the 2-d mask to: or

25
Image Sharpening Examples Consider an image consisting of: Applying the following filters gives: (i) (ii) … 0 0 0 0 1 1 1 ….. … 0 0 0 -3 3 0 0 ….. … 0 0 0 -3 4 1 1 …..

26
Image Sharpening Examples

27
The Mathematical Process of Spatial Filtering Consider the 1-d case of spatial filtering with an n element mask (n odd), where m= (n-1)/2 and ignoring the normalization factor. x i i' i'' a Equation 4 is the discrete version of the CONVOLUTION INTEGRAL. SPATIAL FILTERING IS A CONVOLUTION PROCESS

28
The Mathematical Process of “Convolution”

29
Practical Considerations (i)Edge Errors For an n x n mask there is a (n-1)/2 border to the new image where exact values cannot be calculated. Solutions are: (a) Reduce the dimensions of the new image (usually impractical) (b) Calculate approximate values for the border pixels (c) Compute the cyclic convolution (beyond our scope). (ii)Separability A 2-d mask is separable if the successive application of two 1-d masks gives the equivalent result to the application of the 2-d mask. For example, considered as matrices: Therefore this smoothing mask is separable. There are computational advantages if the mask is separable. Note: Both gradient and Laplacian filters can also be used in EDGE DETECTION – see topic 10
 Reduce the dimensions of the new image (usually impractical) (b) Calculate approximate values for the border pixels (c) Compute the cyclic convolution (beyond our scope). (ii)Separability A 2-d mask is separable if the successive application of two 1-d masks gives the equivalent result to the application of the 2-d mask. For example, considered as matrices: Therefore this smoothing mask is separable. There are computational advantages if the mask is separable. Note: Both gradient and Laplacian filters can also be used in EDGE DETECTION – see topic 10.")
Similar presentations


>")








>")






 Images by Pawan SinhaPawan Sinha formal terminology.>")
