Download presentation
Presentation is loading. Please wait.

1
Object Recognition with Features Inspired by Visual Cortex T. Serre, L. Wolf, T. Poggio Presented by Andrew C. Gallagher Jan. 25, 2007

2
Overview Motivation Biological Model The Features Results Conclusions

3
Motivation We know the human visual system works. So, let’s try to build a recognition system that is modeled after the HVS.

4
Recognition Background Template-Based Methods- lack robustness to object transformation. Histogram-Based Descriptors (e.g. SIFT) have so much flexibility that discrimination can be degraded. This paper introduces new features (inspired by the human visual system) that exhibit a better trade-off between invariance and selectivity.
 have so much flexibility that discrimination can be degraded. This paper introduces new features (inspired by the human visual system) that exhibit a better trade-off between invariance and selectivity..")
5
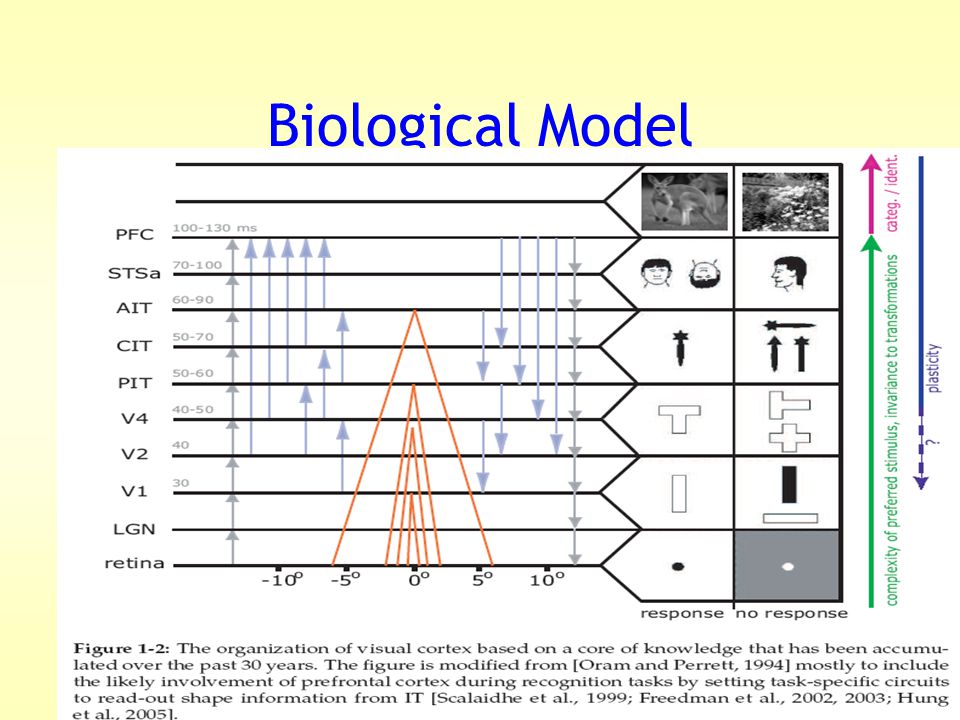
Biological Model

8
The Feature Algorithm The Primary Visual Cortex (V1) contains simple (S1) and complex (C1) cells. S1: Apply a battery of Gabor Filters. C1: Take a maximum over scales.

9
S1 Simple Cells S1: Apply a battery of Gabor Filters, varying in size and orientation.

10
C1 Complex Cells C1: Take a maximum over scales (within each band) over each of the four orientations, providing robustness to scale and translation.
 over each of the four orientations, providing robustness to scale and translation.")
11
S2 and C2 A set of patches (n x n x 4 orientations) is randomly created. N = {4,8,12, or 16}. In S2, the stored patches are correlated with the C1 layers. This image has 1 plane per band, but no longer has different orientations (as it describes similarity across the orientations.) Basically, S2 is a Euclidean distance from an image patch C1 to a learned, labeled patch P. (About ~1000 randomly selected, unsupervised, patches are used). In C2, the max over positions and scales from the S2 map is found.
 Basically, S2 is a Euclidean distance from an image patch C1 to a learned, labeled patch P. (About ~1000 randomly selected, unsupervised, patches are used). In C2, the max over positions and scales from the S2 map is found..")
12
The Features

14
Another Feature Summary

15
Experimental Results Tested with images that either contain or do not contain a single instance of the target. The system must decide if the object is present. Datasets: MIT-CBCL, Caltech.

16
Experimental Results Results on 50 positive and 50 negative examples.

17
More Experimental Results

18
Learned Features

19
Conclusions Biologically motivated features are extracted and then used for classification. Based on a feedforward model of object recognition in the cortex. Performance is excellent.

Similar presentations






 Reporter :鄒嘉恆 Date : 10/06/2009.>")














