Download presentation
Presentation is loading. Please wait.

1
Visualizing the Microscopic Structure of Bilinear Data: Two components chemical systems

2
A matrix can be decomposed into the product of two significantly smaller matrices. Factorization: In many chemical studies, the measured or calculated properties of the system can be considered to be the linear sum of the term representing the fundamental effects in that system times appropriate weighing factors. D = X Y + R DX Y = + R

3
A simple one component system

4
Observing the rows of data in wavelength space

5
Observing the columns of data in time space

6
D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition =D U SV d 1,: d 2,: d p,: … = u 11 u 21 u p1 … s 11 v1v1 d 1,: = u 11 s 11 v 1 d 2,: = u 21 s 11 v 1 …… d p,: = u p1 s 11 v 1 For r=1 Row vectors: D = u 1 s 11 v 1

7
D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition [ d :,1 d :,2 … d :,q ] = u 1 s 11 [v 11 v 12 … v 1q ] d :,1 = u 1 s 11 v 11 …… d :,2 = u 1 s 11 v 12 d :,q = u 1 s 11 v 1q Column vectors: =D U SV For r=1 D = u 1 s 11 v 1
![D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition [ d :,1 d :,2 … d :,q ] = u 1 s 11 [v 11 v 12 … v 1q ] d :,1 = u 1 s 11 v 11 …… d :,2 = u 1 s 11 v 12 d :,q = u 1 s 11 v 1q Column vectors: =D U SV For r=1 D = u 1 s 11 v 1](http://images.slideplayer.com/12/3343717/slides/slide_7.jpg "D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition [ d :,1 d :,2 … d :,q ] = u 1 s 11 [v 11 v 12 … v 1q ] d :,1 = u 1 s 11 v 11 …… d :,2 = u 1 s 11 v 12 d :,q = u 1 s 11 v 1q Column vectors: =D U SV For r=1 D = u 1 s 11 v 1")
8
Rows of measured data matrix in row space: v1v1 u 11 s 11 v 1 u p1 s 11 v 1 u 11 s 11 u 21 s 11 … u p1 s 11 p points (rows of data matrix) in rows space have the following coordinates:
 in rows space have the following coordinates:")
9
Columns of measured data matrix in column space: v 11 s 11 v 12 s 11 … v 1q s 11 q points (columns of data matrix) in columnss space have the following coordinates: u1u1 v 11 s 11 u 1 v 1q s 11 u 1
 in columnss space have the following coordinates: u1u1 v 11 s 11 u 1 v 1q s 11 u 1")
10
Visualizing the rows and columns of data matrix

11
Solutions Pure spectrum v 1j s 11 Pure conc. profile u i1 s 11

12
Two component systems

13
Visualizing data in three selected wavelengths

14
Visualizing data in three selected Times

15
Measured Data Matrix

16
D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition Row vectors: d 1,: d 2,: d p,: … = u 11 u 21 u p1 … s 11 v1v1 u 12 u 22 u p2 … s 22 v2v2 + d 1,: = u 11 s 11 v 1 + u 12 s 22 v 2 d 2,: = …… d p,: = u 21 s 11 v 1 + u 22 s 22 v 2 u p1 s 11 v 1 + u p2 s 22 v 2 … For r=2 D = u 1 s 11 v 1 + u 2 s 22 v 2

17
D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition [ d :,1 d :,2 … d :,q ] = u 1 s 11 [v 11 v 12 … v 1q ] + u 2 s 22 [v 21 v 22 … v 2q ] d :,1 = s 11 v 11 u 1 + s 22 v 21 u 2 …… d :,2 = d :,q = s 11 v 12 u 1 + s 22 v 22 u 2 s 11 v 1q u 1 + s 22 v 2q u 2 For r=2 D = u 1 s 11 v 1 + u 2 s 22 v 2 Column vectors:
![D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition [ d :,1 d :,2 … d :,q ] = u 1 s 11 [v 11 v 12 … v 1q ] + u 2 s 22 [v 21 v 22 … v 2q ] d :,1 = s 11 v 11 u 1 + s 22 v 21 u 2 …… d :,2 = d :,q = s 11 v 12 u 1 + s 22 v 22 u 2 s 11 v 1q u 1 + s 22 v 2q u 2 For r=2 D = u 1 s 11 v 1 + u 2 s 22 v 2 Column vectors:](http://images.slideplayer.com/12/3343717/slides/slide_17.jpg "D = USV = u 1 s 11 v 1 + … + u r s rr v r Singular Value Decomposition [ d :,1 d :,2 … d :,q ] = u 1 s 11 [v 11 v 12 … v 1q ] + u 2 s 22 [v 21 v 22 … v 2q ] d :,1 = s 11 v 11 u 1 + s 22 v 21 u 2 …… d :,2 = d :,q = s 11 v 12 u 1 + s 22 v 22 u 2 s 11 v 1q u 1 + s 22 v 2q u 2 For r=2 D = u 1 s 11 v 1 + u 2 s 22 v 2 Column vectors:")
18
Rows of measured data matrix in row space: u 11 s 11 d 1,: v1v1 v2v2 u 12 s 22 d 2,: d p,: u 21 s 11 u 22 s 22 u p2 s 22 u p1 s 11 … u 11 s 11 u 12 s 22 … u 21 s 11 u 22 s 22 u p1 s 11 u p2 s 22 … Coordinates of rows

19
Columns of measured data matrix in column space: u1u1 u2u2 d :, 2 d :, 1 d :, q … v 2q s 22 v 1q s 11 v 12 s 11 v 22 s 22 v 21 s 22 v 11 s 11 v 11 s 11 v 12 s 11... v 1q s 11 Coordinates of columns v 21 s 11 v 22 s 11... v 2q s 11

20
Two component chromatographic system

21
Two component Kinetic system

22
Two component multivariate calibration

23
Position of a known profile in corresponding space: dxdx T v1 T v2 v1v1 v2v2 T v1 is the length of projection of d x on v 1 vector T v1 = d x. v 1 T v2 is the length of projection of d x on v 1 vector T v2 = d x. v 2 T v1 T v2 Coordinates of d x point:

24
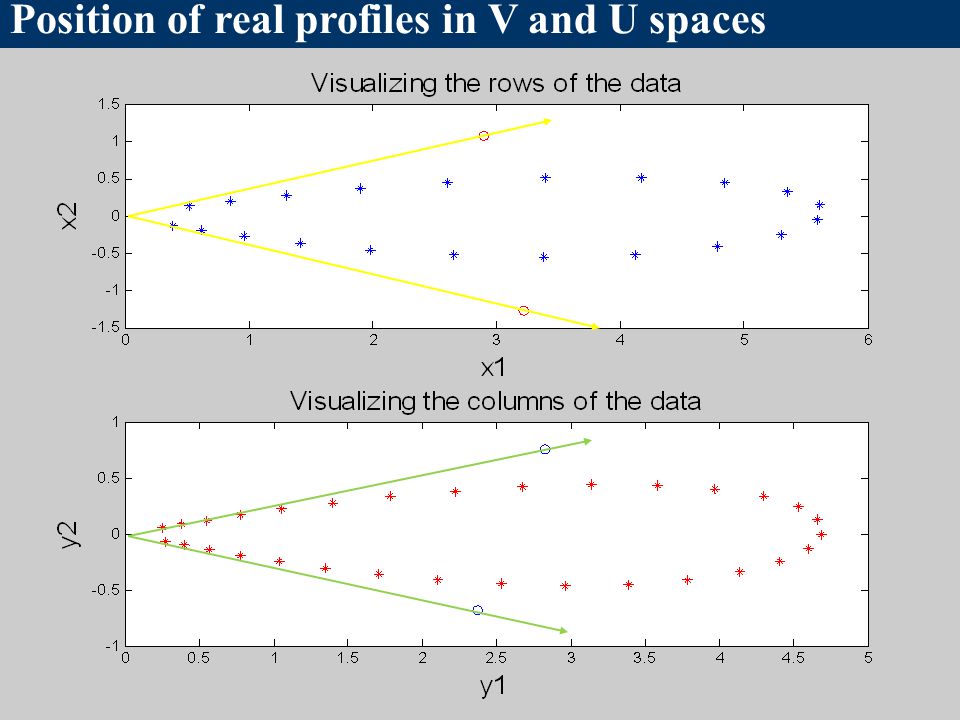
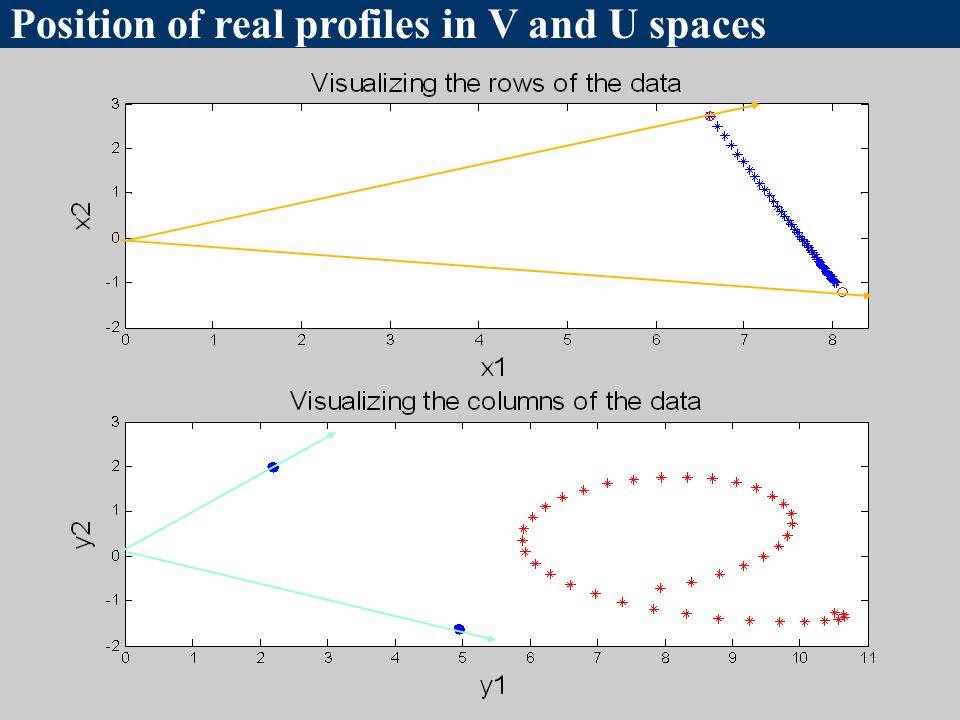
Position of real profiles in V and U spaces

27
Duality in Measured Data Matrix

28
p n xiTxiT xjxj x ij PpPp SnSn vnvn v1v1 vivi PnPn SpSp upup u1u1 ujuj xixi xjxj Geometrical interpretation of an n x p matrix X

29
R= C S T = U D V T = X V T R T = S C T = VD U T = Y U T X = U D = RV = U Y T V Y= V D = R T U = V X T U X YTYT U V Duality based relation between column and row spaces =

30
Non-negativity constraint and the system of inequalities: U z ≥ 0 V z ≥ 0 X = U DU= X D -1 Y = V DV= Y D -1 U z = X D -1 z ≥ 0 Hyperplanes V z = Y D -1 z ≥ 0 Hyperplanes U-space Y Points V-space X Points

31
Duality based relation between column and row spaces x i = [x i,1 x i,2 ] U i,1 z i,1 + U i,2 z i,2 … U i,N z i,N ≥ 0 The coordinates of each point in one space defines the coefficient of related hyper plane in dual space Point x in V-spaceHyper plane (D -1 x) z in U-space For two-component systems: The ith point in V-space: x i x i D -1 = [U i,1 U i,2 … U i,N ] The ith hyperplane in U-space: A point in V-space: U i,1 z 1 + U i,2 z 2 ≥ 0 A half-plane in V-space:
![Duality based relation between column and row spaces x i = [x i,1 x i,2 ] U i,1 z i,1 + U i,2 z i,2 … U i,N z i,N ≥ 0 The coordinates of each point in one space defines the coefficient of related hyper plane in dual space Point x in V-spaceHyper plane (D -1 x) z in U-space For two-component systems: The ith point in V-space: x i x i D -1 = [U i,1 U i,2 … U i,N ] The ith hyperplane in U-space: A point in V-space: U i,1 z 1 + U i,2 z 2 ≥ 0 A half-plane in V-space:](http://images.slideplayer.com/12/3343717/slides/slide_31.jpg "Duality based relation between column and row spaces x i = [x i,1 x i,2 ] U i,1 z i,1 + U i,2 z i,2 … U i,N z i,N ≥ 0 The coordinates of each point in one space defines the coefficient of related hyper plane in dual space Point x in V-spaceHyper plane (D -1 x) z in U-space For two-component systems: The ith point in V-space: x i x i D -1 = [U i,1 U i,2 … U i,N ] The ith hyperplane in U-space: A point in V-space: U i,1 z 1 + U i,2 z 2 ≥ 0 A half-plane in V-space:")
32
Half-plane calculation in two-component systems: General half-plane General border line can be defined for all points that the ith element of the profile is equal to zero z1z1 z2z2 0 ith half-plane ith border line General border line U i,1 z 1 + U i,2 z 2 ≥ 0 z 2 ≥ (-U i,2 /U i,1 )z 1 z 2 = (-U i,2 /U i,1 )z 1
z 1 z 2 = (-U i,2 /U i,1 )z 1")
33
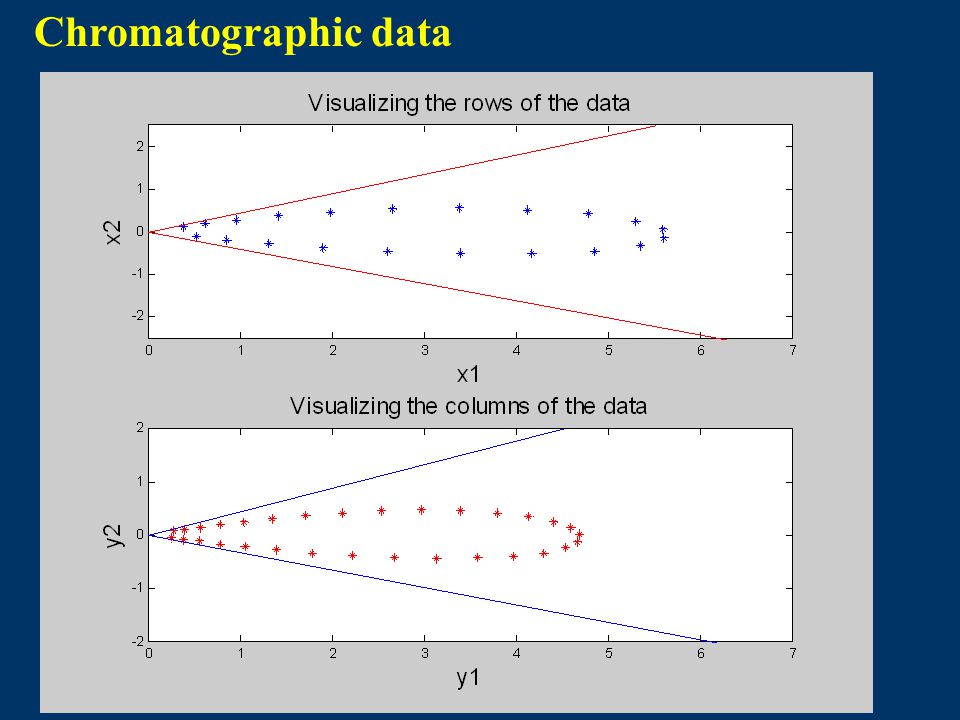
Chromatographic data

35
Kinetics data

37
Calibration data

39
Intensity ambiguity in V space v1v1 v2v2 a k1ak1a k2ak2a T 11 T 12 k 1 T 11 k 1 T 12 k 2 T 11 k 2 T 12

40
Normalization to unit length v1v1 v2v2 a k1ak1a k2ak2a T 11 T 12 k 1 T 11 k 1 T 12 k 2 T 11 k 2 T 12 anan a n = (1/||a||) a
 a")
41
Normalization to first eigenvector v1v1 v2v2 a k1ak1a k2ak2a T 11 T 12 k 1 T 11 k 1 T 12 k 2 T 11 k 2 T 12 1 a n = (1/(v.a))a anan
)a anan")
42
v1v1 v2v2 1 2 4 3 5 1’2’3’ 4’ 5’ Normalization to unit length

43
v1v1 v2v2 1 1 2 4 3 5 a = T 1 v 1 + T 2 v 2 a’ = v 1 + T v 2 1’2’3’ 4’ 5’ Normalization to first eigenvector

44
Chromatographic data- Normalized to unit length

45
Chromatographic data- Normalized to 1th eigenvector

46
Kinetics data- Normalized to unit length

47
Kinetics data- Normalized to 1th eigenvector

48
Multivariate calibration data- Normalized to unit length

49
Multivariate calibration data- Normalized to 1th eigenvector

50
The normalized abstract space of two component systems is one dimensional Data points region One dimensional normalized space There are 4 critical points in normalized abstract space of two-component systems: 1212 First inner point Second inner point First outer point Second outer point The 4 critical points can be calculated very easily and so the complete resolving of two component systems is very simple First feasible region Second feasible region Lawton-Sylvester Plot

51
Microscopic Observation of Two Component systems using Lawton- Sylvester Plot

52
First feasible solutions Second feasible solutions General Microscopic Structures of Two-Component Systems Second feasible solutions Case I) Case II) Case III)
 Case II) Case III)")
53
Lawton-Sylvester Plot- Multivariate calibration

54
Feasible Bands- Multivariate calibration

55
Feasible Bands- Chromatographic Data

56
Feasible Bands- Kinetics Data

57
Kinetics Data (I)
")
58
LS plot as a microscope for kinetics data (I)
")
59
Feasible bands for kinetics data (I)
")
60
Kinetics Data (II)
")
61
LS plot as a microscope for kinetics data (II)
")
62
Feasible bands for kinetics data (II)
")
Similar presentations








![A B C k1k1 k2k2 Consecutive Reaction d[A] dt = -k 1 [A] d[B] dt = k 1 [A] - k 2 [B] d[C] dt = k 2 [B] [A] = [A] 0 exp (-k 1 t) [B] = [A] 0 (k 1 /(k 2 -k.](/16/4919109/big_thumb.jpg "A B C k1k1 k2k2 Consecutive Reaction d[A] dt = -k 1 [A] d[B] dt = k 1 [A] - k 2 [B] d[C] dt = k 2 [B] [A] = [A] 0 exp (-k 1 t) [B] = [A] 0 (k 1 /(k 2 -k.>")


 =min (rank (X), rank (Y)) A = C S.>")









