Download presentation
Presentation is loading. Please wait.

1
Epipolar Geometry and the Fundamental Matrix F
The Epipolar Geometry is the intrinsic projective geometry between 2 views and the Fundamental Matrix encapsulates this geometry x F x’ = 0

2
Epipolar geometry The Epipolar geometry depends only on the internal parameters of the cameras and the relative pose. A point X in 3 space is imaged in 2 views: x and x’ X, x, x’ and the camera centre C are coplanar in the plane p The rays back-projected from x and x’ meet at X

3
Point correspondence geometry
Fig. 8.1 Point correspondence geometry

4
Point correspondence geometry

5
Epipolar Geometry Fig. 8.2

6
Epipolar geometry

7
The geometric entities involved in epipolar geometry

8
Fig 8.3

9
Converging cameras

10
Fig 8.4

11
Motion parallel to the image plane

12
Fig. 8.5 Geometric derivation

13
Point transfer via a plane

14
The fundamental matrix F
x l’ Geometric Derivation Step 1: Point transfer via a plane There is a 2D homography Hp mapping each xi to xi’ Step 2: Constructing the epipolar line

15
Constructing the epipolar line

16
Cross products If a = ( a1, a2 , a3)T is a 3-vector, then one define a corresponding skew-sysmmetric matrix as follows:
T is a 3-vector, then one define a corresponding skew-sysmmetric matrix as follows:")
17
Cross products 2 Matrix [a]x is singular and a is its null vector
a x b = ( a2b3 - a3b2, a3b1 - a1b3 , a1b2 – a2b1)T a x b = [a]x b =( aT [b]x )T
![Cross products 2 Matrix [a]x is singular and a is its null vector](http://slideplayer.com/slide/5045797/16/images/17/Cross+products+2+Matrix+%5Ba%5Dx+is+singular+and+a+is+its+null+vector.jpg "a x b = ( a2b3 - a3b2, a3b1 - a1b3 , a1b2 – a2b1)T. a x b = [a]x b =( aT [b]x )T.")
18
Algebraic derivation

19
Algebraic derivation 2

20
Example 8.2

21
Example 8.2 b

22
Properties of the fundamental matrix (a)
")
23
Properties of the fundamental matrix (b)
")
24
Summary of the Properties of the fundamental matrix 1

25
Summary of the properties of the fundamental matrix 2

26
Epipolar line homography 1
Fig. 8.6a Epipolar line homography 1

27
Epipolar line homography 2
Fig. 8.6 b Epipolar line homography 2

28
Epipolar line homography

29
The epipolar line homography

30
A pure camera motion

31
Pure translation

32
Fig. 8.8

33
Pure translation motion

34
Example of pure translation

35
Fig. 8.9 General camera motion

36
General camera motion

37
Example of general motion

38
Pure planar motion

39
Retrieving the camera matrices Using F to determine the camera matrices of 2 views
Projective invariance and canonical cameras Since the relationships l’ = Fx and x’ F x = 0 are projective relationships which

40
Projective invariance and canonical cameras
The camera matrix relates 3-space measurements to image measurements and so depends on both the image coordinate frame and the choice of world coordinate frame. F is unchanged by a projective transformation of 3-space.

41
Projective invariance and canonical cameras 2

42
Canonical form camera matrices

43
Projective ambiguity of cameras given F

44
Projective ambiguity of cameras given F 2

45
Projective ambiguity of cameras given F 3

46
Canonical cameras given F

47
Canonical cameras given F 2

48
Canonical cameras given F 3

49
Canonical cameras given F 4

50
The Essential Matrix

51
Normalized Coordinates

52
Normalized coordinates 2

53
Normalized coordinates 3

54
Properties of the Essential Matrix

55
Result 8.17 on Essential matrix

56
Result 8.17 on Essential matrix 2

57
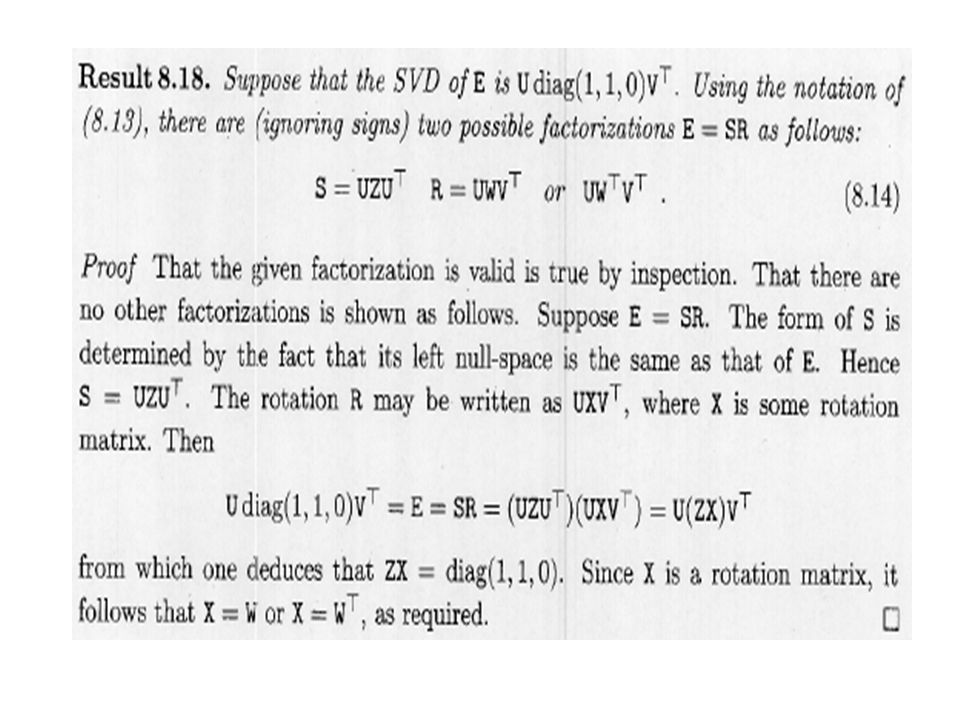
Extraction of cameras from the Essential Matrix

59
Determine the t part of the camera matrix P’

60
Result 8.19

61
Geometrical interpretation of the four solutions

62
Geometrical interpretation of the four solutions 2

63
The 4 possible solutions for calibrated reconstruction from E

Similar presentations







![Relations between image coordinates Given coordinates in one image, and the tranformation Between cameras, T = [R t], what are the image coordinates In.](/15/4817388/big_thumb.jpg "Relations between image coordinates Given coordinates in one image, and the tranformation Between cameras, T = [R t], what are the image coordinates In.>")





Correspondence geometry: Given an image point x in the first view, how does this constrain the position of the corresponding point.>")





