Download presentation
Presentation is loading. Please wait.

1
S INGLE -I MAGE R EFOCUSING AND D EFOCUSING Wei Zhang, Nember, IEEE, and Wai-Kuen Cham, Senior Member, IEEE

2
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

3
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

4
I NTRODUCTION One is image refocusing, which is to recover the sharpness of the blurry defocused objects in an input image and to generate a virtual all-focused image. The other is defocusing, which is to blur an image and to create defocus effects. The major novelty of this paper is introducing a tractable SBD framework, which can apply separately these two constraints to ensure image sharpness and to suppress ring artifacts.

5
I NTRODUCTION (a) Input narrow-aperture image focusing on the foreground object. (b) Synthesized image with shallower DOF. (c) Synthesized all-focused image. (d) Synthesized image focusing on the background. (e) Detected focus mask (white: defocused regions, black: focused regions, gray: focus boundaries). (f) Close-up comparison. Left: removing the lens blur using the lens deblurring in smart sharpen of Photoshop. Right: Our refocused result.
 Synthesized image with shallower DOF. (c) Synthesized all-focused image. (d) Synthesized image focusing on the background. (e) Detected focus mask (white: defocused regions, black: focused regions, gray: focus boundaries). (f) Close-up comparison. Left: removing the lens blur using the lens deblurring in smart sharpen of Photoshop. Right: Our refocused result..")
6
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

7
B ACKGROUND A ND P ROBLEM F ORMULATION Image Model Such blurring process is often modeled as the convolution of the focused image F with PSF. I denotes the defocused image and n is the noise term

8
B ACKGROUND A ND P ROBLEM F ORMULATION Due to the diffraction and aberration of the camera lens, the PSF is approximated normally by a 2-D Gaussian filter, given by The spread parameter, which is related to the distance of the object to the focal plane, determines the blurriness of the captured image.

9
B ACKGROUND A ND P ROBLEM F ORMULATION Edge Modeling A step edge x 0 at can be represented by e(x;b,c,x 0 ) = cU(x - x 0 ) + b, where U( ‧ ) is the unit step function. b denotes the edge basis. c represents the edge contrast.

10
B ACKGROUND A ND P ROBLEM F ORMULATION The typical edge s(x;b,c,w,x 0 ) can be regarded as a smoothed step edge e(x;b,c,x 0 ), which is obtained by convolving with the 1-D Gaussian filter and therefore is as follows Parameters
 can be regarded as a smoothed step edge e(x;b,c,x 0 ), which is obtained by convolving with the 1-D Gaussian filter and therefore is as follows Parameters")
11
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

12
E DGE -B ASED F OCUS -M AP E STIMATION Based on the above edge model, a method is proposed in this section to estimate automatically the focus map for an image containing a mixture of focused and defocused objects. Our proposed method is also based on this assumption and thus shares the common limitation that it cannot estimate an accurate focus map for natural blurry objects such as clouds and shadows. By contrast, our proposed method is simpler and has lower computational complexity since all edge parameters are derived in closed form.

13
E DGE -B ASED F OCUS -M AP E STIMATION

14
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

15
I MAGE R EFOCUS B Y B LIND D ECONVOLUTIOB 1) It is utilized for PSF estimation. 2) An edge sharpness prior is developed to constrain the PSF not to blur the edges and enforce the refocusing image to agree with the precalculated sharpened image in the vicinity of edges. 3) The proposed SBD method will be presented by assuming that the PSF is spatially invariant for the sake of simplicity.
 An edge sharpness prior is developed to constrain the PSF not to blur the edges and enforce the refocusing image to agree with the precalculated sharpened image in the vicinity of edges. 3) The proposed SBD method will be presented by assuming that the PSF is spatially invariant for the sake of simplicity..")
16
I MAGE R EFOCUS B Y B LIND D ECONVOLUTIOB Let be F the refocused image of the blurry image I. F Is expected to satisfy two conditions: (1) The edges should become sharpened in F (2) The locally smooth regions in I should remain almost unchanged in F.
 The edges should become sharpened in F (2) The locally smooth regions in I should remain almost unchanged in F..")
17
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

18
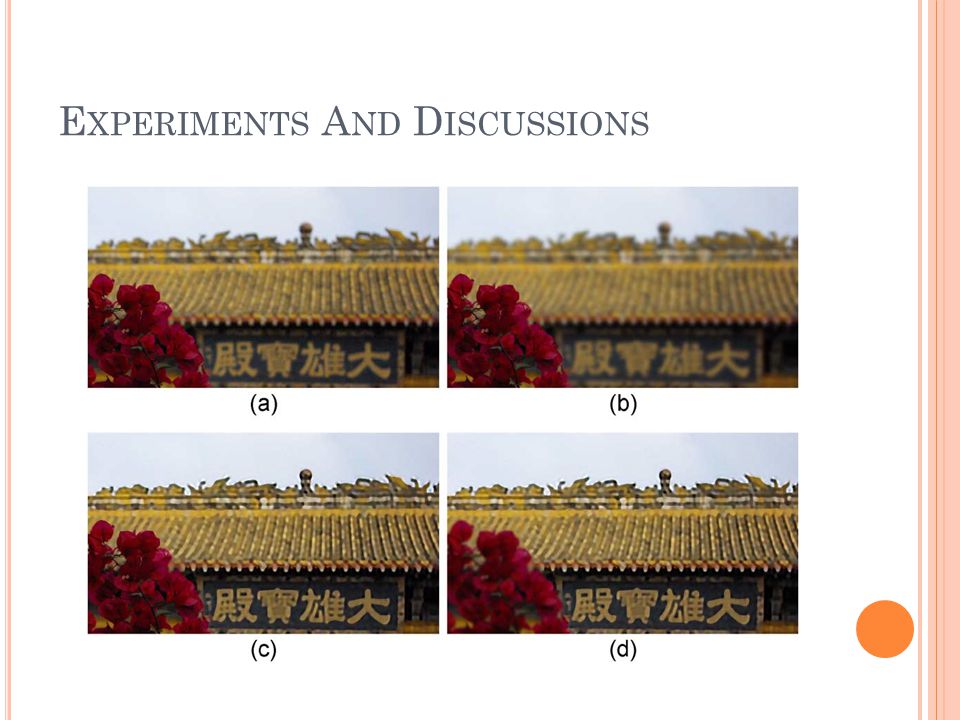
E XPERIMENTS A ND D ISCUSSIONS (a) Estimated focus map. (b) Blurriness of the pixels at the dashed line of (a). (c) Segmentation result based on (a).
 Blurriness of the pixels at the dashed line of (a). (c) Segmentation result based on (a)..")
19
E XPERIMENTS A ND D ISCUSSIONS

21
O UTLINE Introdution Background And Problem Fomulation Edge-Based Focus-Map Estimation Image Refocusing By Blind Deconvolution Experiment And Discussions Conclusion

22
C ONCLUSION The proposed SBD is free of user initialization and has low computational complexity. A wide variety of images has been tested to validate the proposed algorithm. In the future, we intend to use optimized GPU programming to accelerate further the speed of the algorithm. Finally, we would like to extend the basic idea of this paper to solve other low-level vision problems such as spatially variant deblurring.

23
T HANK YOU FOR YOUR LISTENING

Similar presentations


>")





 01/16/2011 Key words: image deblur,>")



 Shengcai Liao, Guoying Zhao, Vili Kellokumpu,>")






