Download presentation
Presentation is loading. Please wait.

1
PIEZOELECTRIC ULTRASONIC MOTOR
BY NEENA SKARIA Edited By Sarath S Nair

2
CONTENTS Need for USM Principle of operation Working of USM
Travelling wave USM Equivalent circuit of USM Speed characteristics of USM Comparison with electromagnetic motor Conclusion Reference

3
NEED FOR USM For applications such as industrial, medical, robotic, space, automotive etc market research indicates that tiny motors smaller than 1 cm3 is of great demand. Electromagnetic motors smaller than 1 cm3 are difficult to produce with sufficient energy efficiency. With smaller parts, an increasing percentage of power is converted into heat instead of motion. A new class of motors using high power ultrasonic energy— ultrasonic motors—is gaining widespread attention

4
Ultrasonic motor USM is newly developed motor that uses ultrasonic vibration of a piezoelectric material as its drive source. The working frequency of ultrasonic motor ranges from 20Khz to 10Mhz (quiet in operation ). The torque of an USM is 10 to 100 times larger than electromagnetic motors of the same size or weight USM are emerging as an alternative to electromagnetic motors where miniaturization, low power use, and high reliability are required.
. The torque of an USM is 10 to 100 times larger than electromagnetic motors of the same size or weight. USM are emerging as an alternative to electromagnetic motors where miniaturization, low power use, and high reliability are required.")
5
converse PIEZOELECTRIC EFFECT
Basic principle of operation –converse piezoelectric effect the production of stress / strain when an electric field is applied to a piezoelectric material.

6
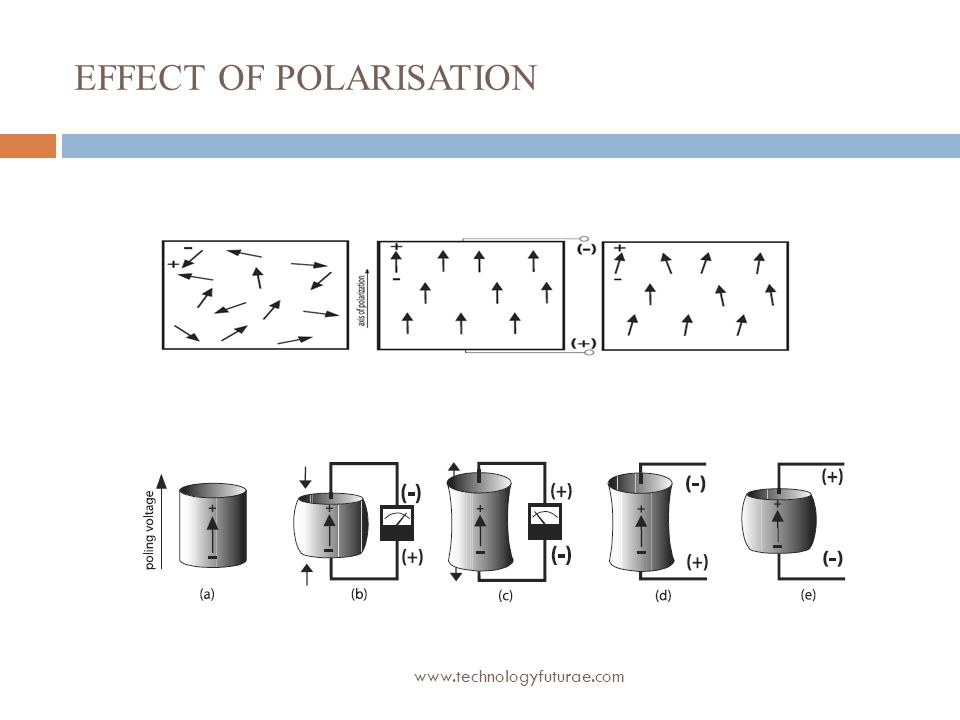
Effect of polarisation
7
If a voltage of the same polarity as the poling voltage is applied to a ceramic element, in the direction of the poling voltage, the element will lengthen and its diameter will become smaller. If a voltage of polarity opposite that of the poling voltage is applied, the element will become shorter and broader. If an alternating voltage is applied, the element will lengthen and shorten cyclically, at the frequency of the applied voltage

8
OPERATION OF USM

9
In the operation of the USMs two-stage energy conversion is formed.
1)Electromechanical energy conversion electrical energy is converted into mechanical energy by excitation of the piezoelectric ceramic with ultrasonic range frequency. 2)mechanical energy conversion mechanical vibrations are converted to linear or rotary motion by friction force generated in stator–rotor interface.
Electromechanical energy conversion. electrical energy is converted into mechanical energy by excitation of the piezoelectric ceramic with ultrasonic range frequency. 2)mechanical energy conversion. mechanical vibrations are converted to linear or rotary motion by friction force generated in stator–rotor interface.")
10
CLASSIFICATION There are various categories to classify ultrasonic motors such as (1) Operation: Rotary type and linear type (2) Device geometry: Rod type, π-shaped, ring and cylinder types (3) Generating wave: Standing wave type and travelling wave type.
 Device geometry: Rod type, π-shaped, ring and cylinder types. (3) Generating wave: Standing wave type and travelling wave type.")
11
Direction of USM opposite to direction of travelling wave
TRAVELLING WAVE USM Direction of USM opposite to direction of travelling wave

12
The ellipse of movement allows us to calculate speed of rotor
The velocity in the highest point of ellipse determines the speed of contact between stator and rotor which is the speed of the rotor itself

13
GENERATION OF TRAVELLING WAVE
Standing wave is expressed as u s (x, t) = A cos kx . cos ωt Travelling wave is expressed as u t (x, t) = A cos ( kx – ωt) Using a trigonometric relation, u t (x, t) can be transformed as ut (x, t) = A cos kx . cos ωt + A cos ( kx – π/2) cos ( ωt -π/2) Travelling wave can be generated by superimposing two standing waves whose phases differ by 90 degree from each other both in time and in space
 = A cos kx . cos ωt. Travelling wave is expressed as. u t (x, t) = A cos ( kx – ωt) Using a trigonometric relation, u t (x, t) can be transformed as. ut (x, t) = A cos kx . cos ωt + A cos ( kx – π/2) cos ( ωt -π/2) Travelling wave can be generated by superimposing two standing waves whose phases differ by 90 degree from each other both in time and in space.")
14
ELECTRODE ARRANGEMENT

15
To generate a travelling-wave within the stator, it is necessary to have control of 2 mechanical orthogonal modes. Electrode pattern A provides cos(kθ)and pattern B provides sin(kθ). By driving these 2 modes 90 degree out of phase temporally a travelling-wave is produced. Patterns A and B provide a standing wave individually. The superposition of standing waves produces a travelling-wave By changing the sign of one of the drives signals the direction of the travelling-wave and the direction of the rotor changes.
and pattern B provides sin(kθ). By driving these 2 modes 90 degree out of phase temporally a travelling-wave is produced. Patterns A and B provide a standing wave individually. The superposition of standing waves produces a travelling-wave. By changing the sign of one of the drives signals the direction of the travelling-wave and the direction of the rotor changes.")
16
Relation b/w feedback electrode and speed
Feedback electrode produces high frequency AC voltage when mechanical vibrations act on the stator surface which is proportional to motor speed.

17
USR 60 (TRAVELLING WAVE USM)
USR 60 is rotary travelling wave USM nameplate of USR60 USM Drive frequency kHz Drive voltage Vrms Drive current 53mA Rated torque 0.4 Nm Rated power 4 W Rated speed 10 rad/s Weight 0.23 kg

18
ESTIMATION OF MOTOR CHARACTERISTICS
Three methods have proposed to estimate motor characteristics. 1)Finite element method-----( where no electrical parameters are considered). 2)Energy conversion method (which is too complicated to estimate motor characteristics under different driving frequencies). 3) Equivalent circuit model (ECM) If there is a sufficiently applicable equivalent circuit model (ECM) for expression of practical operations of the USMs, it will be very useful for the design and the estimation of motor characteristics.
Finite element method-----( where no electrical parameters are considered). 2)Energy conversion method (which is too complicated to estimate motor characteristics under different driving frequencies). 3) Equivalent circuit model (ECM) If there is a sufficiently applicable equivalent circuit model (ECM) for expression of practical operations of the USMs, it will be very useful for the design and the estimation of motor characteristics.")
19
F = force at mechanical terminal
EQUIVALENT CIRCUIT Where, F=AV-Zv I=YdV+Av Yd=1/jwCd A = force factor F = force at mechanical terminal v = velocity at the mechanical terminal Z= the mechanical impedance of piezoelectric ceramic

20
Equivalent circuit of USM
Cd=damping capacitance Lm=motional inductance=m/A 2 Cm=motional capacitance=A 2/s ro= Internal resistor=r/A 2

21
Where s =spring constant of stator,
m= mass of metal assembly and ceramic of stator, A =force factor r = mechanical resistance USM should be driven at frequency creating resonance between Cm and Lm in the equivalent circuit. The mechanical resonance frequency is expressed as

22
Damping admittance Yd and motional admittance Ym of the equivalent circuit are found as follows
Current flowing into the motional branch causes motor movement called motional current, which is expressed by Im= V×Ym

23
EQUIVALENT CIRCUIT PARAMETERS OF USR60
Cd = 9 nF rd = 20 k Lm = 0.1 H r0 = 150 Cm = 168 Pf

24
SPEED characteristics of twusm
Speed of USM is time varying due to changes in 1)temperature - internal losses - frictional interface b/w stator & rotor 2)drive operating conditions -driving frequency, -source voltage -load torque.
temperature. - internal losses. - frictional interface b/w stator & rotor. 2)drive operating conditions. -driving frequency, -source voltage. -load torque.")
25
SPEED FREQUENCY CHARACTERISTIC
Speed of USR60 is controlled in kHz frequency range

26
EFFECT OF TEMPERATURE AND LOAD CONDITION

27
SPEED CONTROL Speed of an ultrasonic motor can be contolled in 3 ways 1)drive frequency control, 2)applied voltage control, 3) phase difference control of applied voltages
drive frequency control, 2)applied voltage control, 3) phase difference control of applied voltages")
28
Comparison with electromanetic motor
simple structure faster response time smaller packaging capability high torque at low speed high dynamic resolution very low inertia high power to weight ratio low speed without additional gear or spindle mechanisms,

29
good control characteristics at start and stop
noiseless operation good control characteristics at start and stop high dynamics and very good positioning accuracy require no winding. not affected by magnetic field

30
Necessity for a high frequency power supply.
limitations They suffer from potential wear at the rotor / stator interface due to friction which tends to shorten service life Necessity for a high frequency power supply. Sensitive to temperature variations. Difficult to derive a complete mathematical model of USM.

31
APPLICATIONS Computer disc drives Camera autofocus Robotic positioning
Pharmaceuticals handling Medical cathetes placement Micropositioning stages Fibre optic positioning Manufacturing process control Semiconductor test equipment

32
SUMMARY This paper focuses on a new class of motors using high power ultrasonic energy—ultrasonic motors. Equivalent circuit for an ultrasonic motor is developed. The operation and characteristics of a travelling wave USM is discussed taking into consideration USR60 Piezoelectric motors are emerging as an alternative to electromagnetic motor where miniaturization, low power use, and high reliability are required. USMs are presently being widely used for industrial, medical, robotic, space and automotive applications

33
REFERENCE [1] Güngör Bal Erdal Bekiroglu “Characteristics Estimation Of Travelling-Wave Ultrasonic Motor Using Equivalent Circuit Model” Eleco’2001 International Conference on Electrical and Electronics Engineering 7-11 November 2001, Bursa/TURKEY [2] Yoichi Ogahara, Takashi Maeno”Torque Characteristics Analysis of a Travelling Wave Type Ultrasonic Motor Impressed High Load Torque in Low Speed Range” IEEE International Ultrasonics, Ferroelectrics, and Frequency Control Joint 50th Anniversary Conference2004 [3] Ming Hao and Weishan Chen ” Analysis and Design of a Ring-type Traveling Wave Ultrasonic Motor” Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation June , 2006, Luoyang, China [4] Güngör Bal, Member, IEEE, and Erdal Bekiro˘glu, “A Highly Effective Load Adaptive Servo Drive System for Speed Control of Travelling-Wave Ultrasonic Motor”, IEEE Transactions On Power Electronics, Vol. 20, No. 5, September [5]
![REFERENCE [1] Güngör Bal Erdal Bekiroglu Characteristics Estimation Of Travelling-Wave.](http://slideplayer.com/slide/3227718/11/images/33/REFERENCE+%5B1%5D+G%C3%BCng%C3%B6r+Bal+Erdal+Bekiroglu+Characteristics+Estimation+Of+Travelling-Wave..jpg "Ultrasonic Motor Using Equivalent Circuit Model Eleco’2001 International. Conference on Electrical and Electronics Engineering 7-11 November 2001, Bursa/TURKEY. [2] Yoichi Ogahara, Takashi Maeno Torque Characteristics Analysis of a. Travelling Wave Type Ultrasonic Motor Impressed High Load Torque in Low. Speed Range IEEE International Ultrasonics, Ferroelectrics, and Frequency. Control Joint 50th Anniversary Conference2004. [3] Ming Hao and Weishan Chen Analysis and Design of a Ring-type Traveling. Wave Ultrasonic Motor Proceedings of the 2006 IEEE International Conference. on Mechatronics and Automation June , 2006, Luoyang, China. [4] Güngör Bal, Member, IEEE, and Erdal Bekiro˘glu, A Highly Effective Load. Adaptive Servo Drive System for Speed Control of Travelling-Wave Ultrasonic. Motor , IEEE Transactions On Power Electronics, Vol. 20, No. 5, September [5]")
34
Log On to www.technologyfuturae.com
Technical Presentations, Research Reviews, New designs & Developments Technology Futurae Log On to

35
THANK YOU

Similar presentations


>")





>")










