Download presentation
Presentation is loading. Please wait.

1
Assessing Uncertainties in Radiative Shock Modeling James Paul Holloway University of Michegan Joslin Goh, Mike Grosskopf, Bruce Fryxell, Derek Bingham Uncertainty in Computer Modeling – Sheffield 2012 Supported by DOE NNSA/ASC under the Predictive Science Academic Alliance Program DEFC52-08NA28616 Michigan

2
Shock waves become radiative when … radiative energy flux would exceed incoming material energy flux Setting these fluxes equal gives a threshold velocity of 60 km/s for our system: Materialxenon gas Density 6.5 mg/cc Initial shock velocity200 km/s shocked unshocked preheated T s 4 ∝ u s 8 o u s 3 /2 Initial ion temperature 2 keV Typ. radiation temp. 50 eV 2

3
The CRASH problem in the lab 1 ns, 3.8 kJ laser irradiates Be disk Launches shock at 200km/s through Be into Xe-filled tube ~4mm long and.6 to 1.2 mm diameter Shock reaches 2 mm in 20 ns

4
System is observed with x-ray radiography 1 ns, 3.8 kJ laser irradiates Be disk

5
We have several outputs & inputs Outputs ( ) Shock location Shock breakout time Wall shock location Axial centroid of Xe Area of dense Xe Inputs ( ) Observation time Laser energy Be disk thickness Xe fill gas pressure Tube geometry Calibration parameters ( ) Vary with model Electron flux limiter Laser scale factor … Shock location Centroid of dense Xe Area of dense Xe Fixed window Wall shock location
 Shock location Shock breakout time Wall shock location Axial centroid of Xe Area of dense Xe Inputs ( ) Observation time Laser energy Be disk thickness Xe fill gas pressure Tube geometry Calibration parameters ( ) Vary with model Electron flux limiter Laser scale factor … Shock location Centroid of dense Xe Area of dense Xe Fixed window Wall shock location")
6
We can measure and we can compute 600 µm 1200 µm Circular Elliptical tube tube nozzle nozzle 13 ns MG 26 ns gray Goal is to predict outputs for elliptical tube and uncertainty, without using any data from elliptical tube experiments

7
We need to move models into new regions of input Measurements Variability in true response True mean response Simulator response pdf at desired input x x Note: measurement might be of secondary response!

8
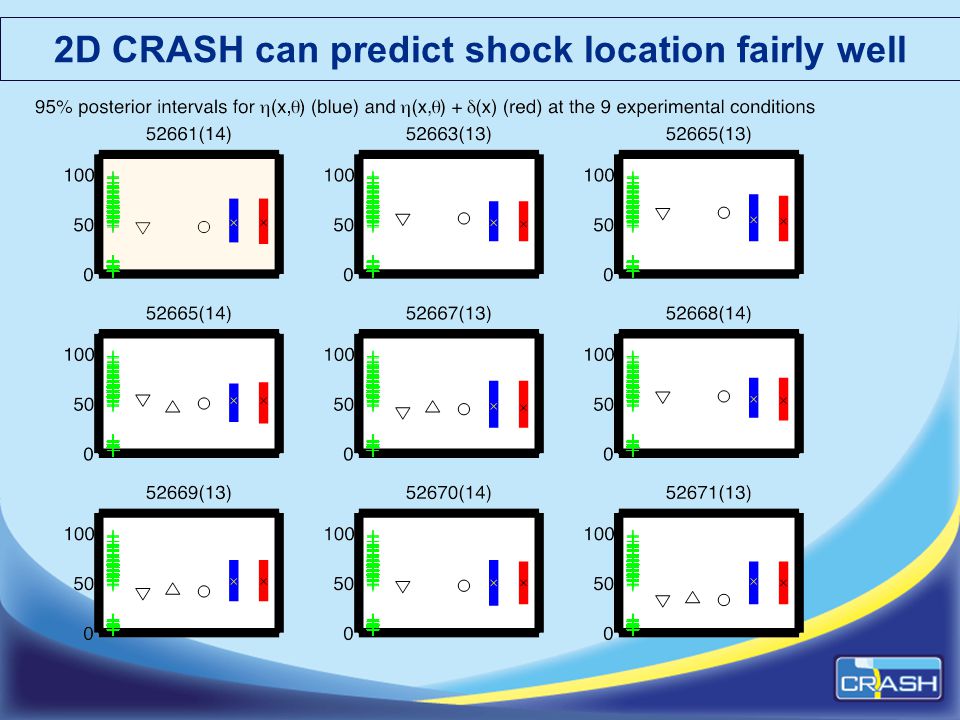
2D CRASH can predict shock location fairly well

10
Selection of output matters a lot for calibration

11
Tales from the trenches We challenge the measurements in ways the surprise, but seldom delight, the experimental team We stress the code in ways the surprise, but seldom delight, the code developer and modeling team Explorations of extrapolation – calibrating with one data set and predicting in an unexplored region of input, or predicting a different output Exploration of combining models – calibrating across model fidelity

12
Do we understand the uncertainty in inputs? Note day-to-day uncertainty vs. within day uncertainty 12 Omega laser energy has unexpected variability Raises an argument: what is prediction? Omega improved in response to this… but

13
Calibrating across two simulation codes We have 1024 BOT from 1D simulations We have 104 BOT from 2D simulations Can we combine these 1D and 2D runs? Note that the 1D code and 2D code have: Some thetas that are the same: electron flux limiter Some that are different: 1D – Laser Energy Scale Factor 2D – Be-Gamma and Plastic Opacity Scale Factor Need a model structure to combine these

14
Combining two simulation codes Theta values put in 1D code only Common theta values put in 1D code 1D-theta tuned to 2D code Theta values in 2D code only Tuned values of theta

15
Leave one out predictions of BOT 1D sims 2D sims Measurement Tuned 1D Tuned 2D Tuned prediction

16
We have learned a few things… The distributions of inputs are often not well known, and are not fixed… Quantities that calibrate well in one model might not in another (e.g. EFL in 1D vs. 2D) Calibration on one output may be very different from calibration on another. This is a physics problem. We need ways to extrapolate from one region of input to another. Physics should help with this. There is a real need to combine models when neither is “better” Culture change matters. More important than tools
 Calibration on one output may be very different from calibration on another. This is a physics problem. We need ways to extrapolate from one region of input to another. Physics should help with this. There is a real need to combine models when neither is better Culture change matters. More important than tools.")
17
Thanks!

18
Our primary goal is to predict QOI in the oval tube Use all available simulations & field data from circular tubes to create predictive interval for shock location in oval tube Perform O(10) experiments on the nominal target design and confirm that expected fraction the observations are within predicted interval Oval tube field data will never be used for predictive model construction Discrepancy is assumed independent of eccentricity & nozzle geometry Necessary to transfer discrepancy from circular tubes to oval tubes in absence of field measurements We will have only a few field experiments with a circular nozzle 18
 experiments on the nominal target design and confirm that expected fraction the observations are within predicted interval Oval tube field data will never be used for predictive model construction Discrepancy is assumed independent of eccentricity & nozzle geometry Necessary to transfer discrepancy from circular tubes to oval tubes in absence of field measurements We will have only a few field experiments with a circular nozzle 18")
19
Convergence study (RS5) Most parameters showed no problem But spatial mesh and number of groups raised concerns and show interaction Identified need to improve several aspects of solver: treatment of electron/photon coupling preconditioner efficiency Code improved in response to this
 Most parameters showed no problem But spatial mesh and number of groups raised concerns and show interaction Identified need to improve several aspects of solver: treatment of electron/photon coupling preconditioner efficiency Code improved in response to this")
20
Calibration using Breakout Time (BOT) Model 1: Predicting SL at 20 and 26 ns Assessing Shock Location (SL) prediction Prediction and estimate of uncertainty Move discrepancy and replication error to new region of inputs small model calibrates
 Model 1: Predicting SL at 20 and 26 ns Assessing Shock Location (SL) prediction Prediction and estimate of uncertainty Move discrepancy and replication error to new region of inputs small model calibrates")
21
Leave one out predictions tell us how we are doing 2008 SL experiments 2009 BOT experiments

22
We can now compare with measurement Median Shock Location 2750 m 2741 m @ 20 ns 3200 m 3442 m @ 26 ns

23
Predictive intervals for shock locations (4 examples) This demonstrates the ability to combine models We will be combining 2D, 3D, Gray and Multigroup models to predict the oval tube experiment 23 1D 2D 1D calibrated2D calibrated Full Model Field
 This demonstrates the ability to combine models We will be combining 2D, 3D, Gray and Multigroup models to predict the oval tube experiment 23 1D 2D 1D calibrated2D calibrated Full Model Field")
24
How do we launch the shock? 300 times too slow

25
Calibrated on break out time

Similar presentations














 T. Haftka and Nam-Ho Kim Department of Mechanical & Aerospace Engineering, University.>")




