Download presentation
Presentation is loading. Please wait.

1
NONLINEAR DYNAMIC FINITE ELEMENT ANALYSIS IN ZSOIL : with application to geomechanics & structures Th.Zimmermann copyright zace services ltd

2
Far-field BC needed 2-phase medium Ground motion

3
For time being in Z_Soil: limited structural dynamics
a, or d t

4
with some extensions analysis by geomod

5
STATICS RECALL

6
STATIC EQUILIBRIUM STATEMENT, 1-PHASE
Boundary value problem displacement imposed on u Equilibrium 12 +(12 /x2)dx2 12 f1 traction imposed on 11 11+(11/x1)dx1 x2 x1 dx1 direction 1: (11/x1)dx1dx2+(12 /x2) dx1dx2+ f1dx1dx2=0 L(u)= ij/xj + fi=0 (Differential equation of equilibrium)
dx2. 12. f1. traction imposed. on 11. 11+(11/x1)dx1. x2. x1. dx1. direction 1: (11/x1)dx1dx2+(12 /x2) dx1dx2+ f1dx1dx2=0. L(u)= ij/xj + fi=0. (Differential equation. of equilibrium)")
7
FORMAL DIFFERENTIAL PROBLEM STATEMENT
1-phase,linear or nonlinear) (equilibrium) (displ.boundary cond.) (traction bound. cond.) Incremental elasto-plastic constitutive equation: NB: Time is steps
 (equilibrium) (displ.boundary cond.) (traction bound. cond.) Incremental elasto-plastic constitutive equation: NB: Time is steps.")
8
Kd=F MATRIX FORM -DISCRETIZATION LEADS TO THE MATRIX FORM….
FOR LINEAR STATICS Kd=F ( K=stiffness matrix, F=vector of nodal forces d=vector of nodal displacements)
")
9
DYNAMICS

10
DYNAMIC EQUILIBRIUM STATEMENT, 1-PHASE
Boundary value problem displacement imposed on u Equilibrium traction imposed on 12 +(12 /x2)dx2 12 f1 11 11+(11/x1)dx1 x2 x1 dx1 direction 1: (11/x1)dx1dx2+(12 /x2) dx1dx2+ f1dx1dx2=0 L(u)= ij/xj + fi=0
dx2. 12. f1. 11. 11+(11/x1)dx1. x2. x1. dx1. direction 1: (11/x1)dx1dx2+(12 /x2) dx1dx2+ f1dx1dx2=0. L(u)= ij/xj + fi=0.")
11
FORMAL DIFFERENTIAL PROBLEM STATEMENT
Deformation(1-phase): (equilibrium) (displ.boundary cond.) (traction bound. cond.) (initial conditions) Incremental elasto-plastic constitutive equation: NB: Time is real
: (equilibrium) (displ.boundary cond.) (traction bound. cond.) (initial conditions) Incremental elasto-plastic constitutive equation: NB: Time is real.")
12
Kd=F Ma(t)+[Cv(t)]+Kd(t) =F(t) COMPARING MATRIX FORMS STATICS
(linear case) Kd=F We obtain (Linear system size: Ndofs=Nnodes x NspaceDim, -d=nodal displacements -F=nodal forces) DYNAMICS (linear case) Ma(t)+[Cv(t)]+Kd(t) =F(t) where We obtain (Linear system size: Ndofs=Nnodes x NspaceDim, But 3xNdofs unknowns) optional
![Kd=F Ma(t)+[Cv(t)]+Kd(t) =F(t) COMPARING MATRIX FORMS STATICS](http://slideplayer.com/slide/1508119/5/images/12/Kd%3DF+Ma%28t%29%2B%5BCv%28t%29%5D%2BKd%28t%29+%3DF%28t%29+COMPARING+MATRIX+FORMS+STATICS.jpg "(linear case) Kd=F. We obtain. (Linear system size: Ndofs=Nnodes x NspaceDim, -d=nodal displacements. -F=nodal forces) DYNAMICS. (linear case) Ma(t)+[Cv(t)]+Kd(t) =F(t) where. We obtain. (Linear system size: Ndofs=Nnodes x NspaceDim, But 3xNdofs unknowns) optional.")
13
SOLUTION TECHNIQUES -MODAL ANALYSIS -FREQUENCY DOMAIN ANALYSIS both essentially restricted to linear problems -DIRECT TIME INTEGRATION appropriate for a fully nonlinear analysis

14
DIRECT TIME INTEGRATION (linear case)…a)
Using Newmark’s algorithm : At each time step, solve:

15
DIRECT TIME INTEGRATION (linear case)…b)
…b)")
16
Ma(t)+Cv(t)+Kd(t)=F(t) >>>>
MATRIX FORMS STATICS (linear case) Kd=F DYNAMICS (linear case) Ma(t)+Cv(t)+Kd(t)=F(t) >>>> at any tn+1 we have an equivalent static problem K*dn+1=F*n+1 an+1=………… vn+1=…………
 Kd=F. DYNAMICS. (linear case) Ma(t)+Cv(t)+Kd(t)=F(t) >>>> at any tn+1. we have an equivalent static problem. K*dn+1=F*n+1. an+1=………… vn+1=…………")
18
NEWMARK IS A 1-STEP ALGORITHM
All information to compute solution at time tn+1, is in solution at time tn , restart is easy

19
NUMERICAL ( ALGORITHMIC) DAMPING CAN EXIST
and varies with parameters (γ ,β) ● ● Newmark(0.6,0.3025) ● ● HHT ● ● ● ● Newmark(0.5,0.25) ● ● ● ● ● ● ● IT MAY BE WANTED OR NOT
 ● ● Newmark(0.6,0.3025) ● ● HHT. ● ● ● ● Newmark(0.5,0.25) ● ● ● ● ● ● ● IT MAY BE WANTED OR NOT.")
20
DISCRETIZATION APPROXIMATES HIGH FREQUENCIES
Exact sol.: Filtering of high frequencies may be desirable

21
HHT Hilber-Hughes-Taylor α method
HHT filters high frequencies without damping low frequencies

22
NUMERICAL ( ALGORITHMIC) DAMPING CAN EXIST
and varies with parameters (γ ,β) ● ● ● ● HHT(-0.3) ● ● ● ● ● ● ● ● ● ● ● IT MAY BE WANTED OR NOT
 ● ● ● ● HHT(-0.3) ● ● ● ● ● ● ● ● ● ● ● IT MAY BE WANTED OR NOT.")
23
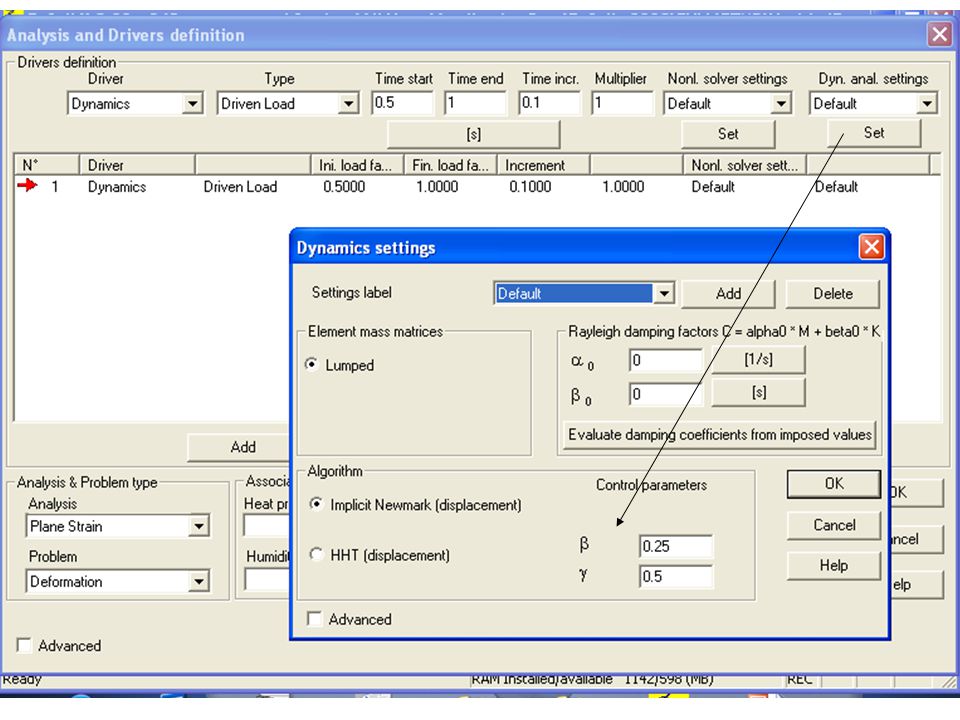
Algorithmic data for Newmark …or HHT(under CONTROL/AN..

24
Mass can be CONSISTENT (as obtained by FEM)
or LUMPED (concentrated at (some) nodes) Only lumped masses are available in ZSOIL Lumped masses tend to lead to underestimate frequencies
 nodes) Only lumped masses are available in ZSOIL. Lumped masses tend to lead to underestimate frequencies.")
25
Lumped masses tend to lead to underestimate frequencies:
ILLUSTRATION

26
C=αM+βK is RAYLEIGH DAMPING
RAYLEIGH DAMPING a) Recall: Ma(t)+Cv(t)+Kd(t)=F(t) C=αM+βK is RAYLEIGH DAMPING α,β:constants This form of damping is not representative of physical reality, in general. Its success is due to the fact that it maintains mode decoupling in modal analysis
 Recall: Ma(t)+Cv(t)+Kd(t)=F(t) C=αM+βK is RAYLEIGH DAMPING. α,β:constants. This form of damping is not representative of physical reality, in general. Its success is due to the fact that it. maintains mode decoupling in modal analysis.")
27
RAYLEIGH DAMPING b): PARENTHESIS ON MODAL ANALYSIS
: PARENTHESIS ON MODAL ANALYSIS")
28
RAYLEIGH DAMPING d) COMPARING THE MODAL EQUATION
WITH THE 1DOF VISCOUSLY DAMPED OSCILLATOR YIELDS:

29
RAYLEIGH DAMPING e)
")
30
RAYLEIGH DAMPING f) this can be plotted
 this can be plotted")
31
2 (ω,ξ) pairs are used to define α0,β0 in ZSOIL
 pairs are used to define α0,β0 in ZSOIL")
32
NONLINEAR DYNAMICS

33
CONSTITUTIVE MODEL: ELASTIC-PERFECTLY PLASTIC
1- dimensional E y this problem is non-linear

34
FROM LOCAL TO GLOBAL NONLINEAR RESPONSE

35
SOLUTION OF LINEARIZED PROBLEM, static case
Nonlinear problem to solve d Linearize at , w. Taylor exp. hence the following algorithm: i: iteration n: step

36
THE PROBLEM IS NONLINEAR & THEREFORE
NEEDS ITERATIONS tends to 0 Fn+1 Fn i: iteration n: step d

37
d Fn Fn+1 NEWTON- RAPHSON & al. ITERATIVES SCHEMES d Fn Fn+1 KTo 2.Constant stiffness,use KTo till i: iteration n: step 3.Modified NR, update KT opportunistically, each step e.g.,till 1.Full NR, update KT at each step & iteration, till 4. BFGS, “optimal”secant scheme

38
TOLERANCES ITERATIVE ALGORITHMS

39
Ma(t)+Cv(t)+N(d(t))=F(t)
MATRIX FORMS STATICS (nonlinear case) N(d)=F DYNAMICS (nonlinear case) Ma(t)+Cv(t)+N(d(t))=F(t) >>>> (e.g.)
 N(d)=F. DYNAMICS. (nonlinear case) Ma(t)+Cv(t)+N(d(t))=F(t) >>>> (e.g.)")
40
DIRECT TIME INTEGRATION (nonlinear case)
Using Newmark’s algorithm (or Hilber’s): At each time step, solve:
: At each time step, solve:")
41
Ma(t)+Cv(t)+N(d(t))=F(t) or Ma(t)+N(d,v)=F(t)
MATRIX FORMS STATICS (nonlinear case) N(d)=F DYNAMICS (nonlinear case) Ma(t)+Cv(t)+N(d(t))=F(t) or Ma(t)+N(d,v)=F(t) >>>>at any tn+1, we have an equivalent static problem N*(dn+1)=F*n+1 an+1=………… vn+1=………… Like for linear case
 N(d)=F. DYNAMICS. (nonlinear case) Ma(t)+Cv(t)+N(d(t))=F(t) or. Ma(t)+N(d,v)=F(t) >>>>at any tn+1, we have an equivalent static problem. N*(dn+1)=F*n+1. an+1=………… vn+1=………… Like for linear case.")
42
SEISMIC INPUT a >>> equilibrium >>Fin+Fdamp+Fel = Fext

43
SEISMIC INPUT b yields

44
Time-history

Similar presentations










 Begin deformable models!! Background on elasticity Elastostatics: generalized 3D springs Boundary integral formulation.>")








