Download presentation
Presentation is loading. Please wait.

1
Prepared byMIDHUN.T CHM S5

2
Aims at creating computational machines that have perceptual and sensory ability like those of human beings. Use camera and microphone to identify user actions and emotions

3
BLUE Bluetooth BLUE in the term stands for Bluetooth, which enables reliable wireless communication. EYES EYES, because the eye movement enables us to obtain a lot of interesting and important information.

4
To built a machine that can understand your emotions A pc that can listen, talk or scream Verify your identity, feels your presence and interact with you.

5
Emotion Mouse Manual And Gaze Input Cascaded (MAGIC) Artificial Intelligent Speech Recognition Simple User Interest Tracker (SUITOR)
 Artificial Intelligent Speech Recognition Simple User Interest Tracker (SUITOR)")
6
Simplest way People spend approximately1/3 of their total computer time touching input device Physiological data is obtained and emotional state is determined A user model will be built that reflects the personality of user.

7
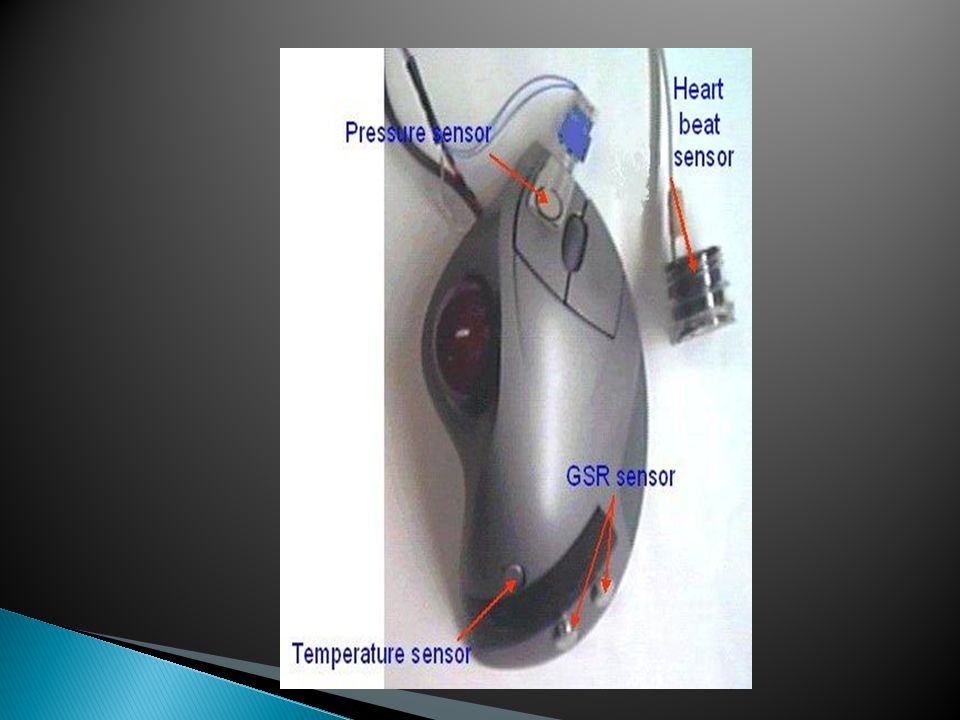
Measurement of heart rate, temperature, galvanic skin response (GSR), general somatic activity Six basic emotions are anger, fear, sadness, disgust, joy and surprise. Heart rate was measured with chest strap sensor, temperature with thermocouple attached to a digital multimeter (DMM), GSR also with DMM, somatic movement with computer mouse movements
, GSR also with DMM, somatic movement with computer mouse movements.")
12
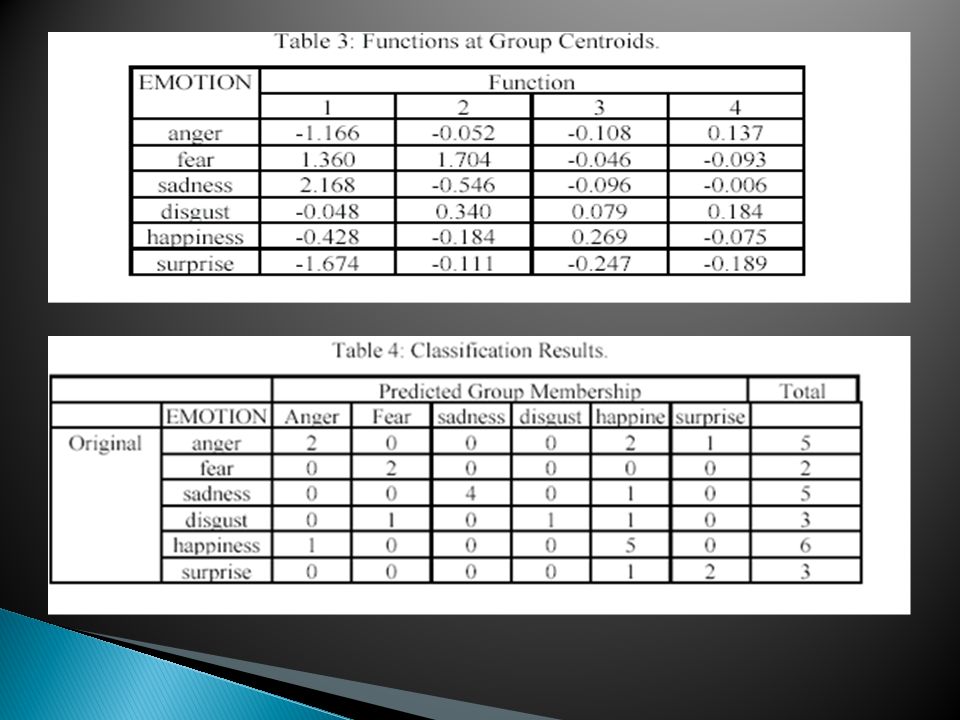
Firstly, a multidimensional procedure was used to determine dimensionality of data Fit the physiological similarities and dis- similarities into four dimensional table Secondly, discriminant function analysis was used to determine mathematic function that would distinguish the six emotional state. Suggest that all four physiological variables are sufficient to distinguish the six states

13
Such an approach, pointing appears to the user to be a manual task, used for fine manipulation and selection Reduce the cursor movement needed for target selection Click on the target with a regular manual input device Improvement over the traditional eye gaze system Reduce physical effort and fatigue, greater accuracy and naturalness and faster speed than traditional eye gaze system Two magic pointing techniques 1. Liberal 2. Conservative

14
To warp the cursor to every new object user looks at User take control of the target by hand near the target or ignore it and search for next “Pro active” since cursor wait on every potential target “over active” when user merely looking at the target

16
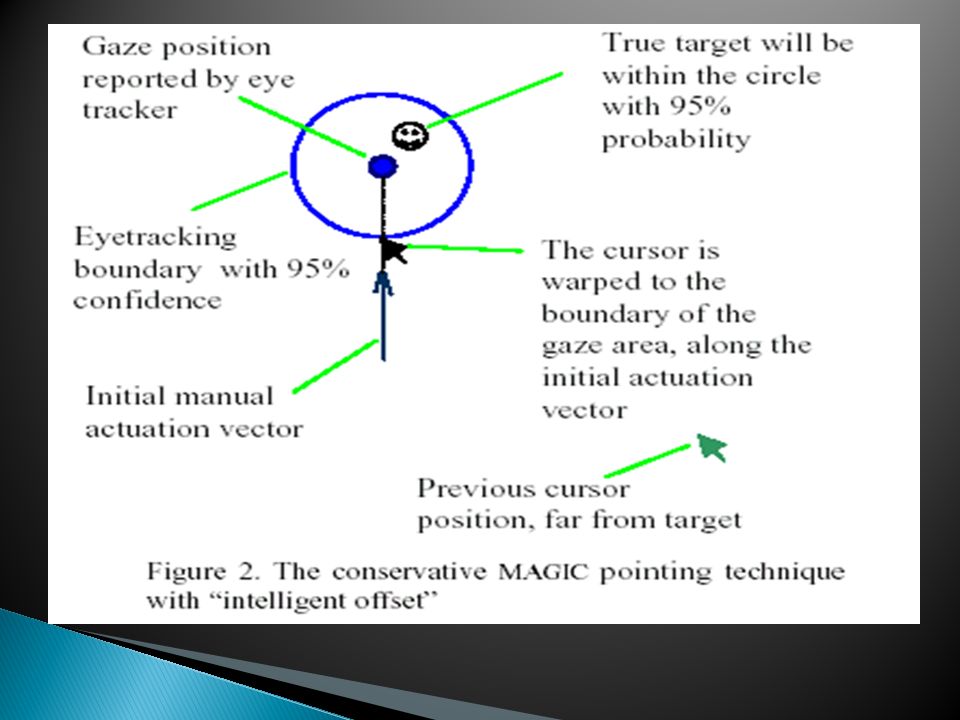
Does not warp the cursor target until the manual input device has been actuated Cursor is warped to gaze area reported by the eye tracker Steer the cursor towards the target to complete the target acquisition Cursor position is offset to the intersection of manual actuation vector and the boundary of gaze area

18
Reduction of manual stress and fatigue Practical accuracy level A more natural mental model for the user Faster than pure manual pointing Improved subjective speed and ease of use

19
Liberal approach is distracting when the user is trying to read The motor action computation cannot start until the cursor appears In conservative approach, uncertainty of the exact location prolong the target acquisition time

20
Rely on a single light source that is off or on the axis Illumination from an off axis source generate a dark pupil image On axis generate a bright pupil image Use two infrared time multiplexed light sources composed of two IR LED’s Pupil detection is realized by subtracting dark pupil image from bright pupil image After thresholding difference largest connected component is identified as pupil

21
Input words are scanned and matched against internally stored words Identification causes some action to be taken User speaks to the computer through microphone Filtered and fed to ADC and then stored in RAM Binary representation become standard, against which future are compared pattern matching is designed to look for the best fit because of variations in loudness, pitch, frequency difference, time gap etc.

22
To control weapons by voice commands Pilot give commands to computers by speaking into microphones For making airline and hotel reservations For making reservations, canceling reservations or making enquiries Can be connected to word processors and instead of writing, simply dictate to them

23
Help by fetching more information at desktop Notice where the user’s eyes focus on the screen Fills a scrolling ticker on a computer screen with information related to user’s task Ex. If reading headline,pops up the story in the browser window

24
POD Technology used in cars PONG A Robot

25
BLUE EYES technology can be used : In retailing record and interpret customer movements In automobile industry In video games To create “Face Responsive Display” and “Perceptive Environment”

26
PProvide more delicate and user friendly facilities in computing devices GGap between the electronic and physical world is reduced TThe computers can be run using implicit commands instead of the explicit commands “ T TT THIS IS ONLY A TECHNOLOGICAL FORECAST ”

27
Thank u… A N Y Q U E S T I O N S ? ? ?

Similar presentations