Download presentation
Presentation is loading. Please wait.

1
Spatial point patterns and Geostatistics an introduction
Marian Scott Sept 2007

2
Outline Spatial point processes Geostatistics The variogram
Spatial interpolation and prediction Sampling plans How to do it in R

3
Spatial point processes
‘A Spatial point process is a set of locations, irregularly distributed within a designated region and presumed to have been generated by some form of stochastic mechanism’ - Diggle (2003). A realisation from a spatial point process is termed a spatial point pattern – a countable collection of points {xi}. When we speak about an event, we mean a single observation xi from the process. We denote by N(A), the random variable representing the number of events in the region A. By a point, we simply mean any other arbitrary location.
. A realisation from a spatial point process is termed a spatial point pattern – a countable collection of points {xi}. When we speak about an event, we mean a single observation xi from the process. We denote by N(A), the random variable representing the number of events in the region A. By a point, we simply mean any other arbitrary location.")
4
Examples

5
Another example

6
What is the question? It is natural to ask the following question:
Does each point pattern differ from a random spatial pattern or complete spatial randomness? what do we mean by complete spatial randomness?.

7
Complete Spatial Randomness (CSR)
Given any spatial region A, CSR asserts that (i) conditional on N(A), the events in A are uniformly distributed over A. (ii) the random variable N(A) follows a Poisson distribution with mean |A|. In (ii) above, is termed the intensity, or the expected number of events per unit of area. A process satisfying (i) and (ii) is called a Spatial Poisson process (with intensity ).
 conditional on N(A), the events in A are uniformly distributed over A. (ii) the random variable N(A) follows a Poisson distribution with mean |A|. In (ii) above, is termed the intensity, or the expected number of events per unit of area. A process satisfying (i) and (ii) is called a Spatial Poisson process (with intensity ).")
8
Stationarity and isotropy
Space is like time (in a simple sense) in that our spatial processes should be stationary, but what about isotropy? Isotropy is: A process is said to be isotropic if the joint distribution of N(A1), ,N(Ak) is invariant to rotations. So in simple terms has to do with directions Note: The spatial Poisson process is both stationary and isotropic.
 in that our spatial processes should be stationary, but what about isotropy Isotropy is: A process is said to be isotropic if the joint distribution of N(A1), ,N(Ak) is invariant to rotations. So in simple terms has to do with directions. Note: The spatial Poisson process is both stationary and isotropic.")
9
Mean and variance equivalents
Called the first order and second order intensity functions They are the limiting behaviour of the expected value of N(A1) and covariance of N(A1), N(A2)
 and covariance of N(A1), N(A2)")
10
1st and 2nd order intensity functions
for stationary, isotropic processes: (x) = N(A)/ |A|. = But 2(x,y) not easy to describe in words, but easier to consider the K-function K(t)=1/ E{N0(t)}, where N0(t) is the number of events within a distance t of an arbitrary event.
 = N(A)/ |A|. = But 2(x,y) not easy to describe in words, but easier to consider the K-function. K(t)=1/ E{N0(t)}, where N0(t) is the number of events within a distance t of an arbitrary event.")
11
Why is the K-function useful?
K(t) =1/ E(number of events within a distance t of an arbitrary event) This suggests that for clustered patterns, K(t) will be relatively large for small values of t, since events are likely to be surrounded by further members of the same cluster. While for regularly spaced patterns, small values of t will give relatively small values of K(t) - here there is likely to be more empty space around events.
 =1/ E(number of events within a distance t of an arbitrary event) This suggests that for clustered patterns, K(t) will be relatively large for small values of t, since events are likely to be surrounded by further members of the same cluster. While for regularly spaced patterns, small values of t will give relatively small values of K(t) - here there is likely to be more empty space around events.")
12
The K-function can be used to assess CSR
For the case of a Poisson process, Kcsr(t) = t2. For the case of clustered patterns, we would expect for short distances t that K(t) > t2. For regular patterns, we would expect that for short distances t that K(t) < t2.
 = t2. For the case of clustered patterns, we would expect for short distances t that K(t) > t2. For regular patterns, we would expect that for short distances t that K(t) < t2.")
13
Estimating the K-function
K(t) =1/E(number of events within a distance t of an arbitrary event) First we need to estimate - the obvious estimator is hat = n/|A| we can estimate K(t) as an average over all points of the pattern, so using hat we can then estimate K(t) and plot this against the theoretical function for CSR (should be a straight line if CSR reasonable)
 =1/E(number of events within a distance t of an arbitrary event) First we need to estimate - the obvious estimator is hat = n/|A| we can estimate K(t) as an average over all points of the pattern, so using hat we can then estimate K(t) and plot this against the theoretical function for CSR (should be a straight line if CSR reasonable)")
14
Some examples

15
G(s) = F(s) = 1 - exp(-s2)
Other approaches Nearest neighbour methods - G-function The empirical distribution function of event-to-event nearest neighbours distances, G(·). Nearest neighbour methods - F-function The empirical distribution function of point-to-event nearest neighbour distances, F(·) Tests for CSR For a Poisson process (ie CSR) then the theoretical distribution functions G(s) = F(s) = 1 - exp(-s2)
. Nearest neighbour methods - F-function. The empirical distribution function of point-to-event nearest neighbour distances, F(·) Tests for CSR. For a Poisson process (ie CSR) then the theoretical distribution functions. G(s) = F(s) = 1 - exp(-s2)")
16
Further models for Spatial point processes
Poisson cluster process Inhomogeneous Poisson process Cox process Inhibition process

17
Another example

18
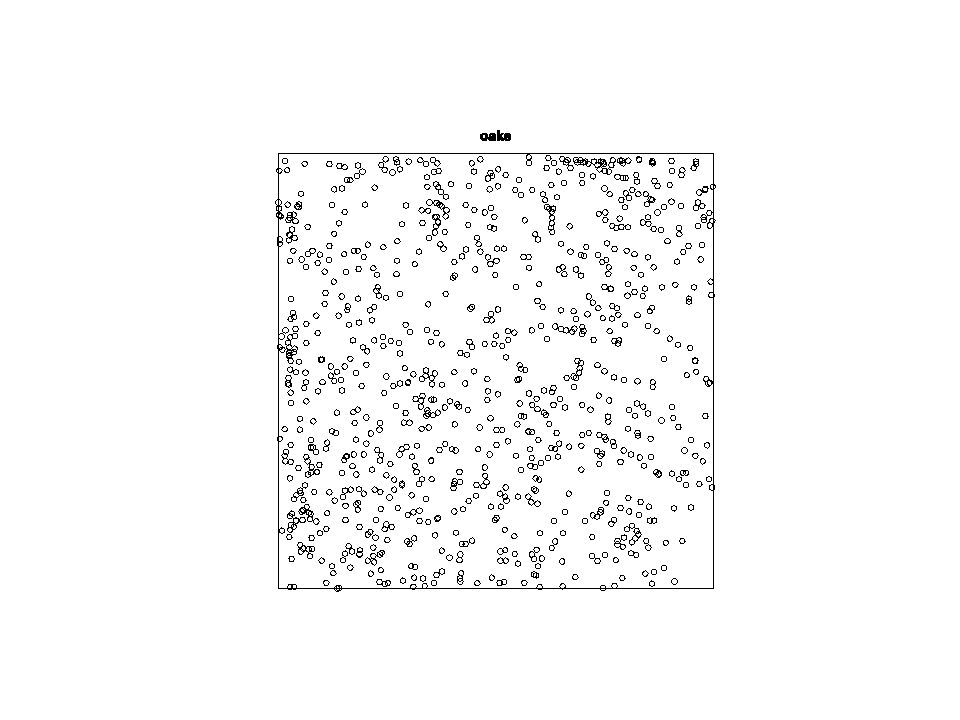
case study- Lansing wood oak trees
Data are the position of 959 oak trees in Lansing wood, Michigan-plot 1

20
summary statistics four common summary functions.
G function is the distribution function of the distance from an event to its nearest neighbour F function is the distribution function of a given point in A to its nearest event K function

22
hypothesis testing Monte carlo method to produce an envelope for the G function under CSR

24
software in R libraries spatstat and splancs

25
The problem of geostatistics
Given observations at n sites Z(u1),…, Z(un) How best to draw a map? What is our estimate of Z(u0) where u0 is location of an unobserved site?
,…, Z(un) How best to draw a map What is our estimate of Z(u0) where u0 is location of an unobserved site")
26
Spatial trend By definition, a trend is a systematic change in the mean value of the attribute over the area of interest. It is generally recognized that trend is a regional property. Although the trend is usually assumed to be smooth, it may change abruptly in response to sudden changes in environmental forcing variables (e.g., changes in bedrock geology).
.")
27
Isotropy and stationarity
A spatial random process is said to be isotropic if its properties do not depend on direction. C(t) does not depend on direction Stationarity means there is no spatial trend, no spatial periodicity, and the spatial covariance is the same at all locations
 does not depend on direction. Stationarity means there is no spatial trend, no spatial periodicity, and the spatial covariance is the same at all locations.")
28
Isotropy and Stationarity
An isotropic process is one whose properties (in particular the variogram) do not vary with direction A stationary process is one whose properties do not vary with space See Richard’s definition of stationarity in time series.
 do not vary with direction. A stationary process is one whose properties do not vary with space. See Richard’s definition of stationarity in time series.")
29
The autocovariance function
The autocorrelation function

30
Steps in a geostatistical analysis
Exploration Estimating the variogram Spatial interpolation and prediction

31
The semi-variogram Variance and covariance as a function of distance separating the locations

32
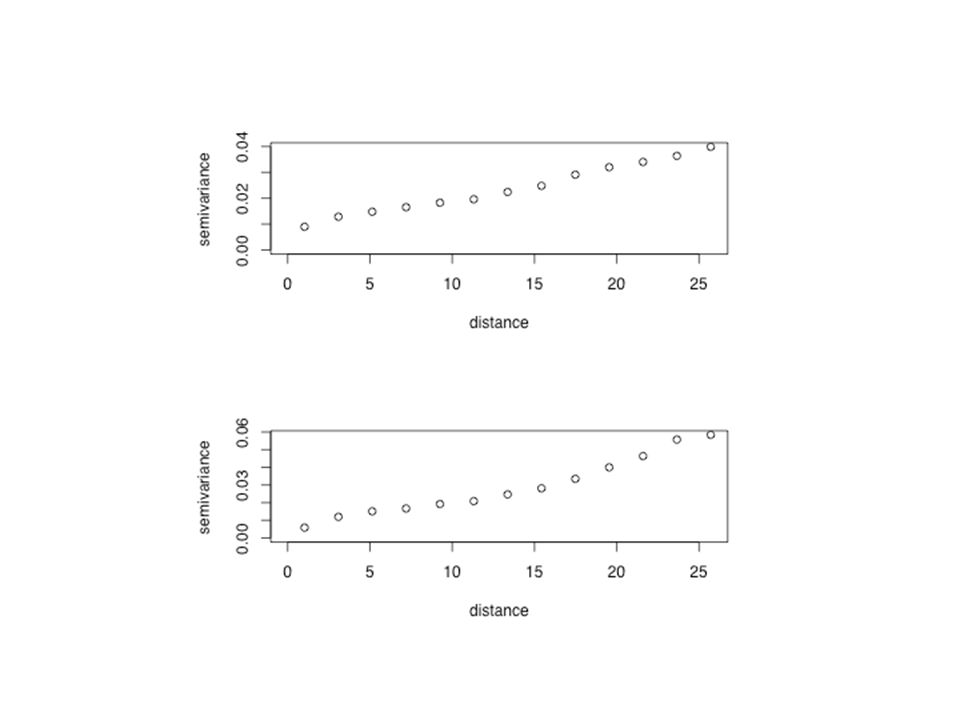
Estimating the variogram
for i,j=1,..n,

33
What does a generic variogram look like?

34
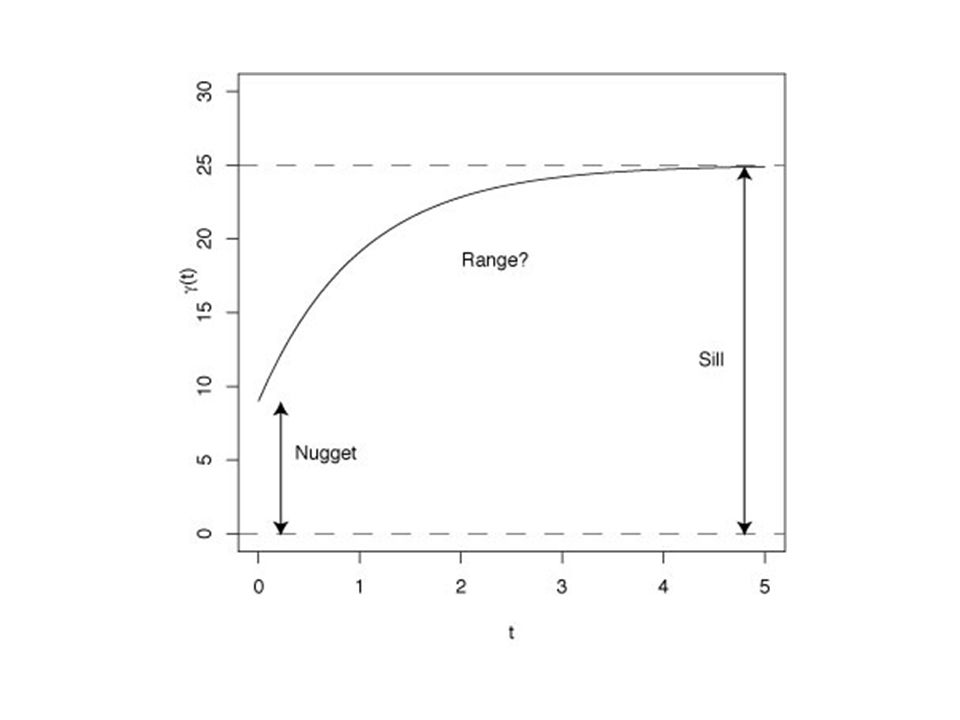
What are the nugget,range and sill?
The nugget is the limiting value of the semivariance as the distance approaches zero. The nugget captures spatial variability at very small spatial scales (those less than the separation between observations) and also measurement error. The sill is the horizontal asymptote of the variogram, if it exists, and represents the overall variance of the random process. The range is the lag value at which the semi-variance value reaches the sill.
 and also measurement error. The sill is the horizontal asymptote of the variogram, if it exists, and represents the overall variance of the random process. The range is the lag value at which the semi-variance value reaches the sill.")
37
Fit a variogram model Rather than look at the empirical variogram we can fit a model. Common examples are a spherical and an exponential variogram

38
Variogram models The nugget for random data The spherical

41
Spatial interpolation and prediction
Regression modelling (surface fitting) using generalised least squares Inverse distance weighted interpolation kriging
 using generalised least squares. Inverse distance weighted interpolation. kriging.")
42
Interpolation at unsampled location u0
The main difference between the different methods is the estimation of the weights

43
137Cs deposition maps in SW Scotland prepared by different European teams (ECCOMAGS, 2002)
")
44
Lochs in area Y

45
Geostatistical model The sample data,zi , are considered as realizations of a spatial random process,Z(u), with the sample points,ui , located in a two-dimensional spatial domain. That is,ui is a set of vectors. The process Z(u) is often assumed to be Gaussian.
, with the sample points,ui , located in a two-dimensional spatial domain. That is,ui is a set of vectors. The process Z(u) is often assumed to be Gaussian.")
46
Geostatistical model where represents the non-stochastic spatial component of the random process or trend; Sr is the stochastic part of the process. The variance of Z(u) is defined by the variance of the stochastic part of the process namely .2 .
 is defined by the variance of the stochastic part of the process namely .2 .")
47
Kriging 1 Ordinary kriging
First, the trend is estimated and subtracted from the observations. After the trend is estimated, the observed values can be de-trended by subtracting the estimated trend. Then, the variogram value and the distance between the locations are calculated for each pair of de-trended observations A model for the variogram is then fit and used to generate the weights for the weighted average process

48
Kriging 2 Other methods of kriging
There are a number of other kriging methods, such as block kriging, indicator kriging and co-kriging Some interesting issues concern the uncertainty, we can use the kriging procedure to produce and uncertainty map and recent work has been to develop approaches to incorporate the uncertainty in the variogram model.

49
Other uses of the variogram
The variogram provides information about the spatial correlation between locations. If goal is to produce a map, need to detect small-scale fluctuations in the quantity of interest. Prediction of the values at individual locations is most precise when those locations are highly correlated with observed locations. This can be achieved by ensuring that no place on the map is too far from an observed location One design to achieve this is a systematic sample with a grid spacing less than the range of the variogram.

50
Other uses of the variogram
If the sampling goal is to estimate the average over the entire study area, the opposite strategy is more appropriate. Correlated observations provide redundant statistical information, so it would be appropriate to spread out points so that no distance between a pair of points is smaller than the variogram range.

51
Kriging in R There are routines to do kriging in the R libraries:-
geoR fields gstat sgeostat spatstat spatdat

52
spatio-temporal statistical modelling
spatio-temporal statistical modelling a real challenge because of the complexity usually very large data sets, one ‘dimension’ may be richer than the other lots of stations, limited measurement in time few stations, monitored very frequently in time trying to combine the techniques found in time series and spatial analysis

53
spatio-temporal statistical modelling
one major difficulty concerns correlation through time correlation over space is correlation through space constant over time?, is the correlation through time constant over space? if yes, then we have a ‘separable’ and stationary process if not, then we need to build a space-time correlation structure (hard work)
")
54
spatio-temporal statistical modelling
the statistical modelling framework is that of a stochastic spatio-temporal process Z(s,t) (s represents space, t represents time) and write as Z(s) if Z(s) has a constant mean function and the covariance function depends only on the separation vector (s1-s2), then Z is a 2nd order stationary spatio-temporal process
 (s represents space, t represents time) and write as Z(s) if Z(s) has a constant mean function and the covariance function depends only on the separation vector (s1-s2), then Z is a 2nd order stationary spatio-temporal process.")
55
spatio-temporal statistical modelling
the covariance function of Z(s) written as cov[Z(s1), Z(s2)]= CS(s1,s2)CT(t1,t2) CS_ is the spatial covariance, CT is the temporal covariance separable simplification which means that we can use the tools we have met previously
 written as. cov[Z(s1), Z(s2)]= CS(s1,s2)CT(t1,t2) CS_ is the spatial covariance, CT is the temporal covariance. separable. simplification which means that we can use the tools we have met previously.")
56
Spatial Analysis Across Time
At each time point a plane across space was fitted and Gaussian Variograms of the residuals were computed. The average of the variogram parameters’ estimates were used to obtain the spatial covariance matrix .

57
non-separable processes
Much harder problem, still the basis of much statistical research.

Similar presentations