Download presentation
Presentation is loading. Please wait.

1
5 – Autoregressive Integrated Moving Average (ARIMA) Models
Box & Jenkins Methodology

2
Box-Jenkins Methodology
ARIMA Box-Jenkins Methodology

3
Example 1/4 The series show an upward trend. The first several autocorrelations are persistently large and trailed off to zero rather slowly a trend exists and this time series is nonstationary (it does not vary about a fixed level) Idea: to difference the data to see if we could eliminate the trend and create a stationary series.
 Idea: to difference the data to see if we could eliminate the trend and create a stationary series.")
4
Example 2/4 First order differences. A plot of the differenced data appears to vary about a fixed level. Comparing the autocorrelations with their error limits, the only significant autocorrelation is at lag 1. Similarly, only the lag 1 partial autocorrelation is significant. The PACF appears to cut off after lag 1, indicating AR(1) behavior. The ACF appears to cut off after lag 1, indicating MA(1) behavior we will try: ARIMA(1,1,0) and ARIMA(0,1,1) A constant term in each model will be included to allow for the fact that the series of differences appears to vary about a level greater than zero.
 behavior. The ACF appears to cut off after lag 1, indicating MA(1) behavior we will try: ARIMA(1,1,0) and ARIMA(0,1,1) A constant term in each model will be included to allow for the fact that the series of differences appears to vary about a level greater than zero.")
5
Example 3/4 ARIMA(1,1,0) ARIMA(0,1,1) The LBQ statistics are not significant as indicated by the large p-values for either model.
 ARIMA(0,1,1) The LBQ statistics are not significant as indicated by the large p-values for either model.")
6
Example 4/4 Finally, there is no significant residual autocorrelation for the ARIMA(1,1,0) model. The results for the ARIMA(0,1,1) are similar. Therefore, either model is adequate and provide nearly the same one-step-ahead forecasts.

7
Examples Makridakis Minitab Montgomery ARIMA 7.1 ARIMA PIGS ARIMA DJ
ARIMA Electricity ARIMA Computers ARIMA Sales Industry ARIMA Pollution Minitab Employ (Food) Montgomery EXEMPLO PAG 267 EXEMPLO PAG 271 EXEMPLO PAG 278 EXEMPLO PAG 283
 Montgomery. EXEMPLO PAG 267. EXEMPLO PAG 271. EXEMPLO PAG 278. EXEMPLO PAG 283.")
8
ARIMA Basic Model

9
Basic Models ARIMA (0, 0, 0) ― WHITE NOISE
ARIMA (0, 1, 0) ― RANDOM WALK ARIMA (1, 0, 0) ― AUTOREGRESSIVE MODEL (order 1) ARIMA (0, 0, 1) ― MOVING AVERAGE MODEL (order 1) ARIMA (1, 0, 1) ― SIMPLE MIXED MODEL
 ― RANDOM WALK. ARIMA (1, 0, 0) ― AUTOREGRESSIVE MODEL (order 1) ARIMA (0, 0, 1) ― MOVING AVERAGE MODEL. (order 1) ARIMA (1, 0, 1) ― SIMPLE MIXED MODEL.")
10
AR MA Example Models

11
Autocorrelation - ACF Lag ACF T LBQ 1 0,0441176 0,15 0,03
1 0, ,15 0,03 2 -0, ,32 0,17 Diferenças são devido a pequenas modificações nas fórmulas de Regressão e Time Series

12
Partial Correlation Suppose X, Y and Z are random variables. We define the notion of partial correlation between X and Y adjusting for Z. First consider simple linear regression of X on Z Also the linear regression of Y on Z

13
Partial Correlation Now consider the errors
Then the partial correlation between X and Y, adjusting for Z, is

14
Partial Autocorrelation - PACF
(1) (2) (3) (4) (5) (6) (7) (8) Corr(X*, Y*) Correlations: X*; Y* Pearson correlation of X* and Y* =0,770 P-Value = 0,000 Partial Autocorrelation Function: X Lag PACF T 1 0, ,98 2 -0, ,17 3 0, ,64 Diferenças são devido a pequenas modificações nas fórmulas de Regressão e Time Series
 (2) (3) (4) (5) (6) (7) (8) Corr(X*, Y*) Correlations: X*; Y* Pearson correlation of X* and Y* =0,770. P-Value = 0,000. Partial Autocorrelation Function: X. Lag PACF T. 1 0, , , , , ,64. Diferenças são devido a pequenas modificações nas fórmulas de Regressão e Time Series.")
15
Theorectical Behavior for AR(1)
ACF 0 PACF = 0 for lag > 1

16
Theorectical Behavior for AR(2)
ACF 0 PACF = 0 for lag > 2

17
Theorectical Behavior for MA (1)
PACF 0 ACF = 0 for lag > 1

18
Theorectical Behavior for MA(2)
PACF 0 PACF = 0 for lag > 2

19
Theorectical Behavior
Note that: ARMA(p,0) = AR(p) ARMA(0,q) = MA(q) ACF PACF AR(p) Die out Cut off after the order p of the process MA(q) Cut off after the order q of the process ARMA(p,q) In this context… “Die out” means “tend to zero gradually” “Cut off” means “disappear” or “is zero” In practice, the values of p and q each rarely exceed 2.
 = AR(p) ARMA(0,q) = MA(q) ACF. PACF. AR(p) Die out. Cut off after the order p of the process. MA(q) Cut off after the order q of the process. ARMA(p,q) In this context… Die out means tend to zero gradually Cut off means disappear or is zero In practice, the values of p and q each rarely exceed 2.")
20
Review of Main Characteristics of ACF and PACF

21
Example 5.1 Weekly total number of loan applications
The weekly data tend to have short runs and that the data seem to be indeed autocorrelated. Next, we visually inspect the stationarity. Although there might be a slight drop in the mean for the second year (weeks ), in general it seems to be safe to assume stationarity. EXEMPLO PAG 267.MPJ
, in general it seems to be safe to assume stationarity. EXEMPLO PAG 267.MPJ.")
22
Example 5.1 1. It cuts off after lag 2 (or maybe even 3), suggesting a MA(2) (or MA(3)) model. 2. It has an (or a mixture ot) exponential decay(s) pattern suggesting an AR(p) model.
 exponential decay(s) pattern suggesting an AR(p) model.")
23
Example 5.1 It cuts off after lag 2. Hence we use the second interpretation of the sample ACF plot and assume that the appropriate model to fit is the AR(2) model.
 model.")
24
Example 5.1 The modified Box-Pierce test suggests that there is no
autocorrelation left in the residuals.

25
Example 5.1

26
Example 5.1

27
Example 5.1

28
The process shows signs of nonstationarity with changing mean
Example 5.2 Dow Jones Index Exemplo: Página 271 The process shows signs of nonstationarity with changing mean and possibly variance.

29
Example 5.2 The slowly decreasing sample ACF and sample PACF with significant value at lag 1, which is close to 1 confirm that indeed the process can be deemed nonstationary.

30
Example 5.2 One might argue that the significant sample PACF value at lag I suggests that the AR( I) model might also fit the data well. We will consider this interpretation first and fit an AR( I) model to the Dow Jones Index data.
 model to the Dow Jones Index data.")
31
Example 5.2 The modified Box-Pierce test suggests that there is no autocorrelation left in the residuals. This is also confirmed by the sample ACF and PACF plots of the residuals

32
Example 5.2

33
Example 5.2 The only concern in the residual plots in is in the changing variance observed in the time series plot of the residuals.

34
Example 5.2

35
Example 5.2

36
Example 5.2

37
Example 5.2

38
Example 5.3 Prediction with AR(2) Exemplo pag 278
 Exemplo pag 278")
39
Example 5.3

40
Example 5.3

41
Example 5.5 U.S. Clothing Sales Data Exemplo: Página 283
The data obviously exhibit some seasonality and upward linear trend. c

42
Example 5.5 The sample ACF and PACF indicate a monthly seasonality,
s = 12, as ACF values at lags 12, 24, 36 are significant and slowly decreasing

43
Example 5.5 The sample ACF and PACF indicate a monthly seasonality,
s = 12, as ACF values at lags 12, 24, 36 are significant and slowly decreasing

44
Example 5.5 There is a significant PACF value at lag 12 that is close to 1. Moreover, the slowly decreasing ACF in general also indicates a nonstationarity that can be remedied by taking the first difference. Hence we would now consider

45
Example 5.5

46
Example 5.5 There is a significant PACF value at lag 12 that is close to 1. Moreover, the slowly decreasing ACF in general also indicates a nonstationarity that can be remedied by taking the first difference. Hence we would now consider

47
Example 5.5 Figure shows that first difference together with seasonal differencing helps in terms of stationarity and eliminating the seasonality

48
Example 5.5

49
Example 5.5 The sample ACF with a significant value at lag 1 and the sample PACF with exponentially decaying values at the first 8 lags suggest that a nonseasonal MA( I) model should be used.
 model should be used.")
50
Example 5.5 The interpretation of the remaining seasonality is a bit more difficult. For that we should focus on the sample ACF and PACF values at lags , 36, and so on. The sample ACF at lag 12 seems to be significant and the sample PACF at lags 12, 24, 36 (albeit not significant) seems to be alternating in sign. That suggests that a seasonal MA(1) model can be used as well. Hence an ARIMA (0, 1, 1) x (0, 1, 1) 12 model is used to model the data, yt
 seems to be alternating in sign. That suggests that a seasonal MA(1) model can be used as well. Hence an ARIMA (0, 1, 1) x (0, 1, 1) 12 model is used to model the data, yt.")
51
Example 5.5 Both MA( 1) and seasonal MA( 1) coefficient estimates are significant. As we can see from the sample ACF and PACF plots, while there are still some small significant values, as indicated by the modified Box-Pierce statistic, most of the autocorrelation is now modeled out.

52
Example 5.5 As we can see from the sample ACF and PACF plots, while there are still some small significant values, as indicated by the modified Box-Pierce statistic, most of the autocorrelation is now modeled out.

53
Example 5.5

54
Example 5.5

55
Introduction Exponential smoothing. The general assumption for these models was that any time series data can be represented as the sum of two distinct components: deterministic and stochastic (random). The former (deterministic) is modeled as a function of time whereas for the latter (stochastic) we assumed that some random noise that is added on the deterministic signal generates the stochastic behavior of the time series. One very important assumption is that the random noise is generated through independent shocks to the process. In practice, however, this assumption is often violated. That is, usually successive observations show serial dependence. Under these circumstances, forecasting methods based on exponential smoothing may be inefficient and sometimes inappropriate because they do not take advantage of the serial dependence in the observations in the most effective way. To formally incorporate this dependent structure, we will explore a general class of models called autoregressive integrated moving average models or ARIMA models (also known as Box-Jenkins models).
. The former (deterministic) is modeled as a function of time whereas for the latter (stochastic) we assumed that some random noise that is added on the deterministic signal generates the stochastic behavior of the time series. One very important assumption is that the random noise is generated through independent shocks to the process. In practice, however, this assumption is often violated. That is, usually successive observations show serial dependence. Under these circumstances, forecasting methods based on exponential smoothing may be inefficient and sometimes inappropriate because they do not take advantage of the serial dependence in the observations in the most effective way. To formally incorporate this dependent structure, we will explore a general class of models called autoregressive integrated moving average models or ARIMA models (also known as Box-Jenkins models).")
56
Linear Models for Stationary Time Series
A linear filter is defined as Um conceito de Processamento de Sinais is said to be

57
Stationarity

58
Some Examples

59
Stationary Time Series
Many time series do not exhibit a stationary behavior The stationarity is in fact a rarity in real life However it provides a foundation to build upon since (as we will see later on) if the time series in not stationary, its first difference (yt-yt-1) will often be
 if the time series in not stationary, its first difference (yt-yt-1) will often be.")
60
Linear Filter

61
If Input is White Noise

62
Using the Backshift Operator

63
Wold’s Decomposition Theorem
Any nondeterministic weakly stationary time series can be written as an infinite sum of weighted random shocks (disturbances) where
 where.")
64
How can we come up with “infinitely” many terms?
How useful is this? Well, not so much!!! How can we come up with “infinitely” many terms?

65
Maybe we should consider some special cases:

66
Finite Order Moving Average Processes (Ma(q))
)")
67
Some Properties Expected Value Variance

68
Some Properties Autocovariance Function Autocorrelation Function (ACF)
")
69
Autocorrelation Function of MA(q)
ACF of Ma(q) ”cuts off” after lag q This is very useful in the identification of an MA(q) process
 cuts off after lag q. This is very useful in the identification of an MA(q) process.")
70
Example Employ.mtw

71
Diferences

72
Autocorrelation The graphs for the autocorrelation function (ACF) of the ARIMA residuals include lines representing two standard errors to either side of zero. Values that extend beyond two standard errors are statistically significant at approximately a = 0.05, and show evidence that the model does not explain thel autocorrelation in the data. Because you did not specify the lag length, autocorrelation uses the default length of n / 4 for a series with less than or equal to 240 observations. Minitab generates an autocorrelation function (ACF) with approximate a = 0.05 critical bands for the hypothesis that the correlations are equal to zero.
 of the ARIMA residuals include lines representing two standard errors to either side of zero. Values that extend beyond two standard errors are statistically significant at approximately a = 0.05, and show evidence that the model does not explain thel autocorrelation in the data. Because you did not specify the lag length, autocorrelation uses the default length of n / 4 for a series with less than or equal to 240 observations. Minitab generates an autocorrelation function (ACF) with approximate a = 0.05 critical bands for the hypothesis that the correlations are equal to zero.")
73
Autocorrelation The ACF for these data shows large positive, significant spikes at lags 1 and 2 with subsequent positive autocorrelations that do not die off quickly. This pattern is typical of an autoregressive process.

74
Ljung-Box q statistic Use to test whether a series of observations over time are random and independent. If observations are not independent, one observation may be correlated with another observation k time units later, a relationship called autocorrelation. Autocorrelation can impair the accuracy of a time-based predictive model, such as time series plot, and lead to misinterpretation of the data. For example, an electronics company tracks monthly sales of batteries for five years. They want to use the data to develop a time series model to help forecast future sales. However, monthly sales may be affected by seasonal trends. For example, every year a rise in sales occurs when people buy batteries for Christmas toys. Thus a monthly sales observation in one year could be correlated with a monthly sales observations 12 months later (a lag of 12). Before choosing their time series model, they can evaluate autocorrelation for the monthly differences in sales. The Ljung-Box Q (LBQ) statistic tests the null hypothesis that autocorrelations up to lag k equal zero (i.e., the data values are random and independent up to a certain number of lags--in this case 12). If the LBQ is greater than a specified critical value, autocorrelations for one or more lags may be significantly different from zero, suggesting the values are not random and independent over time. LBQ is also used to evaluate assumptions after fitting a time series model, such as ARIMA, to ensure that the residuals are independent. The Ljung-Box is a Portmanteau test and is a modified version of the Box-Pierce chi-square statistic.
. Before choosing their time series model, they can evaluate autocorrelation for the monthly differences in sales. The Ljung-Box Q (LBQ) statistic tests the null hypothesis that autocorrelations up to lag k equal zero (i.e., the data values are random and independent up to a certain number of lags--in this case 12). If the LBQ is greater than a specified critical value, autocorrelations for one or more lags may be significantly different from zero, suggesting the values are not random and independent over time. LBQ is also used to evaluate assumptions after fitting a time series model, such as ARIMA, to ensure that the residuals are independent. The Ljung-Box is a Portmanteau test and is a modified version of the Box-Pierce chi-square statistic.")
75
Ho: Autocorrelation (lag<6) = 0
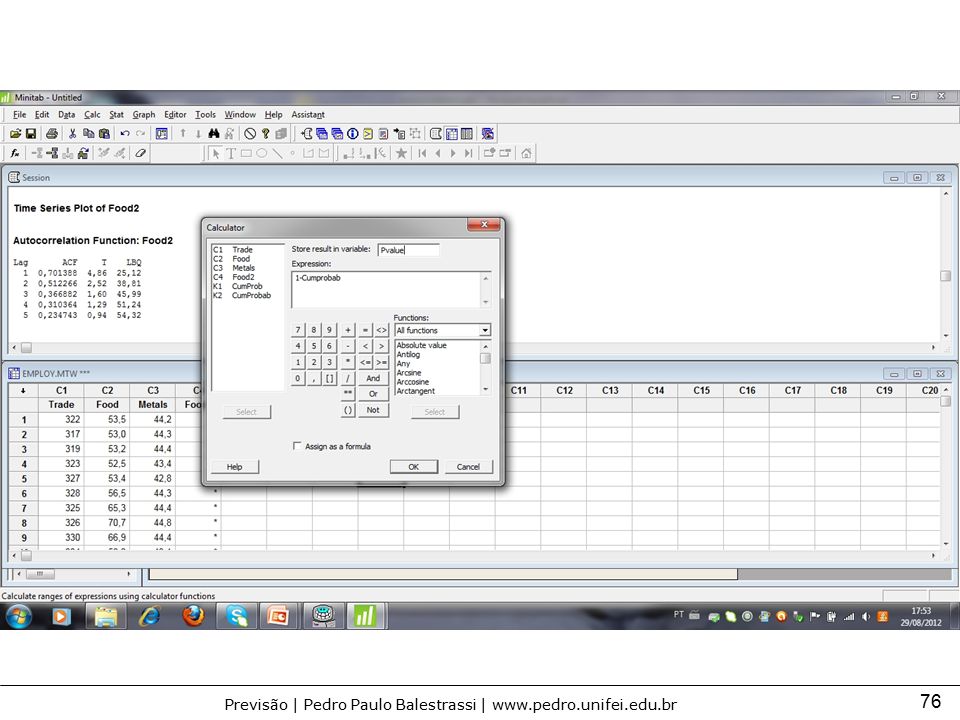
You can use the Ljung-Box Q (LBQ) statistic to test the null hypothesis that the autocorrelations for all lags up to lag k equal zero. Let's test that all autocorrelations up to a lag of 6 are zero. The LBQ statistic is Ho: Autocorrelation (lag<6) = 0 Variable CumProb is created
 statistic to test the null hypothesis that the autocorrelations for all lags up to lag k equal zero. Let s test that all autocorrelations up to a lag of 6 are zero. The LBQ statistic is Ho: Autocorrelation (lag<6) = 0. Variable CumProb is created.")
77
In this example, the p-value is 0
In this example, the p-value is , which means the p-value is less than The very small p-value implies that one or more of the autocorrelations up to lag 6 can be judged as significantly different from zero at any reasonable a level.

78
Partial autocorrelation computes and plots the partial autocorrelations of a time series. Partial autocorrelations, like autocorrelations, are correlations between sets of ordered data pairs of a time series. As with partial correlations in the regression case, partial autocorrelations measure the strength of relationship with other terms being accounted for. The partial autocorrelation at a lag of k is the correlation between residuals at time t from an autoregressive model and observations at lag k with terms for all intervening lags present in the autoregressive model. The plot of partial autocorrelations is called the partial autocorrelation function or PACF. View the PACF to guide your choice of terms to include in an ARIMA model.

79
You obtain a partial autocorrelation function (PACF) of the food industry employment data, after taking a difference of lag 12, in order to help determine a likely ARIMA model.
 of the food industry employment data, after taking a difference of lag 12, in order to help determine a likely ARIMA model.")
80
Minitab generates a partial autocorrelation function with critical bands at approximately a = 0.05 for the hypothesis that the correlations are equal to zero. In the food data example, there is a single large spike of 0.7 at lag 1, which is typical of an autoregressive process of order one. There is also a significant spike at lag 9, but you have no evidence of a nonrandom process occurring there.

82
Sample ACF Will not be equal to zero after lag q for an MA(q) But it will be small For the same size of N, this can be tested using the limits:

83
First-Order Moving Average Process MA(1)
for which autocovariance and autocorrelation functions are given as

84
Some Examples Note, the behavior of sample ACF

85
Second-Order Moving Average Process MA(2)
for which autocovariance and autocorrelation functions are given as

86
An Example

87
Finite Order Autoregressive Processes (AR(p))
MA(q) processes take into account disturbances up to q lags in the past What if all past disturbances have some lingering effects? Back to square one? We may be able to come up with some special cases though
 processes take into account disturbances up to q lags in the past. What if all past disturbances have some lingering effects Back to square one We may be able to come up with some special cases though.")
88
A very special case What if we let

89
Decomposition and

90
Combining the two equations
This is an AR(1) model
 model.")
91
First-Order Autoregressive Process (AR(1))
)")
92
Properties Expected Value Autocovariance Function Autocorrelation Function

93
Some Examples

94
Second-Order Autoregressive Process (AR(2))
)")
95
Conditions for Stationarity

96
AR(2) is stationary if …
 is stationary if …")
97
AR(2) is stationary if …
 is stationary if …")
98
AR(2) Hence {yj} satisfy the 2nd order linear difference equation. So the yi can be expressed as the solution to this equation in terms of the 2 roots m1 and m2 of the associated polynomial If the roots m1 and m2 satisfy

99
AR(2) is stationary if the roots m1 and m2 of are both less than one in absolute value
 is stationary if the roots m1 and m2 of are both less than one in absolute value")
100
ACF of a stationary AR(2)
")
101
ACF of a stationary AR(2)
Yule-Walker Equations

102
ACF of a stationary AR(2)
Hence ACF satisfies the 2nd order linear difference equation. So the r(k) can be expressed as the solution to this equation in terms of the 2 roots m1 and m2 of the associated polynomial
 can be expressed as the solution to this equation in terms of the 2 roots m1 and m2 of the associated polynomial.")
103
ACF of a stationary AR(2)
")
104
Some Examples

105
AR(p)
")
106
are less than one in absolute value.
AR(p) is Stationary If the roots of are less than one in absolute value.
 is Stationary. If the roots of. are less than one in absolute value.")
107
Infinite MA representation

108
Expected Value of an AR(p)
")
109
Autocovariance Function of an AR(p)
")
110
Autocorrelation Function of an AR(p)
")
111
ACF of AR(p) In general ACF of AR(p) can be a mixture of exponential decay and damped sinusoidal behavior depending on the solution to the corresponding Yule-Walker equations.

112
ACF of AR(p)
")
113
ACF of MA(q) “cuts off” after q
ACF for AR(p) and MA(q) ACF of MA(q) “cuts off” after q ACF of AR(p) can be a mixture of exponential decay and damped sinusoidal
 and MA(q) ACF of MA(q) cuts off after q. ACF of AR(p) can be a mixture of exponential decay and damped sinusoidal.")
114
So how are we going to determine p in the AR(p) model?
 model")
115
Partial Correlation Suppose X, Y and Z are random variables. We define the notion of partial correlation between X and Y adjusting for Z. First consider simple linear regression of X on Z Also the linear regression of Y on Z

116
Partial Correlation Now consider the errors
Then the partial correlation between X and Y, adjusting for Z, is

117
Partial Autocorrelation Function (PACF)
")
118
Partial Autocorrelation Function (PACF)
")
119
Partial Autocorrelation Function (PACF)
")
120
Partial Autocorrelation Function (PACF)
")
121
Sample Partial Autocorrelation Function

122
Some Examples

123
For an AR(p) process, PACF cuts off after lag p.
For an MA(q) process, PACF has an exponential decay and/or a damped sinusoid form
 process, PACF has an exponential decay and/or a damped sinusoid form.")
124
Invertibility of a MA Process

125
Invertibility of a MA Process

126
Invertibility of a MA Process
We have

127
The ACF and PACF do have very distinct and indicative properties for MA and AR models. Therefore in model identification it is strongly recommended to use both the sample ACF and PACF simultaneously

128
Mixed Autoregressive-Moving Average (ARMA(p,q)) Process
) Process")
129
Stationarity of ARMA(p,q)
")
130
Invertibility of ARMA(p,q)
")
131
ACF and PACF of an ARMA(p,q)
Both ACF and PACF of an ARMA(p,q) can be a mixture of exponential decay and damped sinusoids depending on the roots of the AR operator.
 can be a mixture of exponential decay and damped sinusoids depending on the roots of the AR operator.")
132
ARMA Models For ARMA models, except for possible special cases, neither ACF nor PACF has distinctive features that would allow “easy identification” For this reason, there have been many additional sample functions considered to help with identification problem: Extended sample ACF (ESACF) Generalized sample PACF (GPACF) Inverse ACF Use of “canonical correlations”
 Generalized sample PACF (GPACF) Inverse ACF. Use of canonical correlations")
133
Some Examples

134
Review of Main Characteristics of ACF and PACF

135
Review of Main Characteristics of Sample ACF and PACF

136
Some Examples

137
Some Examples

138
Some Examples

139
Some Examples

140
Some Examples

141
ARIMA Models Process {yt} is ARIMA(p,d,q), if the dth order differences, wt=(1-B)dyt, form a stationary ARMA(p,q) process: Thus {yt} satisfies

142
Some Examples

143
Some Examples

144
Model Building Given T observations from a process, want to obtain a model that adequately represents the main features of the time series data. Model can be used for purposes of forecasting, control, …

145
STAGE 1: Model Specification or Identification
3-Stage Procedure STAGE 1: Model Specification or Identification Consider issue of nonstationarity vs. stationarity of series. Use procedures such as differencing to obtain a stationary series; say wt=(1-B)dyt Examine sample ACF and PACF of wt and use features of these functions to identify an appropriate ARMA model. The specification is “tentative”
dyt. Examine sample ACF and PACF of wt and use features of these functions to identify an appropriate ARMA model. The specification is tentative")
146
Review of Main Characteristics of ACF and PACF

147
Review of Main Characteristics of Sample ACF and PACF

148
ARMA Models For ARMA models, except for possible special cases, neither ACF nor PACF has distinctive features that would allow “easy identification” For this reason, there have been many additional sample functions considered to help with identification problem: Extended sample ACF (ESACF) Generalized sample PACF (GPACF) Inverse ACF Use of “canonical correlations”
 Generalized sample PACF (GPACF) Inverse ACF. Use of canonical correlations")
149
STAGE 2: Estimation of Parameters in Tentatively Specified Model
3-Stage Procedure STAGE 2: Estimation of Parameters in Tentatively Specified Model Method of moments Least Squares Maximum Likelihood

150
STAGE 3: Model Checking 3-Stage Procedure
Based on examining features of residuals

151
3-Stage Procedure STAGE 3: If the specified model is appropriate order p, q; then we expect the residuals behave similar to the “true” white noise et.

152
Example 5.1 Weekly total number of loan applications

153
Example 5.1

154
Example 5.1

155
Example 5.1

156
Example 5.1

157
Example 5.1

158
Example 5.1

159
Example 5.2 Dow Jones Index

160
Example 5.2

161
Example 5.2

162
Example 5.2

163
Example 5.2

164
Example 5.2

165
Example 5.2

166
Example 5.2

167
Example 5.2

168
Example 5.2

169
Forecasting ARIMA Processes

170
Forecasting ARIMA Processes

171
The “best” forecast

172
Forecast Error

173
Prediction Intervals

174
Two Issues

175
Illustration Using ARIMA(1,1,1)
ARIMA(1,1,1) process is given as Two commonly used approaches
 process is given as. Two commonly used approaches.")
176
Approach 1

177
Approach 2

178
Example 5.3

179
Seasonal Processes

180
Seasonal Processes

181
Seasonal Processes

182
Seasonal Processes

183
Example 5.4

184
Example 5.5 U.S. Clothing Sales Data

185
Example 5.5

186
Example 5.5

187
Example 5.5

188
Example 5.5

189
Example 5.5

190
Example 5.5

191
Example 5.5

192
Example 5.5

193
Example 5.5

194
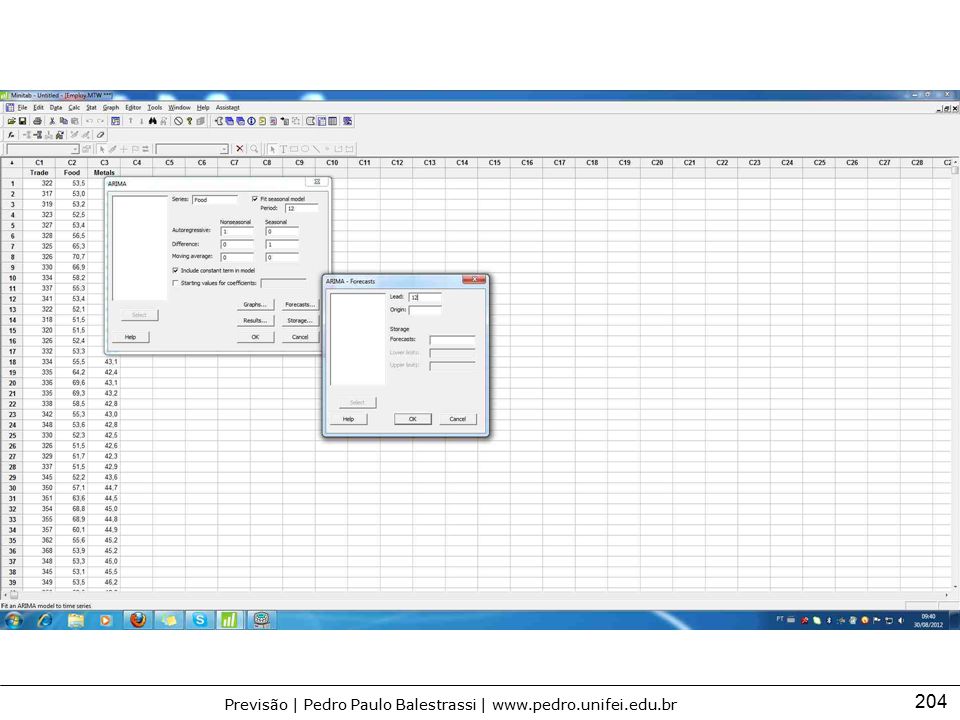
Use ARIMA to model time series behavior and to generate forecasts
Use ARIMA to model time series behavior and to generate forecasts. ARIMA fits a Box-Jenkins ARIMA model to a time series. ARIMA stands for Autoregressive Integrated Moving Average with each term representing steps taken in the model construction until only random noise remains. ARIMA modeling differs from the other time series methods in the fact that ARIMA modeling uses correlational techniques. ARIMA can be used to model patterns that may not be visible in plotted data.

195
The ACF and PACF of the food employment data suggest an autoregressive model of order 1, or AR(1), after taking a difference of order 12. You fit that model here, examine diagnostic plots, and examine the goodness of fit. To take a seasonal difference of order 12, you specify the seasonal period to be 12, and the order of the difference to be 1.

196
1 Model is specified by the usual notation (pdq) x (PDQ) S:
(pdq) is for a nonseasonal model; (PDQ) for a seasonal, and S is the seasonality. 2 At least one of the p, P, q, or Q parameters must be non-zero, and none may exceed five. 3 The maximum number of parameters you can estimate is ten. 4 At least three data points must remain after differencing. That is, S * D + d + 2 must be less than the number of points, where S is the length of a season. 5 The maximum "back order" for the model is 100. In practice, this condition is always satisfied if S * D + d + p + P + q + Q is at most 100. 6 The ARIMA model normally includes a constant term only if there is no differencing (that is, d = D = 0). 7 Missing observations are only allowed at the beginning or the end of a series, not in the middle. 8 The seasonal component of this model is multiplicative, and thus is appropriate when the amount of cyclical variation is proportional to the mean.
 is for a nonseasonal model; (PDQ) for a seasonal, and S is the seasonality. 2 At least one of the p, P, q, or Q parameters must be non-zero, and none may exceed five. 3 The maximum number of parameters you can estimate is ten. 4 At least three data points must remain after differencing. That is, S * D + d + 2 must be less than the number of points, where S is the length of a season. 5 The maximum back order for the model is 100. In practice, this condition is always satisfied if S * D + d + p + P + q + Q is at most The ARIMA model normally includes a constant term only if there is no differencing (that is, d = D = 0). 7 Missing observations are only allowed at the beginning or the end of a series, not in the middle. 8 The seasonal component of this model is multiplicative, and thus is appropriate when the amount of cyclical variation is proportional to the mean.")
197
The ARIMA model converged after nine iterations
The ARIMA model converged after nine iterations. The AR(1) parameter had a t-value of As a rule of thumb, you can consider values over two as indicating that the associated parameter can be judged as significantly different from zero. The MSE (1.1095) can be used to compare fits of different ARIMA models. The Ljung-Box statistics give nonsignificant p-values , indicating that the residuals appeared to uncorrelated. The ACF and PACF of the residuals corroborate this. You assume that the spikes in the ACF and PACF at lag 9 are the result of random events The coefficients are estimated using an iterative algorithm that calculates least squares estimates. At each iteration, the back forecasts are computed and SSE is calculated. Back forecasts are calculated using the specified model and the current iteration's parameter estimates
 parameter had a t-value of As a rule of thumb, you can consider values over two as indicating that the associated parameter can be judged as significantly different from zero. The MSE (1.1095) can be used to compare fits of different ARIMA models. The Ljung-Box statistics give nonsignificant p-values , indicating that the residuals appeared to uncorrelated. The ACF and PACF of the residuals corroborate this. You assume that the spikes in the ACF and PACF at lag 9 are the result of random events. The coefficients are estimated using an iterative algorithm that calculates least squares estimates. At each iteration, the back forecasts are computed and SSE is calculated. Back forecasts are calculated using the specified model and the current iteration s parameter estimates.")
198
Box and Jenkins [2] present an interactive approach for fitting ARIMA models to time series. This iterative approach involves identifying the model, estimating the parameters, checking model adequacy, and forecasting, if desired. The model identification step generally requires judgment from the analyst. 1 First, decide if the data are stationary. That is, do the data possess constant mean and variance . · Examine a time series plot to see if a transformation is required to give constant variance. · Examine the ACF to see if large autocorrelations do not die out, indicating that differencing may be required to give a constant mean. A seasonal pattern that repeats every kth time interval suggests taking the kth difference to remove a portion of the pattern. Most series should not require more than two difference operations or orders. Be careful not to overdifference. If spikes in the ACF die out rapidly, there is no need for further differencing. A sign of an overdifferenced series is the first autocorrelation close to -0.5 and small values elsewhere.
![Box and Jenkins [2] present an interactive approach for fitting ARIMA models to time series. This iterative approach involves identifying the model, estimating the parameters, checking model adequacy, and forecasting, if desired. The model identification step generally requires judgment from the analyst.](http://slideplayer.com/slide/3293686/11/images/198/Box+and+Jenkins+%5B2%5D+present+an+interactive+approach+for+fitting+ARIMA+models+to+time+series.+This+iterative+approach+involves+identifying+the+model%2C+estimating+the+parameters%2C+checking+model+adequacy%2C+and+forecasting%2C+if+desired.+The+model+identification+step+generally+requires+judgment+from+the+analyst..jpg "1 First, decide if the data are stationary. That is, do the data possess constant mean and variance . · Examine a time series plot to see if a transformation is required to give constant variance. · Examine the ACF to see if large autocorrelations do not die out, indicating that differencing may be required to give a constant mean. A seasonal pattern that repeats every kth time interval suggests taking the kth difference to remove a portion of the pattern. Most series should not require more than two difference operations or orders. Be careful not to overdifference. If spikes in the ACF die out rapidly, there is no need for further differencing. A sign of an overdifferenced series is the first autocorrelation close to -0.5 and small values elsewhere.")
199
2 Next, examine the ACF and PACF of your stationary data in order to identify what autoregressive or moving average models terms are suggested. · An ACF with large spikes at initial lags that decay to zero or a PACF with a large spike at the first and possibly at the second lag indicates an autoregressive process. · An ACF with a large spike at the first and possibly at the second lag and a PACF with large spikes at initial lags that decay to zero indicates a moving average process. · The ACF and the PACF both exhibiting large spikes that gradually die out indicates that both autoregressive and moving averages processes are present. For most data, no more than two autoregressive parameters or two moving average parameters are required in ARIMA models.

200
3 Once you have identified one or more likely models, you are ready to use the ARIMA procedure.
· Fit the likely models and examine the significance of parameters and select one model that gives the best fit. · Check that the ACF and PACF of residuals indicate a random process, signified when there are no large spikes. You can easily obtain an ACF and a PACF of residual using ARIMA's Graphs subdialog box. If large spikes remain, consider changing the model. · You may perform several iterations in finding the best model. When you are satisfied with the fit, go ahead and make forecasts. The ARIMA algorithm will perform up to 25 iterations to fit a given model. If the solution does not converge, store the estimated parameters and use them as starting values for a second fit. You can store the estimated parameters and use them as starting values for a subsequent fit as often as necessary.

201
The graphs for the ACF and PACF of the ARIMA residuals include lines representing two standard errors to either side of zero. Values that extend beyond two standard errors are statistically significant at approximately a = 0.05, and show evidence that the model has not explained all autocorrelation in the data.

203
The AR(1) model appears to fit well so you use it to forecast employment.
 model appears to fit well so you use it to forecast employment.")
206
The ARIMA algorithm is based on the fitting routine in the TSERIES package written by Professor William Q. Meeker, Jr., of Iowa State University. W.Q. Meeker, Jr. (1977). "TSERIES-A User-oriented Computer Program for Identifying, Fitting and Forecasting ARIMA Time Series Models," ASA 1977 Proceedings of the Statistical Computing Section. W.Q. Meeker, Jr. (1977). TSERIES User's Manual, Statistical Laboratory, Iowa State University.
. TSERIES-A User-oriented Computer Program for Identifying, Fitting and Forecasting ARIMA Time Series Models, ASA 1977 Proceedings of the Statistical Computing Section. W.Q. Meeker, Jr. (1977). TSERIES User s Manual, Statistical Laboratory, Iowa State University.")
Similar presentations
















>")




 Grants Chapter 6.>")
