Download presentation
Presentation is loading. Please wait.

1
White Table Tops Text Books & Work Books

2
Mechanical Engineering Linking in Technical Objects Guiding Controls

3
Pages Work book p. 217 Text book p. 427

4
Linking in technical objects

5
Mechanical Engineering is… A branch of engineering that focuses on the design, production, analysis, working and improvement of technical objects with moving parts

6
A link allows… Two or more parts of a technical object to be held together

7
In mechanics, a component is… a part or fluid that performs a mechanical function

8
Linking is… The mechanical function performed by any component that connects different parts of a technical object

9
The degrees of freedom are… The set of independent movements that are possible for a given part in a technical object

10
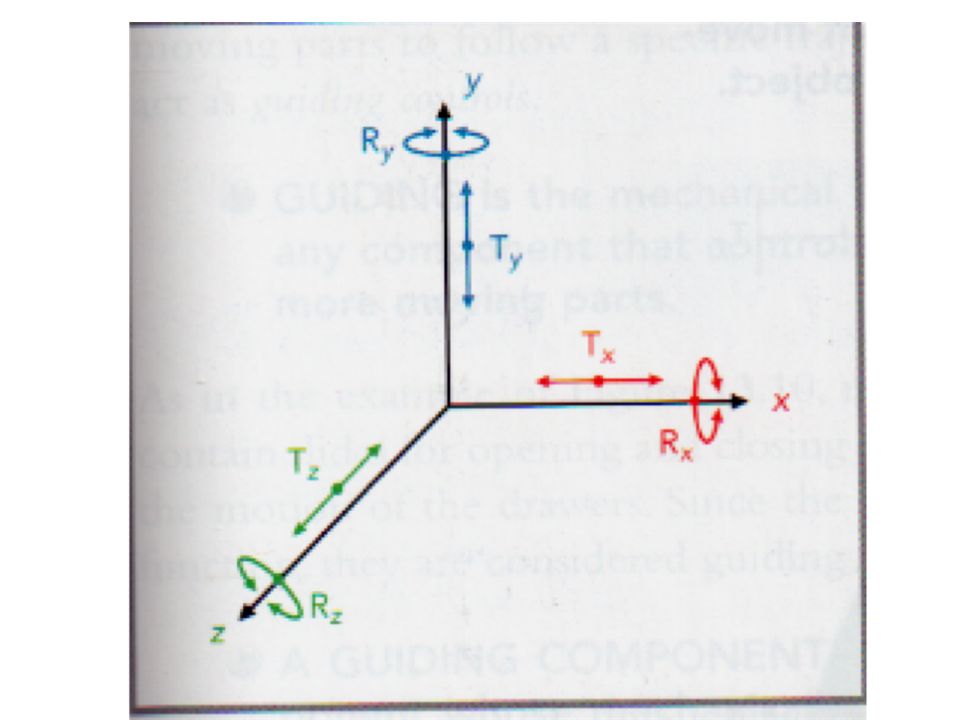
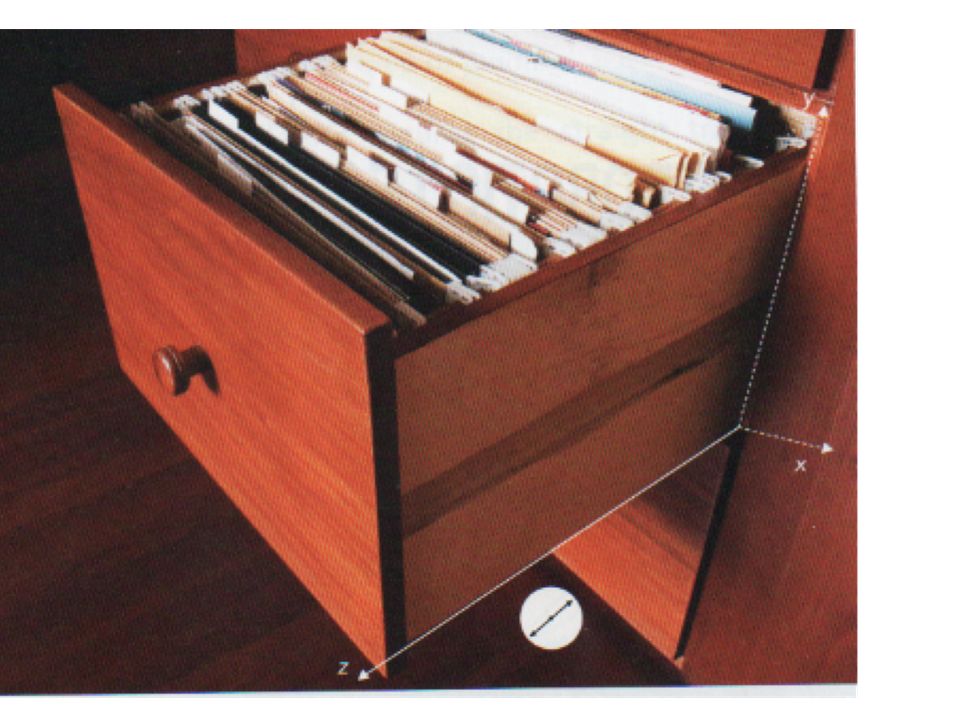
Possibilities of Independent Motion

13
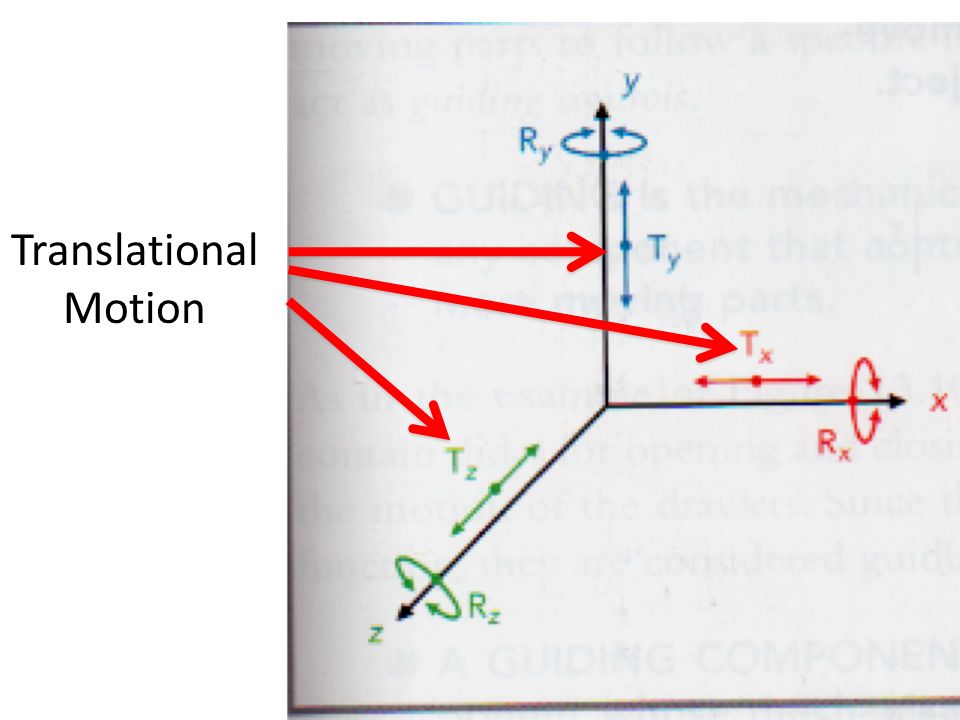
Translational Motion

15
Translational motion From left to right From top to bottom From back to front Tx Ty Tz

16
Left to Right (Tx) X- Axis
 X- Axis")
17
Top to Bottom (Ty) Y- Axis
 Y- Axis")
18
Back to Front (Tz) Z-Axis
 Z-Axis")
19
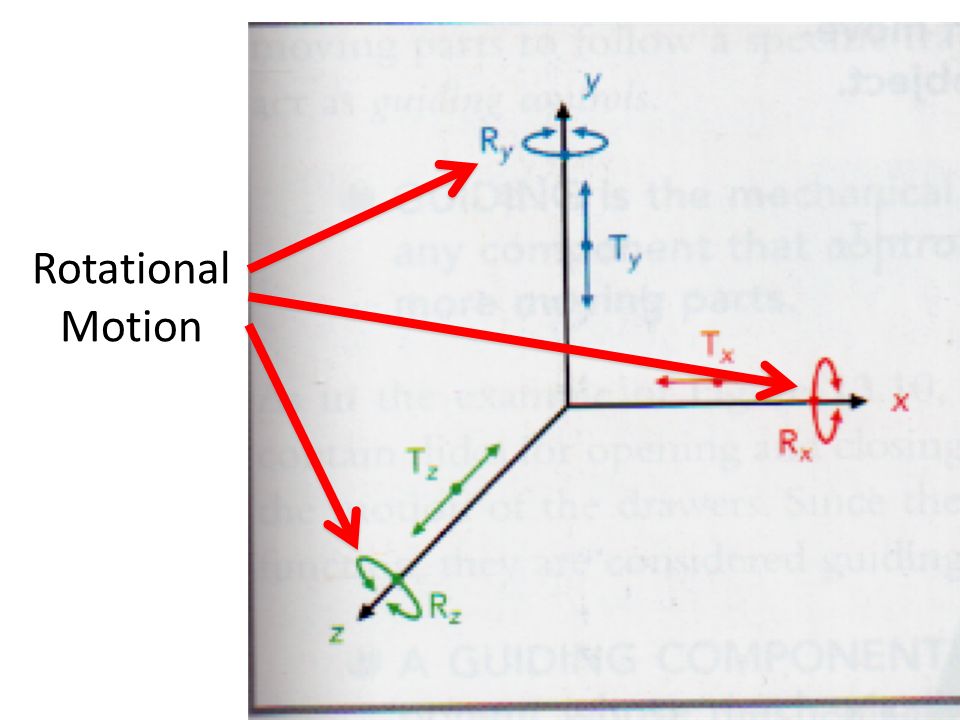
Rotational Motion

21
About the x axis About the y axis About the z axis Rx Ry Rz

22
X-Axis (Rx) X-Axis
 X-Axis")
23
Y-Axis (Ry) Y-Axis
 Y-Axis")
24
Z-Axis (Rz) Z-Axis
 Z-Axis")
25
Characteristics of links p. 218

26
1 st Characteristic pair Direct Indirect

27
Direct A direct link exists when two parts can hold together without requiring a linking component

28
Cell Phone > Case

29
Indirect An indirect link exists when the parts require a linking component to hold them together

30
Arm > Frame ?

31
2 nd Characteristic pair Rigid Flexible

32
Rigid A rigid link exists when the surfaces of the linked parts or the linking component are rigid

33
Base > monitor

34
Flexible A flexible link exists when the surface of the linked parts or the linking component can be deformed

35
Pages > spine

36
3 rd Characteristic pair Removable Non-removable

37
Removable A removable link exists when linked parts can be separated without damaging them

38
Laces > eyelets

39
Non-removable A non-removable link exists when separating the linked parts damages them or the linking component

40
Sole > upper ?

41
4 th Characteristic Pair Complete Partial

42
Complete link There is a complete link when there is no movement between linked parts

43
Top > bottom

44
Partial There is a partial link when at least one part is capable of motion with respect to the other

45
Cap > pen

46
Guiding Controls Work book p. 221 Text book p. 431

47
Guiding is… The mechanical function performed by any component that controls the motion of one or more moving parts

48
A Guiding Component or Control is.. A component whose mechanical function is to guide the motion of moving parts

49
Adhesion is… The phenomenon by which two surfaces tend to remain in contact with each other without slipping

50
In Mechanics, Friction is… A force that resists the slipping of one moving part over another

51
Lubrication is… The mechanical function performed by any component that reduces friction between two parts

52
Main Types of Guiding

53
Translational Guiding Ensures the straight translational motion of a moving part

54
Translational Guide

55
Rotational Guiding Ensures the rotational motion of a moving part

56
Rotational Guide

57
Helical Guiding… Ensures the translational motion of a moving part while it rotates about the same axis

58
Helical Guide

59
Homework Pp. 217-224

60
Activity # 1 Table = group 1 student with white board + pen Group I.D. characteristics of link Write answers on white board Winners = prize

61
The types of « Links » between Parts The “link” between the frame and the adjusting screw is: ? Non-removable or removable, Complete or partial, direct or indirect, rigid or flexible,.

62
The types of « Links » between Parts The “link” between the frame and the adjusting screw is: ? Non-removable or removable, Complete or partial, direct or indirect, rigid or flexible,

63
The types of « Links » between Parts The “link” between the frame and the adjusting screw is: ? Non-removable or removable, Complete or partial, direct or indirect, rigid or flexible,

64
The types of « Links » between Parts The “link” between the frame and the adjusting screw is: ? Non-removable or removable, Complete or partial, direct or indirect, rigid or flexible,

65
The types of « Links » between Parts The “link” between the frame and the adjusting screw is: ? Non-removable or removable, Complete or partial, direct or indirect, rigid or flexible,

66
Types if GUIDES

67
The types of « Guides » between Parts The Guide between the frame and the adjusting screw is: ? Translational Rotational Helical

68
The types of « Links » between Parts The “link” between the bottom handle and the top handle is: ? permanent or removable, fixed or moveable, direct or indirect, rigid or flexible,.

69
The types of « Links » between Parts The “link” between the bottom handle and the top handle is: ? PERMANENT or removable, fixed or moveable, direct or indirect, rigid or flexible,.

70
The types of « Links » between Parts The “link” between the bottom handle and the top handle is: ? PERMANENT or removable, fixed or MOVEABLE, direct or indirect, rigid or flexible,.

71
The types of « Links » between Parts The “link” between the bottom handle and the top handle is: ? PERMANENT or removable, fixed or MOVEABLE, direct or INDIRECT, rigid or flexible,.

72
The types of « Links » between Parts The “link” between the bottom handle and the top handle is: ? PERMANENT or removable, fixed or MOVEABLE, direct or INDIRECT, RIGID or flexible,.

73
Wind Turbine Project

74
Horizontal Axis

Similar presentations









What are the scientific principles which explain the operation of the.>")



 Diagrams>")




 of the Day Answer the following questions on a piece of paper and put your name at the top. You have 8 minutes to complete the questions of.>")
