Download presentation
Presentation is loading. Please wait.

1
Disturbed Behaviour in Co-operating Autonomous Robots Robert Ghanea-Hercock & David Barnes Salford University, England

2
Introduction Autonomous Robots experience behavioural problems, particularly in groups. The problem is to balance the conflicts imposed by a dynamic environment with the need to co- operate with other robots. Hybrid architectures offer a preliminary framework to build upon.

3
Problem Domain & Goals Handling and transporting hazardous materials, i.e. nuclear plant decommissioning. (Work was industrially sponsored by UK Robotics Ltd). To translate user’s requests into plans and sets of behaviours to control two co-operating fully autonomous mobile robots.
. To translate user’s requests into plans and sets of behaviours to control two co-operating fully autonomous mobile robots..")
4
Methodology A hybrid control system was developed, with a reflective Planning agent linked remotely to the two mobile robots. Each robot has a reactive behaviour based control system, with a fuzzy rule base controlling the interactions between behaviours.

5
Fred & Ginger

6
Adaptivity vs Control? There appears to be a trade-off between the degree of external control and level of adaptivity a system can express. Survivability in hostile environments is the critical factor.

7
Behaviour Synthesis Architecture B.S.A developed by Barnes at Salford ‘89 Based on a vector synthesis mechanism, to combine multiple behaviours in parallel. Each behaviour is a pair of functions: a stimulus- response, and a utility-response function. The utility-response can be dynamically modified by a meta-control layer, i.e. the fuzzy rule base.

8
Fuzzy Behaviours Fuzzy logic can bridge the gap between reactive behaviours and reflective plan sequences. Firing of each fuzzy rule provides contextual knowledge of the robots interaction with the environment.

9
Hierarchical behaviour control Behaviour pattern n Behaviour pattern 1 Behaviour pattern 0 Adaptive Fuzzy Rule Base Vector Summation Obstacle sensor IR sensor Beacon sensor

10
Dynamic Fuzzy Action Surface Hypothesis: for a goal seeking agent, a state of dynamic imbalance in its control cycle improves its ability to navigate unstructured environments. The frequency of rule firing therefore has an associated cost function, and a proportional degree of suppression.

11
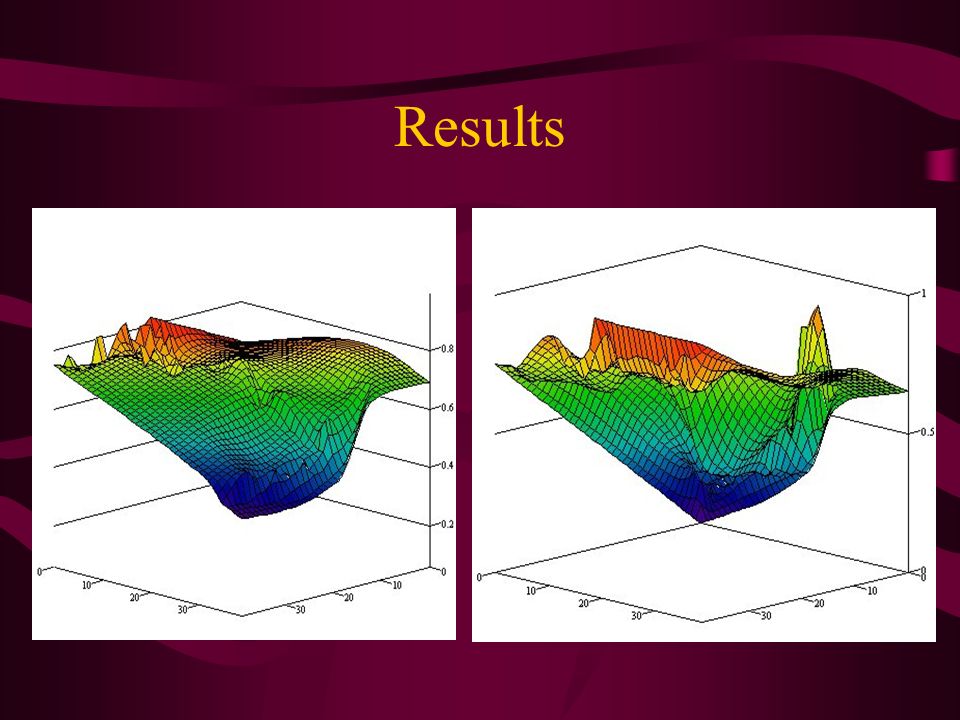
Results The behaviour patterns and fuzzy rules were designed in an off-line simulation, and applied to two B12 mobile robots. The adaptive fuzzy rule base significantly improved the robots ability to escape from local minima within the laboratory environment.

12
Results

14
Conclusions Adaptive behaviour requires an understanding of the dynamics present in the overall robot- environment-control system. Dynamic instability can be a positive feature in autonomous agent control strategies. The frequency of sensory stimuli contains useful context information about the environment, and can be used to modify current behaviour.

Similar presentations
 Research Group School of Computer Science and IT University.>")
 Dr. Q. Meng (Supervisor)>")

 University of Bridgeport Department of Computer Science and Engineering Robotics, Intelligent Sensing.>")















