Download presentation
Presentation is loading. Please wait.

1
Recognising Panoramas M. Brown and D. Lowe, University of British Columbia

2
Introduction Are you getting the whole picture? –Compact Camera FOV = 50 x 35°

3
Introduction Are you getting the whole picture? –Compact Camera FOV = 50 x 35° –Human FOV = 200 x 135°

4
Introduction Are you getting the whole picture? –Compact Camera FOV = 50 x 35° –Human FOV = 200 x 135° –Panoramic Mosaic = 360 x 180°

5
Why Recognising Panoramas?

6
1D Rotations () –Ordering matching images
 –Ordering matching images")
7
Why Recognising Panoramas? 1D Rotations () –Ordering matching images
 –Ordering matching images")
8
Why Recognising Panoramas? 1D Rotations () –Ordering matching images
 –Ordering matching images")
9
Why Recognising Panoramas? 2D Rotations (, ) –Ordering matching images 1D Rotations () –Ordering matching images
 –Ordering matching images 1D Rotations () –Ordering matching images.")
10
Why Recognising Panoramas? 1D Rotations () –Ordering matching images 2D Rotations (, ) –Ordering matching images
 –Ordering matching images 2D Rotations (, ) –Ordering matching images.")
11
Why Recognising Panoramas? 1D Rotations () –Ordering matching images 2D Rotations (, ) –Ordering matching images
 –Ordering matching images 2D Rotations (, ) –Ordering matching images.")
12
Why Recognising Panoramas?

13
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

14
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

15
Overview Feature Matching –SIFT Features –Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

16
Overview Feature Matching –SIFT Features –Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

17
Invariant Features Schmid & Mohr 1997, Lowe 1999, Baumberg 2000, Tuytelaars & Van Gool 2000, Mikolajczyk & Schmid 2001, Brown & Lowe 2002, Matas et. al. 2002, Schaffalitzky & Zisserman 2002

18
SIFT Features Invariant Features –Establish invariant frame Maxima/minima of scale-space DOG x, y, s Maximum of distribution of local gradients –Form descriptor vector Histogram of smoothed local gradients 128 dimensions SIFT features are… –Geometrically invariant to similarity transforms, some robustness to affine change –Photometrically invariant to affine changes in intensity

19
Overview Feature Matching –SIFT Features –Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

20
Nearest Neighbour Matching Find k-NN for each feature –k number of overlapping images (we use k = 4) Use k-d tree –k-d tree recursively bi-partitions data at mean in the dimension of maximum variance –Approximate nearest neighbours found in O(nlogn)
 Use k-d tree –k-d tree recursively bi-partitions data at mean in the dimension of maximum variance –Approximate nearest neighbours found in O(nlogn)")
21
Overview Feature Matching –SIFT Features –Nearest Neighbour Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

22
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

23
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

24
Overview Feature Matching Image Matching –RANSAC for Homography –Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions

25
Overview Feature Matching Image Matching –RANSAC for Homography –Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions

26
RANSAC for Homography

29
Overview Feature Matching Image Matching –RANSAC for Homography –Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions

30
Probabilistic model for verification

31
Compare probability that this set of RANSAC inliers/outliers was generated by a correct/false image match –n i = #inliers, n f = #features –p 1 = p(inlier | match), p 0 = p(inlier | ~match) –p min = acceptance probability Choosing values for p 1, p 0 and p min
, p 0 = p(inlier | ~match) –p min = acceptance probability Choosing values for p 1, p 0 and p min")
32
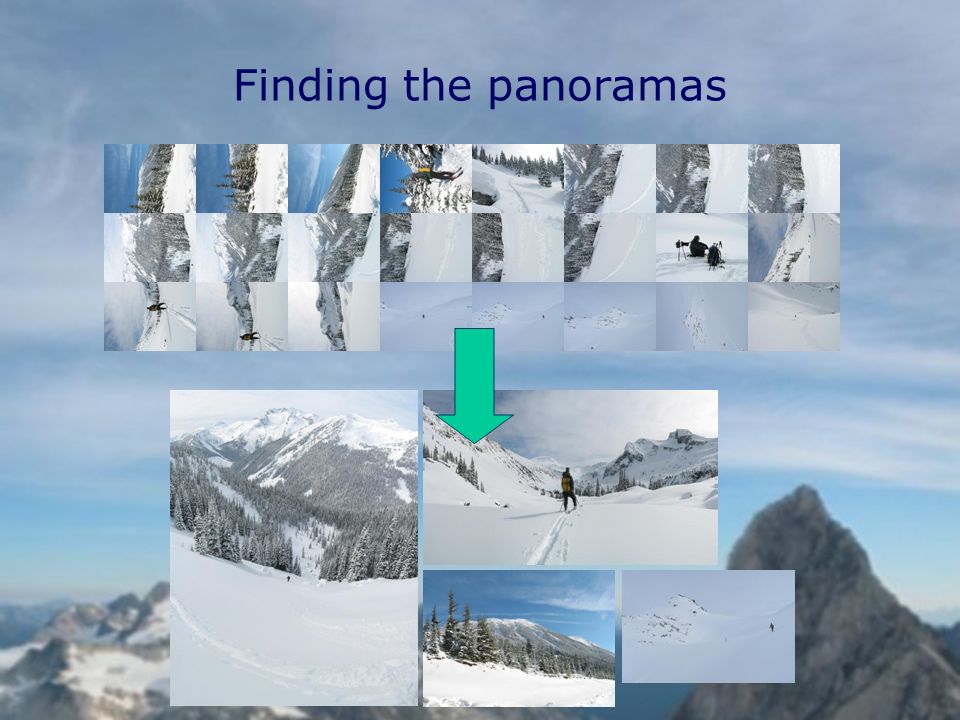
Finding the panoramas

36
Overview Feature Matching Image Matching –RANSAC for Homography –Probabilistic model for verification Bundle Adjustment Multi-band Blending Results Conclusions

37
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

38
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

39
Overview Feature Matching Image Matching Bundle Adjustment –Error function Multi-band Blending Results Conclusions

40
Overview Feature Matching Image Matching Bundle Adjustment –Error function Multi-band Blending Results Conclusions

41
Error function Sum of squared projection errors –n = #images –I(i) = set of image matches to image i –F(i, j) = set of feature matches between images i,j –r ij k = residual of k th feature match between images i,j Robust error function
 = set of image matches to image i –F(i, j) = set of feature matches between images i,j –r ij k = residual of k th feature match between images i,j Robust error function")
42
Parameterise each camera by rotation and focal length This gives pairwise homographies Homography for Rotation

43
Bundle Adjustment New images initialised with rotation, focal length of best matching image

44
Bundle Adjustment New images initialised with rotation, focal length of best matching image

45
Overview Feature Matching Image Matching Bundle Adjustment –Error function Multi-band Blending Results Conclusions

46
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

47
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

48
Multi-band Blending Burt & Adelson 1983 –Blend frequency bands over range

49
Low frequency ( > 2 pixels) High frequency ( < 2 pixels) 2-band Blending
 High frequency ( < 2 pixels) 2-band Blending")
50
Linear Blending

51
2-band Blending

54
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

55
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

56
Results

58
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

59
Overview Feature Matching Image Matching Bundle Adjustment Multi-band Blending Results Conclusions

60
Fully automatic panoramas –A recognition problem… Invariant feature based method –SIFT features, RANSAC, Bundle Adjustment, Multi- band Blending –O(nlogn) Future Work –Advanced camera modelling radial distortion, camera motion, scene motion, vignetting, exposure, high dynamic range, flash … –Full 3D case – recognising 3D objects/scenes in unordered datasets
 Future Work –Advanced camera modelling radial distortion, camera motion, scene motion, vignetting, exposure, high dynamic range, flash … –Full 3D case – recognising 3D objects/scenes in unordered datasets")
61
Questions?

62
Analytical computation of derivatives

63
Levenberg-Marquardt Iteration step of form

Similar presentations













>")











 interest points, descriptors, Harris corners, correlation matching –Interest points.>")
