Download presentation
Presentation is loading. Please wait.

1
MicroMouse Chris TuasonPeter Kral Sam RokniTian-Hwa Yang

2
Abstract The micro mouse project is a robot that is programmed to solve a maze that consists of 16 x 16 unit squares with each unit square being 18 cm x 18 cm. The robotic mouse cannot be larger either in length or in width, than 25 centimeters, but there are no restrictions on the height. The mouse is made up of a micro- processor, sensors, stepper motor, chassis, and batteries. The Basic Stamp processor is programmed with PBasic language. The sensors detect at both short and long distances. A pair of short range sensors will help correct the direction of the mouse, while another pair of long range sensor will help the mouse turn at the right time. The Basic Stamp program will be written to help the mouse navigate through the maze. Also, the program will determine if the mouse should stop, go forward or backward, or turn left or right. This will be based on the data that are sent from the sensors to the processor.

3
Competition Sponsored by IEEE Worldwide competitions Regional Competitions CSUF located in region 6 UCLA-March 2003 16 x 16 block maze Self contained robot 18 cm 2 block size $500 limit

4
Parts Lists QuantityDescriptionPrice ($)TotalBought from: (part #) 1Basic stamp 249.00 Parallax: ( BS2-IC) 1Board of Education65.00 Parallax: ( 28150) 2Servo Motors12.0024.00Parallax: ( 900-00005) 3Sharp IR sensors-short range(GP2D120)10.5031.50 Hobby engineering: (1060) 2Sharp IR sensors – Long range GP2D1210.5021.00 Hobby engineering: (1061) 5JST 3-pin connectors2.0010.00 Hobby engineering: (1182)
TotalBought from: (part #) 1Basic stamp Parallax: ( BS2-IC) 1Board of Education65.00 Parallax: ( 28150) 2Servo Motors Parallax: ( ) 3Sharp IR sensors-short range(GP2D120) Hobby engineering: (1060) 2Sharp IR sensors – Long range GP2D Hobby engineering: (1061) 5JST 3-pin connectors Hobby engineering: (1182)")
5
Parts Lists 2Analog to Digital converter (ADC0831)8.0016.00Parallax: (ADC0831) 42.75 Girder.753.00 Hobby engineering: (1439) 42.7 Frame (2 tab)2.008.00 Hobby engineering: (1451) 41.15 Frame (1 tab)1.004.00 Hobby engineering: (1444) 21.5 X.9 U-Bar1.002.00 Hobby engineering: (1448) 25Nuts and BoltsFreeN/AAsk Jimmy Not including shipping costs and local taxes Total $233.50
 Parallax: (ADC0831) Girder Hobby engineering: (1439) 42.7 Frame (2 tab) Hobby engineering: (1451) Frame (1 tab) Hobby engineering: (1444) 21.5 X.9 U-Bar Hobby engineering: (1448) 25Nuts and BoltsFreeN/AAsk Jimmy Not including shipping costs and local taxes Total $233.50")
6
System Diagram Motor Stepper Electronic Micro Computer Sensor Electronics Sensors Right Left Front A/D Converter

7
Over Flow Algorithm Overflow algorithm Assign cells with values Represents a certain distance to the center of the maze

8
??

9
Over Flow Algorithm Flow chart inserted here

10
Backup Program Memory limitation to 32 bytes of variable space Optimization or/and room for improvement 2k of EEPROM

11
Proximity Forward errors begins when a mouse is either too close or too far from the wall ahead Offset errors, which happens often, is caused by being too far to the left or to the right as you pass through a cell Heading error is known as pointing at walls rather than down the middle of the cell

12
Forward ErrorOffset ErrorHeading Error

13
Proximity Flow Chart

14
Sensors GP2D120 Range 4-15 cm Initial use of potentiometer, then A2D interface

16
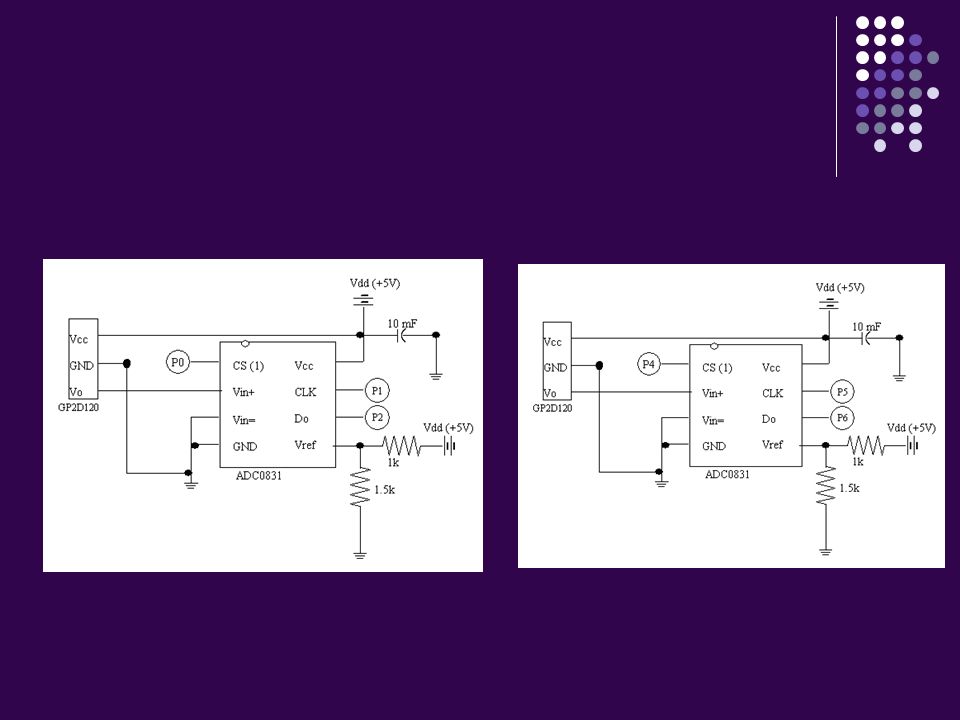
Analog to Digital Converter ADC0831 8 bit, 5 volt, with I/O Control Low Chip Select to initiate clock pulse Reads output from most significant to least significant High chip select to stop Done through PBasic program

18
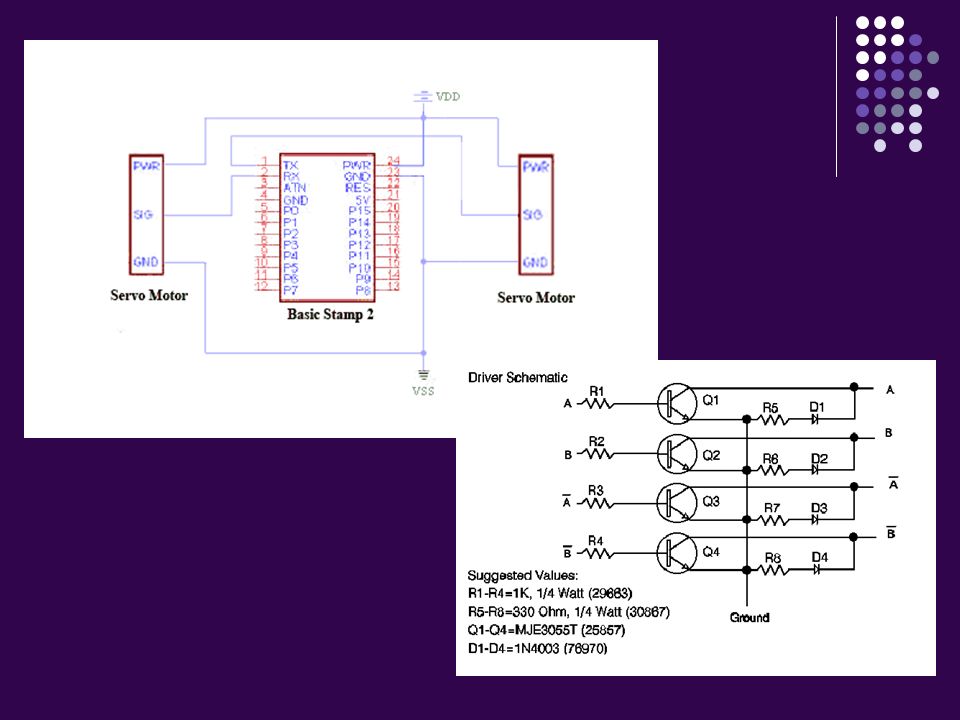
Stepper Motors Non-linear characteristics Internal drivers controlled through basic stamp 3 pin out: ground, high, pulse Example, 1.4 kHz is the command frequency for PBasic program input for stop command, i.e. 750

20
Integrated Schematic with A2D sensor and microcontroller

21
Problems and Solutions Analog sensors and reverse logic Adjustment of straight path and turns PBasic programming logic Inadequate programming language If statements Battery life Distance motor reaction change Characteristics change

22
Conclusion Team project ABET Requirements Interdisciplinary project ECS exposure Artificial Intelligence Valuable learning experiences

23
Thank you!

24
Questions?

Similar presentations



. Introduction Zensys a Danish-American company founded in 1999 invented the Z-wave technology. They are basically.>")








 - Clock speed of 20 MHz. - Holds 600 lines of code in EEPROM - executes an average of.>")

 Ryan Sato (Hardware) KiWoon Ahn (Recorder) Alan Do (Programmer)>")





