Download presentation
Presentation is loading. Please wait.

1
Introduction to Image Processing
Filtering in the Frequency Domain Grass Sky Tree ? Discrete Fourier Transform

2
Image Enhancement in the Frequency Domain
The frequency is the number of oscillations per second. The higher the frequency, the shorter the period. In imaging, it means how quickly/slowly the grey level intensity changes. Images represent variations of brightness or colour in space. If the variation is spatial and L, the period is a distance, then 1/L is termed the spatial frequency of the variation. A High Frequency Signal (1-D) A Low Frequency Signal (1-D)
 A Low Frequency Signal (1-D)")
3
Why Frequency Domain? The frequency domain describes the rate of signal change. We can associate frequencies in the Fourier Transform with patterns of intensity variations in the image. Thus different information about an image can be extracted and manipulated. Some tasks would be difficult or impossible to perform directly in the spatial domain, e.g., it is very difficult to do a good job of sharpening a blurred image caused by motion in the spatial domain. This task is generally solved by frequency domain filtering. Spatial domain filters are useful for lessening the effects of additive/random noise. However in the frequency domain we can uncover patterned noise (e.g. sinusoidal noise) and remove it using band reject/notch frequency domain filters. Applying the equivalent filters in the spatial domain involves convolution which requires a great amount of computation
 and remove it using band reject/notch frequency domain filters. Applying the equivalent filters in the spatial domain involves convolution which requires a great amount of computation.")
4
Fourier Theory Basic ideas:
A periodic function, however complex it might appear, can be represented as a weighted sum of sines/cosines functions of different frequencies. Although there may be little regularity apparent in an image, it can be decomposed into a set of sinusoidal components, each of which has a well defined frequency.

5
Fourier transform basis functions
Example 1 Fourier transform basis functions Approximating a square wave as the sum of sine waves

6
Example 2 time domain frequency domain
Another familiar example is sun glasses with UV filter which removes the ultra-violet - very high frequency - component from the sunshine.

7
Fourier Transform 1-D, Continuous Case: Fourier Transform:
Frequency Domain Signals Time, Spatial Domain Signals Inverse Transform 1-D, Continuous Case: Fourier Transform: “Euler’s formula” Inverse Fourier Transform:

8
Discrete Fourier Transform
1-D, Discrete Case: Fourier Transform: u = 0,…,M-1 Inverse Fourier Transform: x = 0,…,M-1 F(u) can be written as: Polar coordinate: where magnitude phase
 can be written as: Polar coordinate: where. magnitude. phase.")
9
Periodicity of 1-D DFT From DFT: F(u) = F(u+kM)
We display only in this range F(u) = F(u+kM) -M 2M M DFT repeats itself every M points (Period = M) is the number of complete cycles of the sinusoid that fits into the width M of the image. These form the basis functions of the frequency domain representation and the weights for each sine and cosine function are known as Fourier coefficients.
 = F(u+kM) -M. 2M. M. DFT repeats itself every M points (Period = M) is the number of complete cycles of the sinusoid that fits into the width M of the image. These form the basis functions of the frequency domain representation and the weights for each sine and cosine function are known as Fourier coefficients.")
10
Conventional Display for 1-D DFT
f(x) DFT M/2 M-1 M-1 Time Domain Signal High frequency area F(u) = F*(-u) Low frequency area The graph F(u) is not easy to understand !
 DFT. M/2. M-1. M-1. Time Domain Signal. High frequency. area. F(u) = F*(-u) Low frequency. area. The graph F(u) is not. easy to understand !")
11
Better Display for 1-D DFT
Shift center of the graph F(u) to 0 to get better display which is easier to understand. M/2 M-1 High frequency area Low frequency area -M/2 M/2-1
 to 0 to get better display which is easier to understand. M/2. M-1. High frequency area. Low frequency area. -M/2. M/2-1.")
12
2-D Discrete Fourier Transform
For an image of size MxN pixels 2-D DFT u = frequency in x direction, u = 0 ,…, M-1 v = frequency in y direction, v = 0 ,…, N-1 2-D IDFT x = 0 ,…, M-1 y = 0 ,…, N-1

13
2-D Discrete Fourier Transform
F(u,v) can be written as: or where magnitude phase For the purpose of viewing, we usually display only the magnitude part of F(u,v)
 can be written as: or. where. magnitude. phase. For the purpose of viewing, we usually display only the. magnitude part of F(u,v)")
14
Fourier Basis v

15
Fourier Examples Raw Image Fourier Amplitude Sinusoid,
higher frequency DC term + side lobes wide spacing Sinusoid, lower frequency DC term+ side lobes close spacing Sinusoid, tilted Titled spectrum

16
More Fourier Examples Fourier basis element Vector (u,v)
Magnitude gives frequency Direction gives orientation.

17
More Fourier Examples Here u and v are larger than in the previous slide.

18
More Fourier Examples And larger still...

19
Discrete Fourier Transform - Magnitude
Original image Fourier transform Logarithmic operator applied The image contains components of all frequencies, but their magnitude gets smaller for higher frequencies Low frequencies contain more image information than the higher ones Two dominating directions in the Fourier image, vertical and horizontal. These originate from the regular patterns in the background

20
Discrete Fourier Transform - Phase
The value of each point determines the phase of the corresponding frequency The phase information is crucial to reconstruct the correct image in the spatial domain Phase image Re-transform using only magnitude

21
Discrete Fourier Transform

22
Inverse Transform If we attempt to reconstruct the image with an inverse Fourier Transform after destroying either the phase information or the amplitude information, then the reconstruction will fail.

23
Phase Carries More Information
Raw Images: Magnitude and Phase: Reconstruct (inverse FFT) mixing the magnitude and phase images Phase “Wins”
 mixing the. magnitude and. phase images. Phase Wins")
24
Properties of 2-D DFT Periodicity Symmetry Translation
the 2-D DFT and its inverse are infinitely periodic in the u and v directions F(u,v) = F(u+k1M,v) = F(u,v+k2N) = F(u+k1M, v+k2N) Symmetry for real image f(x,y), DFT is conjugate symmetric, i.e. Translation f(x,y)ej2∏(u0x/M+v0y/N) F(u-u0, v-v0) f(x,y)(-1)x+y F(u-M/2, v-N/2)
 = F(u+k1M,v) = F(u,v+k2N) = F(u+k1M, v+k2N) Symmetry. for real image f(x,y), DFT is conjugate symmetric, i.e. Translation. f(x,y)ej2∏(u0x/M+v0y/N) F(u-u0, v-v0) f(x,y)(-1)x+y F(u-M/2, v-N/2)")
25
Periodicity of 2-D DFT 2-D DFT: -N For an image of size MxN pixels, its 2-D DFT repeats itself every M points in the x-direction and every N points in the y-direction. N We display only in this range 2N -M M 2M

26
Better Display for 2-D DFT
2-D Circular Shift High frequency area Low frequency area

27
2-D Circular Shift: How it Works
Original display of 2-D DFT M 2M -M N 2N -N Display of 2-D DFT After circular shift

28
The Spectrum of DFT Original Image Log Enhanced Fourier Transform

29
Spectrum Shift We shift the origin of the transform to the centre. Now the low frequency information is in the centre of the DFT.

30
convolution in the spatial/time domain
Convolution Theorem f(x,y) * h(x,y) F(u,v) H(u,v) multiplication in the frequency domain convolution in the spatial/time domain Filtering in the spatial/time domain with h(x, y) is equivalent to filtering in the frequency domain with H(u,v), where F and H are the DFT of f and h respectively Multiplication on the right hand side is component-wise, i.e. |F(u,v)| x |H(u,v)|
 * h(x,y) F(u,v) H(u,v) multiplication in the frequency domain. convolution in the spatial/time domain. Filtering in the spatial/time domain with h(x, y) is equivalent to filtering in the frequency domain with H(u,v), where F and H are the DFT of f and h respectively. Multiplication on the right hand side is component-wise, i.e. |F(u,v)| x |H(u,v)|")
31
Basic Filtering Steps From the property of Fourier Transform:
multiplication in the frequency domain is easier than convolution in the spatial domain.

32
Frequency Domain Filtering
Fourier Transform Inverse Fourier Transform Multiplication

33
Frequency Domain Filters
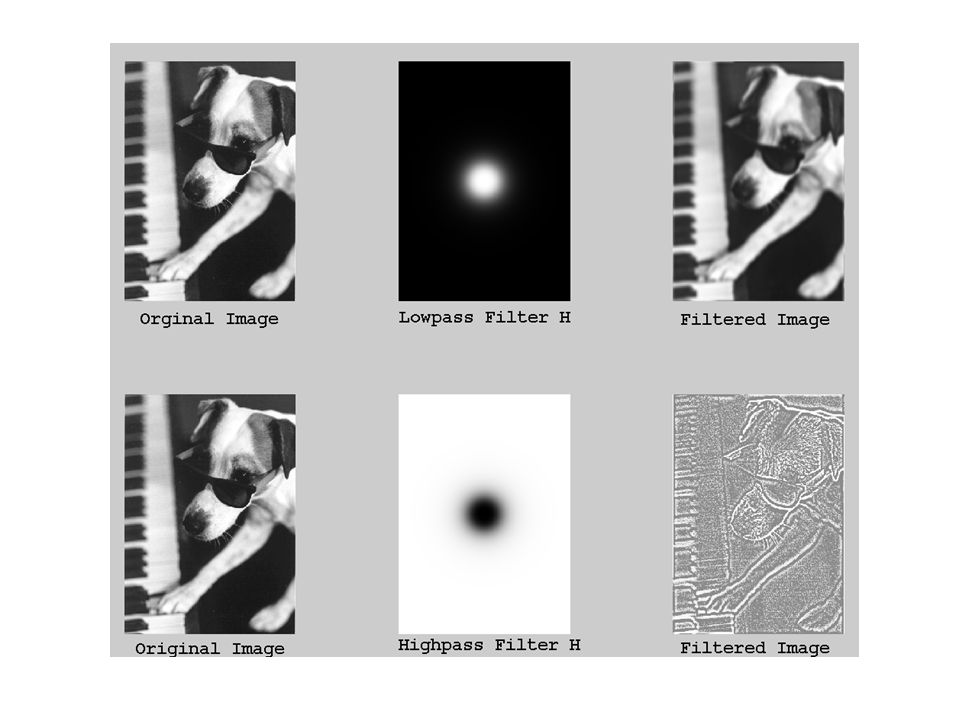
Ideal Low Pass Filter where d(u,v) is the distance of (u,v) from the centre of the filter and d0 is a positive number (the radius of the white circle). for smoothing and blurring Ideal High Pass Filter for extracting the details of an image
 is the distance of (u,v) from the centre of the filter and d0 is a positive number (the radius of the white circle). for smoothing and blurring. Ideal High Pass Filter. for extracting the details of an image.")
34
Other Ideal Filters The ideal bandpass filter retains the frequencies inside a given band and eliminates all the other. The ideal bandreject filter eliminates the frequencies inside a given band and retains all the other.

35
Frequency Domain Filtering
Multiply by a filter in the frequency domain <=> convolve with the fiter in spatial domain. Fourier Amplitude

36
Examples of ILPF FT Ringing and Blurring
Ideal in frequency domain means non-ideal in spatial domain, vice versa.

37
Butterworth Lowpass Filter
Transfer function Where D0 = cut off frequency, n = filter order.

38
Notes on BLPF The image to be filtered is an MxN pixeled image
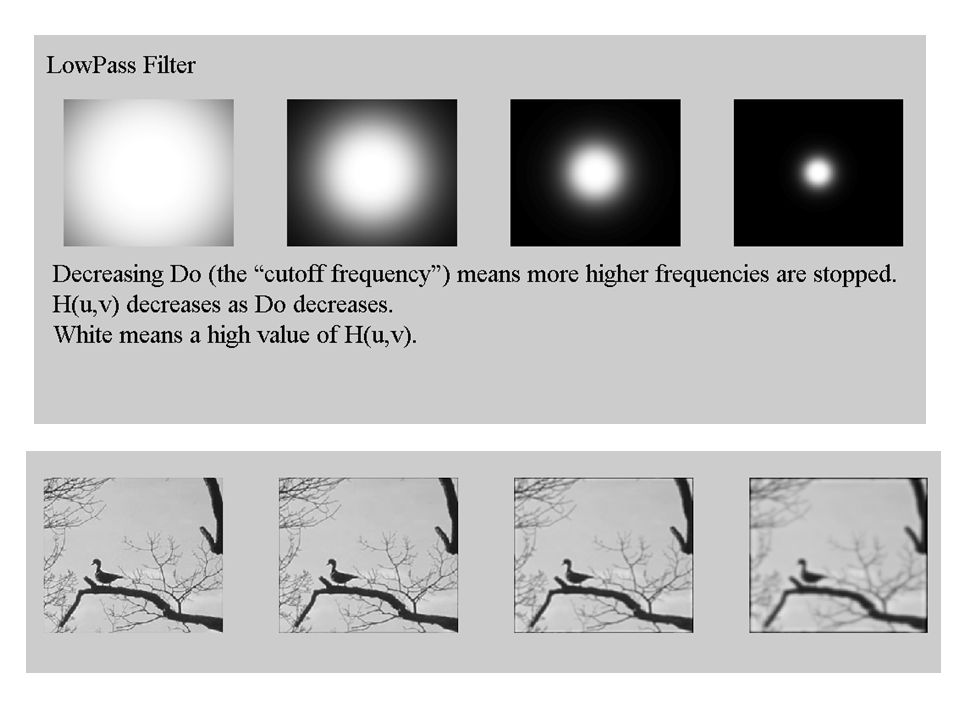
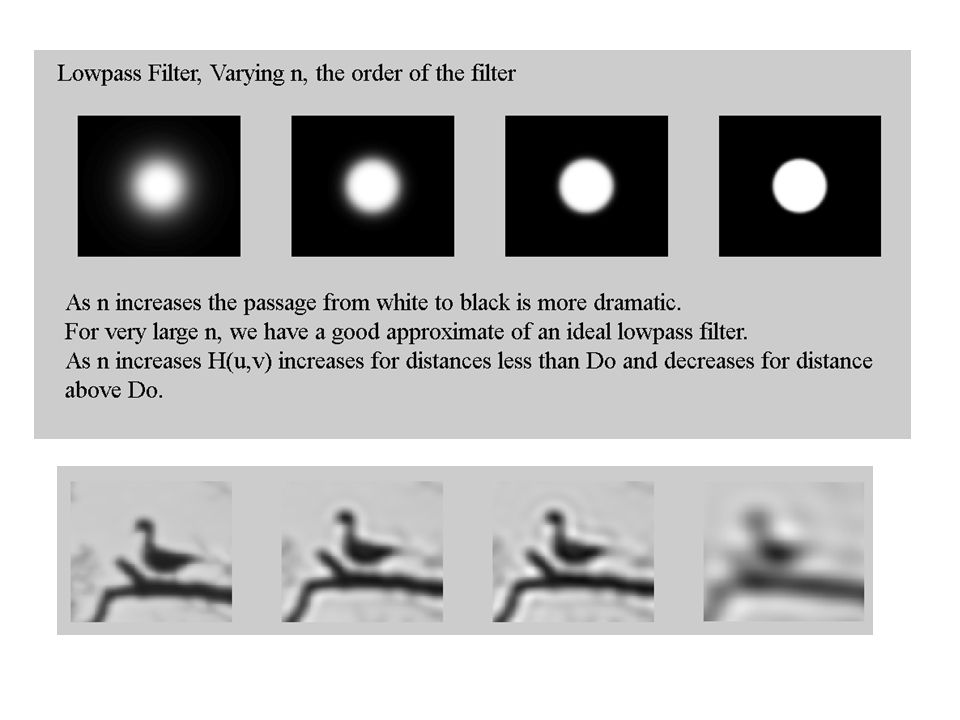
D(u,v) is the distance from the centre to the point (u,v), given by the formula For a lowpass filter, this means that as D(u,v) increases, H(u,v) decreases. The effect is to dampen the higher frequencies which are represented as being a distance far from the centre and emphasise the lower frequencies which are represented by points close to the centre D0 is known as the “cutoff” frequency. In an ideal lowpass filter, this is the point past which all frequencies would be eliminated. Increasing D0 increases the number of frequencies that are “passed” (or lessens the dampening effects of higher frequencies) Decreasing D0 means a smaller number of frequencies are allowed to pass (or the dampening effects of higher frequencies are increased). This would result in a more blurred image. n is the order of the filter. Increasing n increases and decreases H(u,v) for D(u,v) less than and greater than D0 respectively, which means there is a dramatic passage from those frequencies which are kept and those which are dampened/eliminated. As n increases, H(u,v) nears zero when the value of D(u,v) is high. When n is very high, it is a good approximate of an ideal lowpass filter.
![]()
39
Results of BLPF There is less ringing effect compared to
those of ideal lowpass filters!

40
Examples of IHPF Ringing effect can be obviously seen!

41
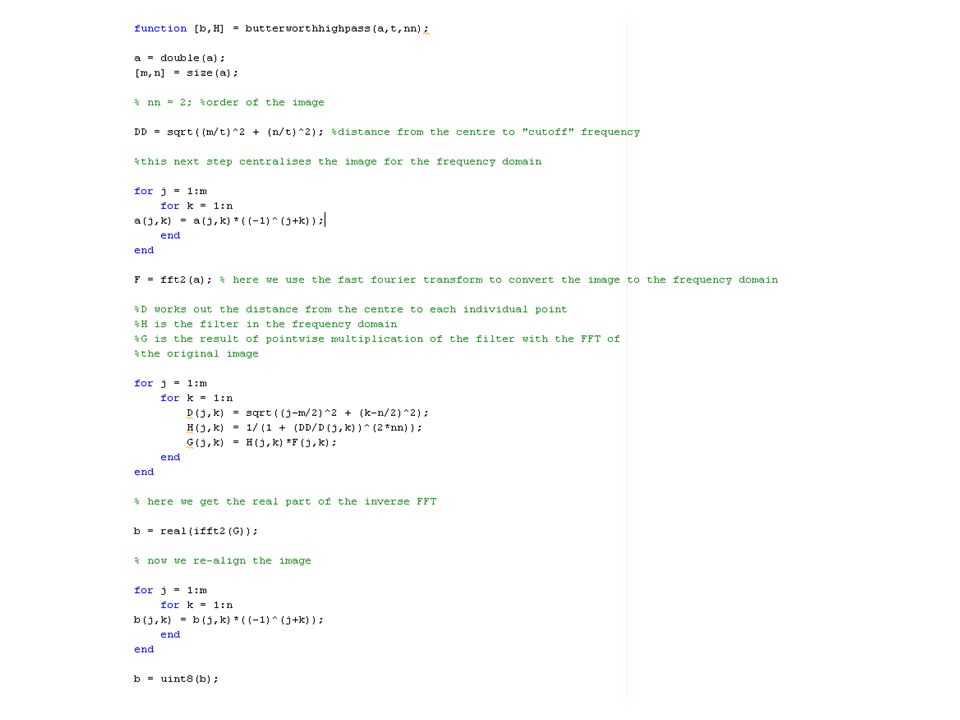
Butterworth High Pass Filters
The Butterworth high pass filter is given as: where n is the order and D0 is the cut off distance as before 41

42
Results of BHPF

47
General Filtering Method
First we centre the image Why? What does that mean? It means that when we apply the Fourier transform, the lowest frequencies will be in the centre and the highest frequencies will be around the edges. Secondly we compute the Fourier Transform as above

48
General Filtering Method
Now we multiply by a filter function H(u,v), i.e. (or if you’re fussy) Note that this is not matrix multiplication. It is pointwise (or point by point) multiplication. H(u,v) generally takes real values between 0 and 1 G(u,v) is complex-valued because F(u,v) is complex-valued
, i.e. (or if you’re fussy) Note that this is not matrix multiplication. It is pointwise (or point by point) multiplication. H(u,v) generally takes real values between 0 and 1. G(u,v) is complex-valued because F(u,v) is complex-valued.")
49
General Filtering Method
Calculate the Inverse Fourier Transform of G(u,v). using the Inverse Fourier Transform formula We then take the real part of g(x,y) (to remove any small complex residues) This is then multiplied by (-1)x+y to realign the image again and produce the final filtered image.
. using the Inverse Fourier Transform formula. We then take the real part of g(x,y) (to remove any small complex residues) This is then multiplied by (-1)x+y to realign the image again and produce the final filtered image.")
50
Property of DFT - Separability
f(x,y) Alternative 1 1-D DFT by row F(u,y) 1-D DFT by column Alternative 2 1-D DFT by column F(x,v) F(u,v) 1-D DFT by row
 Alternative 1. 1-D DFT. by row. F(u,y) 1-D DFT. by column. Alternative 2. 1-D DFT. by column. F(x,v) F(u,v) 1-D DFT. by row.")
52
Enhancement vs. Restoration
A process which aims to improve bad images so they will “look” better “Better” visual representation Subjective No quantitative measures A process which aims to invert known or estimated degradation to images Remove effects of sensing environment Objective Mathematical, model dependent quantitative measures

53
Inverse Filtering Simple (noiseless) case:
Then original image can be obtained by Note: H(u,v) may have zero or near zero values in most parts of (u,v) range at those points the division operation is undefined or results in meaningless values for points having very small |H(u,v)|, although the division can be done, the noise will be amplified to an intolerable extent restrict the area to low frequency part or use Gaussian weighting to solve this problem.
 may have zero or near zero values in most parts of (u,v) range. at those points the division operation is undefined or results in meaningless values. for points having very small |H(u,v)|, although the division can be done, the noise will be amplified to an intolerable extent. restrict the area to low frequency part or use Gaussian weighting to solve this problem.")
54
Acknowlegements Slides are modified based on the original slide set from Dr Li Bai, The University of Nottingham, Jubilee Campus plus the following sources: Digital Image Processing, by Gonzalez and Woods Digital Image Processing, a practical introduction using Java by Nick Efford An Intuitive Explanation of Fourier Theory

Similar presentations

>")
>")



>")













