Download presentation
Presentation is loading. Please wait.

1
Computer Vision Group UC Berkeley How should we combine high level and low level knowledge? Jitendra Malik UC Berkeley Recognition using regions is joint work with Chunhui Gu, Joseph Lim & Pablo Arbelaez (CVPR 2009)
.")
2
Computer Vision Group UC Berkeley The central problems of vision Grouping / Segmentation 3D structure/ Figure-Ground Object and Scene Recognition

3
Computer Vision Group UC Berkeley Detection and Segmentation: Giraffes Orig. ImageSegmentation Orig. ImageSegmentation

4
Computer Vision Group UC Berkeley Detection and Segmentation: Mugs Orig. ImageSegmentation Orig. ImageSegmentation

5
Computer Vision Group UC Berkeley Outline Current paradigm: Multiscale scanning Our approach –Bottom up region segmentation –Hough transform style voting (learned weights) –Top down segmentation Results on ETHZ, Caltech 101, MSRC
 –Top down segmentation Results on ETHZ, Caltech 101, MSRC")
6
Computer Vision Group UC Berkeley Detection: Is this an X? Ask this question repeatedly, varying position, scale, category… Paradigm introduced by Rowley, Baluja & Kanade 96 for face detection Viola & Jones 01, Dalal & Triggs 05, Felzenszwalb, McAllester, Ramanan 08

7
Computer Vision Group UC Berkeley Problems with the multi-scale scanning paradigm Computational complexity 10^6 windows, 10 scales, 10^4 categories Not natural for irregularly shaped objects Segmentation is delinked Context is delinked

8
Computer Vision Group UC Berkeley Our Approach Perceptual Organization provides the right primitives for visual recognition. After more than a decade of work, we finally have high quality, generic, detectors for contours and regions. We now only need to work with ~100 elements, each with its local scale estimate. In this talk, we demonstrate recognition using regions. Detection and segmentation happen in the same framework. There will always be some errors in the bottom-up grouping process, the recognition machinery needs to be robust to that.

9
Computer Vision Group UC Berkeley Contour Detection (CVPR 2008)
")
10
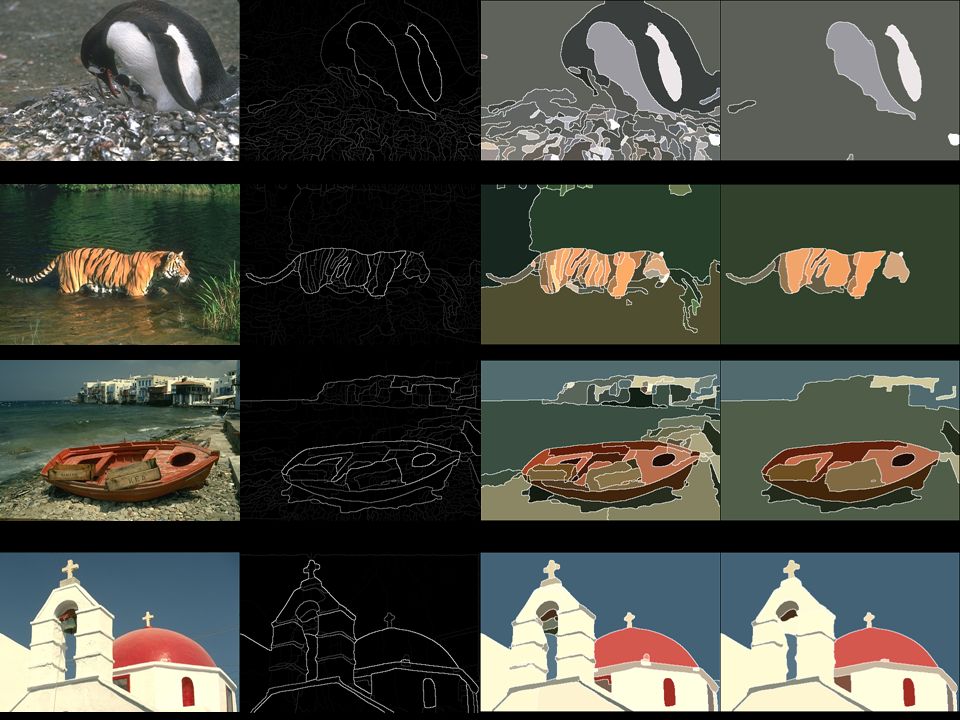
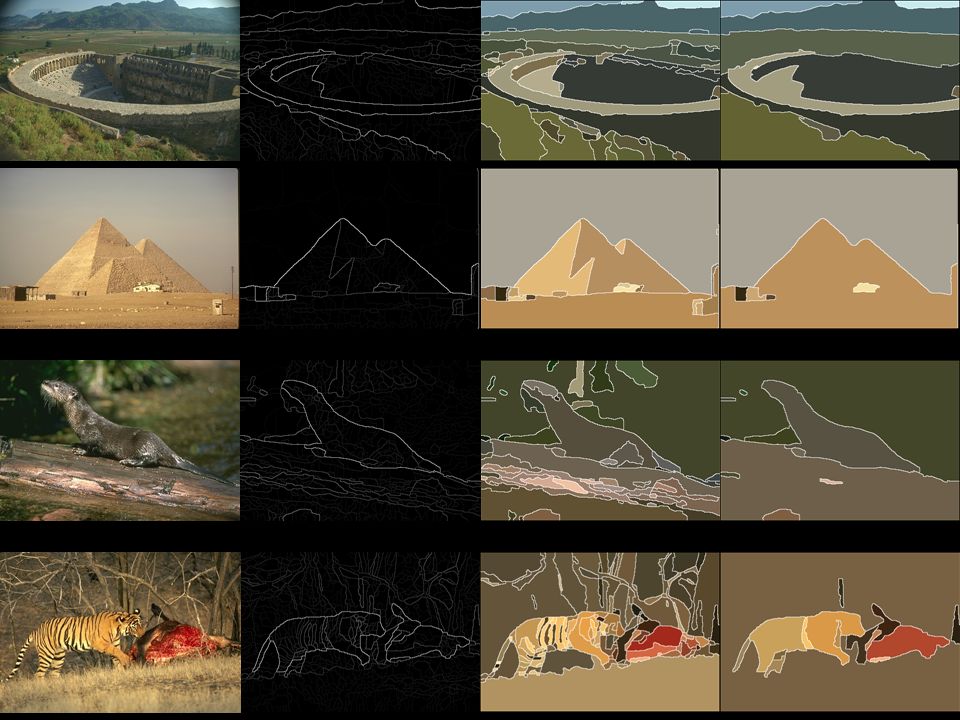
Computer Vision Group UC Berkeley Region Detection (CVPR 2009)
")
11
Computer Vision Group UC Berkeley Region detector wins on any measure! Region Benchmarks on BSDS Probabilistic Rand Index on BSDSVariation of Information on BSDS Region Benchmarks on MSRC/PASCAL08

16
Computer Vision Group UC Berkeley Parallelizing Image Segmentation Catanzaro et al, UC Berkeley, ICCV 09 GTX 280 is an Nvidia Graphics Processor, massively parallel general purpose computing platform –30 cores, 8 wide SIMD = 240 way parallelism –140 GB/s memory bandwidth (Modern CPUs have ~10-20 GB/s) –Special memory subsystems for graphics processing Sequential Implementation: 5 minutes per image Parallel, Optimized Implementation: 2 seconds
 –Special memory subsystems for graphics processing Sequential Implementation: 5 minutes per image Parallel, Optimized Implementation: 2 seconds")
17
Computer Vision Group UC Berkeley Why Use Regions? Local estimate of scale; no search necessary Shape, color and texture in the same framework Hierarchy of regions (partonomy) represents scenes, objects, parts. Makes use of context natural. Do not suffer from background clutter Reduce candidate windows on detection task –1000 to 10000 times fewer windows on the ETHZ dataset Need to be robust to segmentation errors
 represents scenes, objects, parts. Makes use of context natural. Do not suffer from background clutter Reduce candidate windows on detection task –1000 to times fewer windows on the ETHZ dataset Need to be robust to segmentation errors.")
18
Computer Vision Group UC Berkeley Object Representation using Regions Bag of Regions Region Segmentation

19
Computer Vision Group UC Berkeley Region Representation

20
Region-based Hough Voting Recover transformation from matched regions Transform exemplar bounding box to query 20 Exemplar Query T(x,y,s x,s y )
")
21
Region-based Voting Exemplar 1 Query 21

22
Region-based Voting Exemplar 1 Query 22

23
Region-based Voting Exemplar 1 Query 23

24
Region-based Voting Exemplar 1 Query 24

Similar presentations





>")

 Alexei A. Efros.>")

 Greg Mori, Xiaofeng Ren, Alexei A. Efros and Jitendra Malik ->")
 2013: Detection spotlights.>")










