Download presentation
Presentation is loading. Please wait.

1
Basic Communications Systems Class 3

2
Today’s Class Topics Interfacing RS-232 X.21 Asynchronous vs. Synchronous Multiplexing Frequency Division Multiplexing Time Division Multiplexing Wavelength Division Multiplexing Errors Detecting Errors Correcting Errors

3
Data Communications and Computer Networks Chapter 4 Interfacing Connecting a device such as a modem (or DCE - data circuit-terminating equipment or data communicating equipment) to a computer (or DTE - data terminal equipment). The connections between the DTE and DCE are the interchange circuits.

4
Data Communications and Computer Networks Chapter 4

5
Data Communications and Computer Networks Chapter 4 Interface Standards Many different groups contribute to interface standards: International Telecommunications Union (ITU) Electronics Industries Association (EIA) Institute for Electrical and Electronics Engineers (IEEE) International Organization for Standards (ISO) American National Standards Institute (ANSI)
 Electronics Industries Association (EIA) Institute for Electrical and Electronics Engineers (IEEE) International Organization for Standards (ISO) American National Standards Institute (ANSI)")
6
Data Communications and Computer Networks Chapter 4 Interface Standards All interface standards consist of four components: 1. The electrical component 2. The mechanical component 3. The functional component 4. The procedural component

7
Data Communications and Computer Networks Chapter 4 Interface Standards The electrical component deals with voltages, line capacitance, and other electrical characteristics. The mechanical component deals with items such as the connector or plug description. A standard connector is the ISO 2110 connector, also known as DB-25.

8
Data Communications and Computer Networks Chapter 4

9
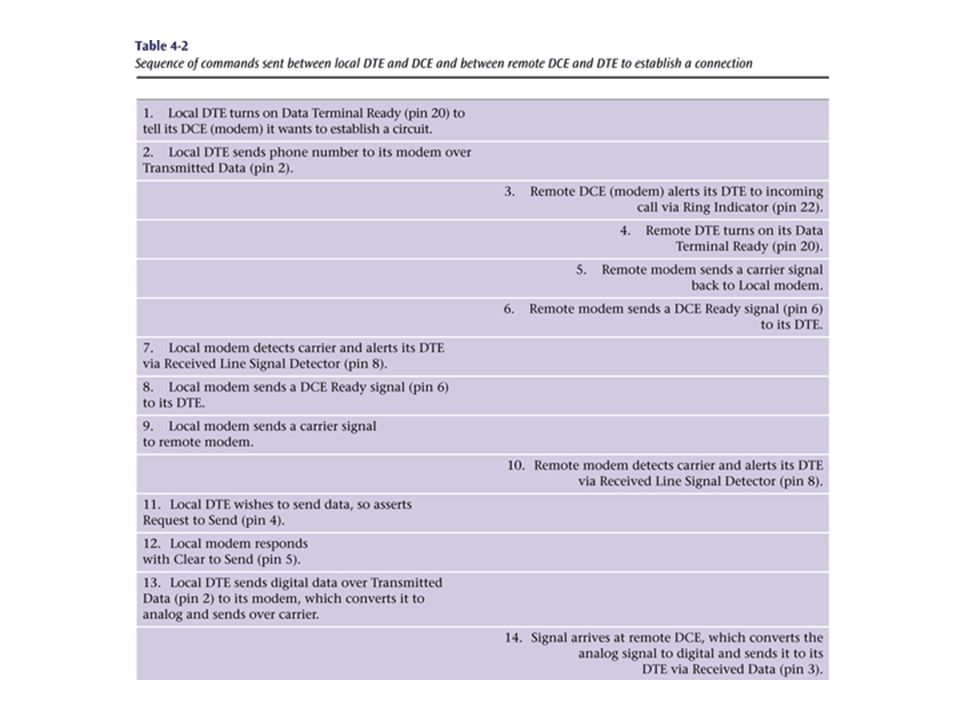
Data Communications and Computer Networks Chapter 4 Interface Standards The functional component describes the function of each pin or circuit that is used in a particular interface. The procedural component describes how the particular circuits are used to perform an operation. For example, the functional component may describe two circuits, Request to Send and Clear to Send. The procedural component describes how those two circuits are used so that the DTE can transfer data to the DCE.

10
Data Communications and Computer Networks Chapter 4

11
Data Communications and Computer Networks Chapter 4

12
Data Communications and Computer Networks Chapter 4 RS-232 and EIA-232E An older interface standard designed to connect a device such as a modem to a computer or terminal. Originally RS-232 but has gone through many revisions. The electrical component is defined by V.28, the mechanical component is defined by ISO 2110, and the functional and procedural components are defined by V.24.

14
Data Communications and Computer Networks Chapter 4 X.21 Another interface standard that was designed to replace the aging RS-232. Currently popular in Europe and with ISDN connections. Each circuit in the X.21 standard can contain many different signals. Since each circuit can transmit different signals, the combination of signals on the four circuits is much larger than if each circuit performed only a single function.

15
Data Communications and Computer Networks Chapter 4

16
Data Communications and Computer Networks Chapter 4 Interfacing a Computer and a Peripheral Firewire - A bus that connects peripheral devices such as wireless modems and high speed digital video cameras to microcomputers. Designated as IEEE 1394. Firewire supports asynchronous connections and isochronous connections (provides a guaranteed data transport at a pre-determined rate).
..")
17
Data Communications and Computer Networks Chapter 4 Interfacing a Computer and a Peripheral Universal Serial Bus (USB) - Modern standard for interconnecting modems and other peripheral devices to microcomputers. Support plug and play. USB can daisychain multiple devices. Like Firewire, USB is a high speed connection.

18
Data Communications and Computer Networks Chapter 4 Asynchronous Connections A type of connection defined at the data link layer. To transmit data from sender to receiver, an asynchronous connection creates a one-character package called a frame. Added to the front of the frame is a Start bit, while a Stop bit is added to the end of the frame. An optional parity bit can be added to the frame which can be used to detect errors.

19
Data Communications and Computer Networks Chapter 4

20
Data Communications and Computer Networks Chapter 4

21
Data Communications and Computer Networks Chapter 4 Synchronous Connections A second type of connection defined at the data link layer. A synchronous connection creates a large package (frame) that consists of header and trailer flags, control information, optional address information, error detection code (checksum), and the data. A synchronous connection is more elaborate but transfer data in a more efficient manner.
 that consists of header and trailer flags, control information, optional address information, error detection code (checksum), and the data. A synchronous connection is more elaborate but transfer data in a more efficient manner..")
22
Data Communications and Computer Networks Chapter 4

23
Data Communications and Computer Networks Chapter 4 Half Duplex, Full Duplex, and Simplex Connections A half duplex connection transmits data in both directions but in only one direction at a time. A full duplex connection transmits data in both directions and at the same time. A simplex connection can transmit data in only one direction.

24
Data Communications and Computer Networks Chapter 4 Terminal-to-Mainframe Computer Connections A point-to-point connection is a direct, unshared connection between a terminal and a mainframe computer. A multipoint connection is a shared connection between multiple terminals and a mainframe computer. The mainframe is called the primary, and the terminals are called the secondaries.

25
Data Communications and Computer Networks Chapter 4

26
Data Communications and Computer Networks Chapter 4 Terminal-to-Mainframe Computer Connections To allow a terminal to transmit data to a mainframe, the mainframe must poll the terminal. Two basic forms of polling include roll-call polling and hub polling. In roll-call polling, the mainframe polls each terminal in a round-robin fashion. In hub polling, the mainframe polls the first terminal, and this terminal passes the poll onto the next terminal.

27
Data Communications and Computer Networks Chapter 4

28
Data Communications and Computer Networks Chapter 4 Making Computer Connections In Action The back panel of a personal computer has many different types of connectors, or connections: RS-232 connectors USB connectors Parallel printer connectors Serial port connectors

29
Data Communications and Computer Networks Chapter 4

30
Chapter 5 Multiplexing : Sharing a Medium Data Communications and Computer Networks: A Business User’s Approach

31
Data Communications and Computer Networks Chapter 5 Introduction Under the simplest conditions, a medium can carry only one signal at any moment in time. For multiple signals to share one medium, either (a)the medium must somehow be divided, giving each signal a portion of the total bandwidth, OR (b)Multiple signals must be combined into a single signal The current techniques that can accomplish this include frequency division multiplexing, time division multiplexing, and wavelength division multiplexing.
the medium must somehow be divided, giving each signal a portion of the total bandwidth, OR (b)Multiple signals must be combined into a single signal The current techniques that can accomplish this include frequency division multiplexing, time division multiplexing, and wavelength division multiplexing..")
32
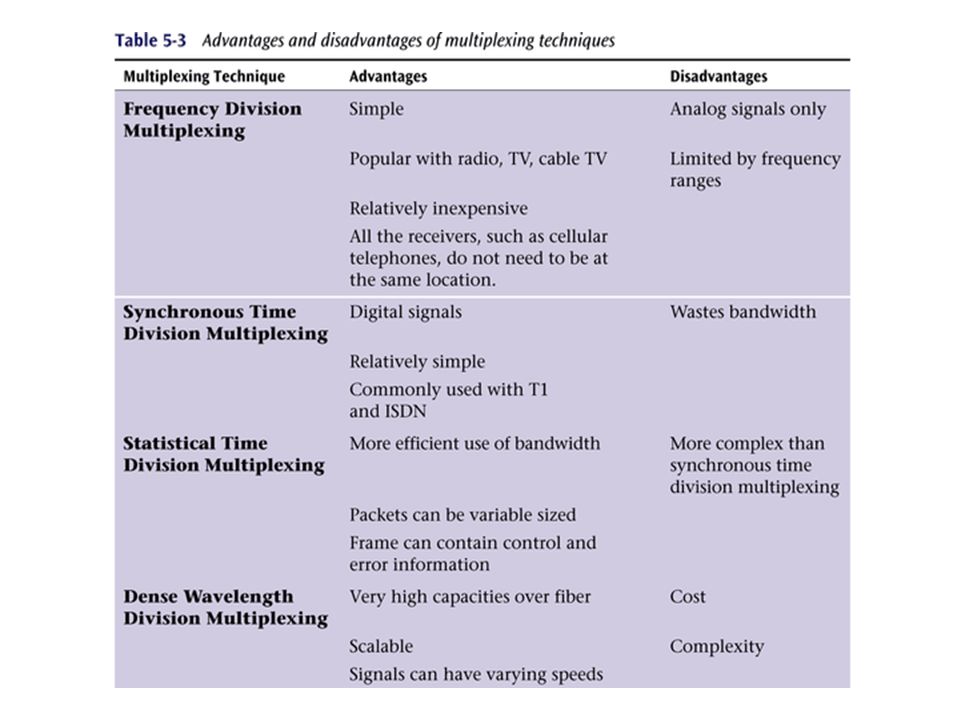
Data Communications and Computer Networks Chapter 5 Frequency Division Multiplexing (FDM) Assignment of non-overlapping frequency ranges to each “user” or signal on a medium. A multiplexor accepts multiple analog inputs inputs and assigns frequencies to each device. Modulation is used to move input signals into the assigned frequency ranges. The multiplexor is attached to a high-speed communications line. A corresponding demultiplexor on the other end of the line separates the multiplexed signals. FDM is only used with analog signals

33
Data Communications and Computer Networks Chapter 5

34
Data Communications and Computer Networks Chapter 5 Frequency Division Multiplexing Analog signaling is used to transmit the signals. Broadcast radio and television, cable television, and the AMPS cellular phone systems use frequency division multiplexing. This technique is the oldest multiplexing technique. Since it involves analog signaling, it is more susceptible to noise.

35
Data Communications and Computer Networks Chapter 5 Time Division Multiplexing Sharing of the signal is accomplished by dividing available transmission time on a medium among users. Digital signaling is used exclusively. Time division multiplexing comes in two basic forms: Synchronous time division multiplexing, and Statistical, or asynchronous time division multiplexing.

36
Data Communications and Computer Networks Chapter 5 Synchronous Time Division Multiplexing The original time division multiplexing. Assigns a static fixed bandwidth (in bps) to each input device. The multiplexor accepts input from attached devices in a round-robin fashion and transmits the data in a never ending pattern. T1 and ISDN telephone lines are common examples of synchronous time division multiplexing.
 to each input device. The multiplexor accepts input from attached devices in a round-robin fashion and transmits the data in a never ending pattern. T1 and ISDN telephone lines are common examples of synchronous time division multiplexing..")
37
Data Communications and Computer Networks Chapter 5

38
Data Communications and Computer Networks Chapter 5 Synchronous Time Division Multiplexing If one device generates data at a faster rate than other devices, then the multiplexor must sample the incoming data stream from that device more often than it samples the other devices. If a device has nothing to transmit, the multiplexor will still insert a piece of data (typically just 0 bits) from that device into the multiplexed stream as a placeholder.
 from that device into the multiplexed stream as a placeholder..")
39
Data Communications and Computer Networks Chapter 5

40
Data Communications and Computer Networks Chapter 5

41
Data Communications and Computer Networks Chapter 5 So that the receiver may stay synchronized with the incoming data stream, the transmitting multiplexor can insert 1s and 0s into the data stream that act as synchronization bits. Receiver looks for synch bits to make sure it stays on track

42
Digital Carrier Systems Carrier Systems: Standard multiplexed digital trunks developed by Bell System starting in early 1960s. All use Synchronous Time Division Multiplexing to derive multiple digital voice channels (64 Kbps) on a high-speed digital circuit.
 on a high-speed digital circuit..")
43
T-Carrier Systems

44
The T1 System T1 was the first T-carrier system deployed by the Bell System (in 1962) Carries 24 digital signals of 64 Kbps each. Total Bit Rate: 1.544 Mbps: Digital Information: 1.536 Mbps Framing Bits: 8 Kbps T1 multiplexor is called a channel bank.

45
T1 uses TDM T1 uses TDM to share the circuit among 24 channels T1 multiplexor allocates exactly one byte per frame to each time slot Each time slot carries exactly 8*8000 = 64 Kbps of bandwidth Bandwidth is pre-reserved even if no data is currently being sent

46
Channel Banks T-1 Channel Bank converts between 24 analog voice channels and a single T-1 trunk. Digitizes 24 voices (codec function) Combines 24 DS0 signals into a DS1 signal (multiplexing function)
 Combines 24 DS0 signals into a DS1 signal (multiplexing function).")
47
T1 Details Bipolar Representation T1 uses Bipolar Coding to represent 1 and 0 bits ‘1’ bit represented by alternating +3 volt, - 3 volt pulses ‘0’ bits represented by no voltage Framed Format T1 transmits 8000 frames per second, 193 bits per frame (8000 * 193 = 1,544,000).
.")
48
Bipolar Representation

49
T1 Frame Format n Each DS0 called a time slot n 8000 frames/sec * 8 bits/slot = 64 Kbps n 24 * 8 + 1 = 193 bits/frame n 8000 frames/sec * 193 bits/frame = 1.544 Mbps n 8000 Framing bits sent per second

50
Synchronous Optical Network (SONET) The SONET Hierarchy is a more modern digital infrastructure than T-carriers. Developed in 1980s by BellCore Also uses Synchronous Time Division Multiplexing to deliver channels that are multiples of 64 Kbps. Designed to only be used over high-quality fiber optic transmission systems.

51
SONET Systems

52
ISDN The Idea: Provides a fully-digital signal between customer and telephone network over current telephone lines. Uses Synchronous Time Division Multiplexing to provide customer with three separate digital channels at the same time.

53
ISDN Basic Rate Interface 3 data channels are sent in one digital signal using Synchronous Time Division Multiplexing: 2 B-channels (64-Kbps) used for digitized voice 56/64 Kbps dial-up data channels 1 D-channel (16-Kbps) used for Intelligent digital signaling messages carrying Caller ID, call parameters, etc. Packet-switched data transmission

54
ISDN ISDN Framing Transmit 4000 frames per second Each frame contains 16 bits for B channel 1 16 bits for B channel 2 4 bits for D channel Resulting channel bandwidths: B-channels are 4000 * 16 = 64 Kbps D-channel is 4000 * 4 = 16 Kbps

55
Data Communications and Computer Networks Chapter 5 The ISDN multiplexor stream is also a continuous stream of frames. Each frame contains various control and sync info.

56
BRI Applications Work-at-Home: Simultaneously use 1 B-channel for voice call 1 B-channel for dial-up 64 Kbps data to mainframe X.25 data transfer over D-channel Internet Access up to 128 Kbps using both B-channels Low-cost Business Videoconferencing Low-speed dial-up LAN Interconnection

57
Data Communications and Computer Networks Chapter 5 Statistical Time Division Multiplexing A statistical multiplexor transmits only the data from active workstations. If a workstation is not active, no space is wasted on the multiplexed stream. A statistical multiplexor accepts the incoming data streams and creates a frame containing only the data to be transmitted.

58
Data Communications and Computer Networks Chapter 5

59
Data Communications and Computer Networks Chapter 5 To identify each piece of data, an address is included.

60
Data Communications and Computer Networks Chapter 5 If the data is of variable size, a length is also included.

61
Data Communications and Computer Networks Chapter 5 The transmitted frame contains a collection of data groups.

62
Packet Switching = Statistical Time Division Multiplexing A Packet Switch (or router) acts as a statistical time division multiplexor, allowing multiple devices to share a single physical line by carrying data packets for each one in turn when it transmits.
 acts as a statistical time division multiplexor, allowing multiple devices to share a single physical line by carrying data packets for each one in turn when it transmits.")
63
Packet Switching = Statistical Time Division Multiplexing

64
Data Communications and Computer Networks Chapter 5 Dense Wavelength Division Multiplexing Dense wavelength division multiplexing multiplexes multiple data streams onto a single fiber optic line. Different wavelength lasers (called lambdas) transmit the multiple signals. Each signal carried on the fiber can be transmitted at a different rate from the other signals.
 transmit the multiple signals. Each signal carried on the fiber can be transmitted at a different rate from the other signals..")
65
Data Communications and Computer Networks Chapter 5

66
Data Communications and Computer Networks Chapter 5

68
Chapter 6 Errors, Error Detection, and Error Control Data Communications and Computer Networks: A Business User’s Approach

69
Data Communications and Computer Networks Chapter 6 Introduction Noise is always present. If a communications line experiences too much noise, the signal will be lost or corrupted. Communication systems should check for transmission errors. Once an error is detected, a system may perform some action. Some systems perform no error control, but simply let the data in error be discarded.

70
Data Communications and Computer Networks Chapter 6 White Noise Also known as thermal or Gaussian noise Relatively constant and can be reduced. If white noise gets too strong, it can completely disrupt the signal.

71
Data Communications and Computer Networks Chapter 6

72
Data Communications and Computer Networks Chapter 6 Impulse noise One of the most disruptive forms of noise. Random spikes of power that can destroy one or more bits of information. Difficult to remove from an analog signal because it may be hard to distinguish from the original signal. Impulse noise can damage more bits if the bits are closer together (transmitted at a faster rate).
..")
73
Data Communications and Computer Networks Chapter 6

74
Data Communications and Computer Networks Chapter 6

75
Data Communications and Computer Networks Chapter 6 Crosstalk Unwanted coupling between two different signal paths. For example, hearing another conversation while talking on the telephone. Relatively constant and can be reduced with proper measures.

76
Data Communications and Computer Networks Chapter 6

77
Data Communications and Computer Networks Chapter 6 Echo The reflective feedback of a transmitted signal as the signal moves through a medium. Most often occurs on coaxial cable. If echo bad enough, it could interfere with original signal. Relatively constant, and can be significantly reduced.

78
Data Communications and Computer Networks Chapter 6

79
Data Communications and Computer Networks Chapter 6 Jitter The result of small timing irregularities during the transmission of digital signals. Occurs when a digital signal is repeater over and over. If serious enough, jitter forces systems to slow down their transmission. Steps can be taken to reduce jitter.

80
Data Communications and Computer Networks Chapter 6

81
Data Communications and Computer Networks Chapter 6 Attenuation The continuous loss of a signal’s strength as it travels through a medium.

82
Data Communications and Computer Networks Chapter 6 Error Prevention To prevent errors from happening, several techniques may be applied: - Proper shielding of cables to reduce interference - Telephone line conditioning or equalization - Replacing older media and equipment with new, possibly digital components - Proper use of digital repeaters and analog amplifiers - Observe the stated capacities of the media

83
Data Communications and Computer Networks Chapter 6 Error Detection Despite the best prevention techniques, errors may still happen. To detect an error, something extra has to be added to the data/signal. This extra is an error detection code. Let’s examine two basic techniques for detecting errors: parity checking, and cyclic redundancy checksum.

84
Data Communications and Computer Networks Chapter 6 Parity Checks Simple parity - If performing even parity, add a parity bit such that an even number of 1s are maintained. If performing odd parity, add a parity bit such that an odd number of 1s are maintained. For example, if the character 1001010 is to be sent, using even parity, a parity bit = 1 would be added to the character. If the character 1001011 is to be sent, using even parity, a parity bit = 0 would be added to the character.

85
Data Communications and Computer Networks Chapter 6 Parity Checks – what about 2 errors? What happens if the character 10010101 (parity bit is the last bit) experiences two bit errors and the first two 0s accidentally become two 1s? Thus, the following character is received: 11110101. Will there be a parity error? NO. Problem: Simple parity only detects even numbers of bits in error.
 experiences two bit errors and the first two 0s accidentally become two 1s. Thus, the following character is received: Will there be a parity error. NO. Problem: Simple parity only detects even numbers of bits in error..")
86
Data Communications and Computer Networks Chapter 6 Parity Checks Longitudinal parity detects more errors by adding a row of parity bits after a block of characters. The row of parity bits is actually a parity bit for each “column” of characters. The row parity bits plus the column parity bits add a greater redundancy to a block of characters.

87
Data Communications and Computer Networks Chapter 6

88
Data Communications and Computer Networks Chapter 6

89
Data Communications and Computer Networks Chapter 6 Parity Checks Both simple parity and longitudinal parity do not catch all errors. Simple parity only catches odd numbers of bit errors. Longitudinal parity catches errors if an odd number of bit errors occur in any row OR any column. Longitudinal parity also requires many check bits to be added to a block of data. We need a better error detection method. Cyclic Redundancy Checksum

90
Data Communications and Computer Networks Chapter 6 Cyclic Redundancy Checksum The CRC error detection method treats the packet of data to be transmitted as a large polynomial. Both transmitter and receiver must know the same generating polynomial. The transmitter takes the message polynomial and divides it by the generating polynomial. The quotient is discarded but the remainder is placed in a CRC data field in the message trailer.

91
Data Communications and Computer Networks Chapter 6 Cyclic Redundancy Checksum The message is transmitted to the receiver. The receiver divides the message (including CRC field at the end) by the same generating polynomial. If the remainder equals zero then there was no error during transmission! If the remainder does not equal zero, there was an error during transmission!
 by the same generating polynomial. If the remainder equals zero then there was no error during transmission. If the remainder does not equal zero, there was an error during transmission!.")
92
Data Communications and Computer Networks Chapter 6 CRC Advantages CRC calculation can easily be implemented in hardware, so this operation requires no processor time at sender or receiver. CRC does not generate much overhead. It adds 2 bytes or 4 bytes to a message (which may contain thousands of bytes of data). CRC catches the vast majority of all possible errors that can occur on a communications line!!
. CRC catches the vast majority of all possible errors that can occur on a communications line!!.")
93
Data Communications and Computer Networks Chapter 6

94
Data Communications and Computer Networks Chapter 6 Error Control Once an error is detected, what is the receiver going to do? 1. Do nothing 2. Return an error message to the transmitter 3. Fix the error with no further help from the transmitter

95
Data Communications and Computer Networks Chapter 6 Error Control Do nothing (discard the data) Seems like a strange way to control errors but some Data Link (layer 2) protocols, such as Frame Relay, and some Network Layer (layer 3) protocols, such as the Internet Protocol (IP), perform this type of error control. The idea is that we do not want to slow down our network by correcting errors in the network equipment. The error will eventually be resolved through a timeout and retransmission request that will be sent by higher-level software (such as Transport Layer).
..")
96
Data Communications and Computer Networks Chapter 6 Error Control Return a message to the transmitter This method has three basic formats: 1. Stop-and-wait ARQ 2. Go-back-N ARQ 3. Selective-reject ARQ “ARQ” stands for “Automatic Repeat Request” and indicates that errors are resolved by retransmitting the data again.

97
Data Communications and Computer Networks Chapter 6 Error Control Stop-and-wait ARQ is the simplest of the error control protocols. A transmitter sends a frame then stops and waits for an acknowledgment. If a positive acknowledgment (ACK) is received, the next frame is sent. If a negative acknowledgment (NAK) is received, the same frame is transmitted again.
 is received, the next frame is sent. If a negative acknowledgment (NAK) is received, the same frame is transmitted again..")
98
Data Communications and Computer Networks Chapter 6 Error Control Under Stop-and-wait ARQ, the transmitter also starts a timer each time a data frame is transmitted. If the transmitter sees NO response (ACK or NAK) after a certain timeout period, it will assume that something went wrong and it will retransmit the data frame.
 after a certain timeout period, it will assume that something went wrong and it will retransmit the data frame..")
99
Data Communications and Computer Networks Chapter 6

100
Data Communications and Computer Networks Chapter 6 Error Control Go-back-N ARQ and selective reject are more efficient protocols. They assume that multiple frames are in transmission at one time (sliding window protocols). A sliding window protocol allows the transmitter to send up to the window size frames before receiving any acknowledgments. When a receiver does acknowledge receipt, the returned ack contains the number of the frame expected next.
. A sliding window protocol allows the transmitter to send up to the window size frames before receiving any acknowledgments. When a receiver does acknowledge receipt, the returned ack contains the number of the frame expected next..")
101
Data Communications and Computer Networks Chapter 6

102
Data Communications and Computer Networks Chapter 6 Error Control Using the go-back-N ARQ protocol, if a frame arrives in error, the receiver can ask the transmitter to go back to the Nth frame and retransmit it. After the Nth frame is retransmitted, the sender resends all subsequent frames.

103
Data Communications and Computer Networks Chapter 6 Error Control Selective-reject ARQ is the most efficient error control protocol. If a frame is received in error, the receiver asks the transmitter to resend ONLY the frame that was in error. Subsequent frames following the Nth frame are not retransmitted. Figure 6-10 shows a normal transmission of frames with no errors, while Figures 6-11 and 6-12 show examples of errors.

104
Data Communications and Computer Networks Chapter 6

105
Data Communications and Computer Networks Chapter 6

106
Data Communications and Computer Networks Chapter 6

107
Data Communications and Computer Networks Chapter 6 Error Control Forward Error Correction For a receiver to correct the error with no further help from the transmitter requires a large amount of redundant information accompany the original data. This redundant information allows the receiver to determine the error and make corrections. This type of error control is often called forward error correction.

Similar presentations