Download presentation
Presentation is loading. Please wait.

1
H 0 (z) x(n)x(n) o(n)o(n) M G 0 (z) M + vo(n)vo(n) yo(n)yo(n) H 1 (z) 1(n)1(n) M G 1 (z) M v1(n)v1(n) y1(n)y1(n) fo(n)fo(n) f1(n)f1(n) y(n)y(n) Figure 31 H M-2 (z) M-2 (n) M G M-2 (z) M v M-2 (n) H M - 1 (z) M-1 (n) M G M-1 (z) M v M-1 (n) f M-2 (n) f M-1 (n) y M-1 (n)
 x(n)x(n) o(n)o(n) M G 0 (z) M + vo(n)vo(n) yo(n)yo(n) H 1 (z) 1(n)1(n) M G 1 (z) M v1(n)v1(n) y1(n)y1(n) fo(n)fo(n) f1(n)f1(n) y(n)y(n) Figure 31 H M-2 (z) M-2 (n) M G M-2 (z) M v M-2 (n) H M - 1 (z) M-1 (n) M G M-1 (z) M v M-1 (n) f M-2 (n) f M-1 (n) y M-1 (n)")
2
Without the decimator and interpolator, the input/output relationship is straightforward (32) With the decimator and interpolator, we have to take it step-by-step
 With the decimator and interpolator, we have to take it step-by-step")
3
(33)
")
4
(34) Decimated signal Images
 Decimated signal Images")
5
(33) (34) (35)
 (34) (35)")
6
(33) (34) (35) (36)
 (34) (35) (36)")
7
(33) (34) (35) (36)
 (34) (35) (36)")
8
(33) (34) (35) (36) (37)
 (34) (35) (36) (37)")
9
(33) (34) (35) (36) (37)
 (34) (35) (36) (37)")
10
(33) (34) (35) (36) (37)
 (34) (35) (36) (37)")
11
(38) (39) Alias Component (AC) matrix Note Y(z) is a 1x1 matrix!
 (39) Alias Component (AC) matrix Note Y(z) is a 1x1 matrix!")
12
Aliasing error Aliasing error free condition (40)
")
13
Aliasing error Aliasing error free condition (41)
")
14
Condition for perfect reconstruction is simple in theory, as However, Is complicated to solve and resulted in IIR synthesis filters.

15
An effective solution employing Polyphase decomposition Recalling, Or simply i.e.,

16
Similar treatment to the synthesis filter gives Or simply i.e.,

17
Diagram illustration: z -1

18
Diagram illustration: z -1 Can be replaced with their polyphase components, as

19
M M M M M M

20
M M M M M M z -1

21
M M M M M M

22
M M M M M M Results in perfect reconstruction

23
Implementing FIR filters for M-channel filter banks, to begin with, Noted that

24
Let Compute P(z)
")
25
It can be seen that both analysis and synthesis filters are FIR

26
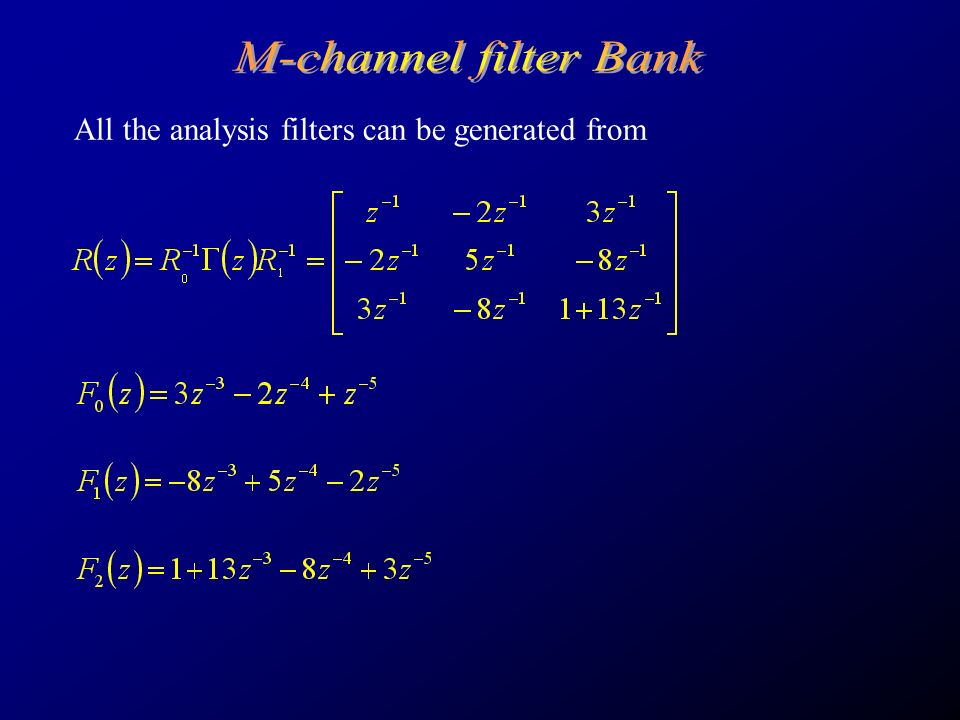
All the analysis filters can be generated from

31
Spectral Analysis Given f(n) = [f 0, f 1,....., f N-1 ] and an orthonormal basis i.e., The spectral (generalized Fourier) coefficients of f(n) are defined as (66) (67) Eqn. 66 and 67 define the orthonormal transform and its inverse
![Spectral Analysis Given f(n) = [f 0, f 1,....., f N-1 ] and an orthonormal basis i.e., The spectral (generalized Fourier) coefficients of f(n) are defined as (66) (67) Eqn.](http://images.slideplayer.com/21/6241811/slides/slide_31.jpg "66 and 67 define the orthonormal transform and its inverse.")
32
Spectral Analysis If the members of are sinusoidal sequences, the transform is known as the Fourier Transform The Parseval theorem - Conservation of Energy in orthonormal transform (68)
")
33
An Application - Spectral Analysis N N N f(n)f(n) 00 11 N-1 Orthonormal spectral analyser implemented with multirate filter bank Figure 32
f(n) 00 11 N-1 Orthonormal spectral analyser implemented with multirate filter bank Figure 32")
34
An Application - Spectral Analysis Transform efficiency - measured by decorrelation and energy compactness Correlation - Neighboring samples can be predicted from the current sample : an inefficient representation. Energy Compactness - The importance of each sample in forming the entire signal. If every sample is equally important, everyone of them has to be included in the representation: again an inefficient representation. An ideal transform: 1. Samples are totally unrelated to each other. 2. Only a few samples are necessary to represent the entire signal.

35
How to derive the optimal transform? Given a signal f(n), define the mean and autocorrelation as and Assume f(n) is wide-sense stationary, i.e. its statistical properties are constant with changes in time Defineand (69) (70)
, define the mean and autocorrelation as and Assume f(n) is wide-sense stationary, i.e. its statistical properties are constant with changes in time Defineand (69) (70).")
36
How to derive the optimal transform? (71) Equation 69 can be rewritten as The covariance of f is given by (72) (73)
 Equation 69 can be rewritten as The covariance of f is given by (72) (73).")
37
How to derive the optimal transform? The signal is transform to its spectral coefficients with eqn 66 Comparing the two sequences:

38
How to derive the optimal transform? The signal is transform to its spectral coefficients with eqn 66 Comparing the two sequences: a. Adjacent terms are related b. Every term is important a. Adjacent terms are unrelated b. Only the first few terms are important

39
How to derive the optimal transform? The signal is transform to its spectral coefficients with eqn 66 similar to f, we can define the mean, autocorrelation and covariance matrix for

40
How to derive the optimal transform? a. Adjacent terms are relateda. Adjacent terms are unrelated Adjacent terms are uncorrelated if every term is only correlated to itself, i.e., all off-diagonal terms in the autocorrelation function is zero. Define a measurement on correlation between samples: (74)
.")
41
How to derive the optimal transform? We assume that the mean of the signal is zero. This can be achieved simply by subtracting the mean from f if it is non- zero. The covariance and autocorrelation matrices are the same after the mean is removed.

42
How to derive the optimal transform? b. Every term is important b. Only the first few terms are important Note: If only the first L-1 terms are used to reconstruct the signal, we have (75)
.")
43
How to derive the optimal transform? If only the first L-1 terms are used to reconstruct the signal, the error is The energy lost is given by but, hence (76) (77) (78)
 (77) (78).")
44
How to derive the optimal transform? Eqn. 78 is valid for describing the approximation error of a single sequence of signal data f. A more generic description for covering a collection of signal sequences is given by: (79) An optimal transform mininize the error term in eqn. 79. However, the solution space is enormous and constraint is required. Noted that the basis functions are orthonormal, hence the following objective function is adopted.
 An optimal transform mininize the error term in eqn. 79. However, the solution space is enormous and constraint is required. Noted that the basis functions are orthonormal, hence the following objective function is adopted..")
45
How to derive the optimal transform? (80) The term r is known as the Lagrangian multiplier The optimal solution can be found by setting the gradient of J to 0 for each value of r, i.e., Eqn 81 is based on the orthonormal property of the basis functions. (81)
 The term r is known as the Lagrangian multiplier The optimal solution can be found by setting the gradient of J to 0 for each value of r, i.e., Eqn 81 is based on the orthonormal property of the basis functions. (81).")
46
How to derive the optimal transform? The solution for each basis function is given by (82) r is an eigenvector of R f and r is an eigenvalue Grouping the N basis functions gives an overall equation (83) R = R f = which is a diagonal matrix. The decorrelation criteria is satisfied (84)
 r is an eigenvector of R f and r is an eigenvalue Grouping the N basis functions gives an overall equation (83) R = R f = which is a diagonal matrix. The decorrelation criteria is satisfied (84).")
Similar presentations






1 Multirate DSP Digital Filter Banks Filter Banks and Subband Processing Applications and Advantages Perfect Reconstruction.>")





![1 Copyright © 2001, S. K. Mitra Polyphase Decomposition The Decomposition Consider an arbitrary sequence {x[n]} with a z-transform X(z) given by We can.](/16/5056602/big_thumb.jpg "1 Copyright © 2001, S. K. Mitra Polyphase Decomposition The Decomposition Consider an arbitrary sequence {x[n]} with a z-transform X(z) given by We can.>")






