Download presentation
Presentation is loading. Please wait.

1
Present Superatttenuator performance vs. AdV & ET Requirements S.Braccini for Virgo Suspension group

2
Passive Attenuation

4
Ground Mirror Resonances f -2N Long Pendula 2 Hz Transmission Soft Springs Frequency (Hz)
")
5
Blade Springs Magnetic Antisprings 8 m

6
Ground Seismic Noise Mirror Seismic Noise Rumore Termico

7
SA design e freccette Filter Chain TF measurements (without Pre-Isolator !)
")
8
SA design e freccette @ 4.1 Hz < 6 10e-8 CITF Measurements around 2, 4, 9 Hz

9
SA design e freccette CITF Measurements around 2, 4, 9 Hz @ 2.25 Hz 5 10e-6

10
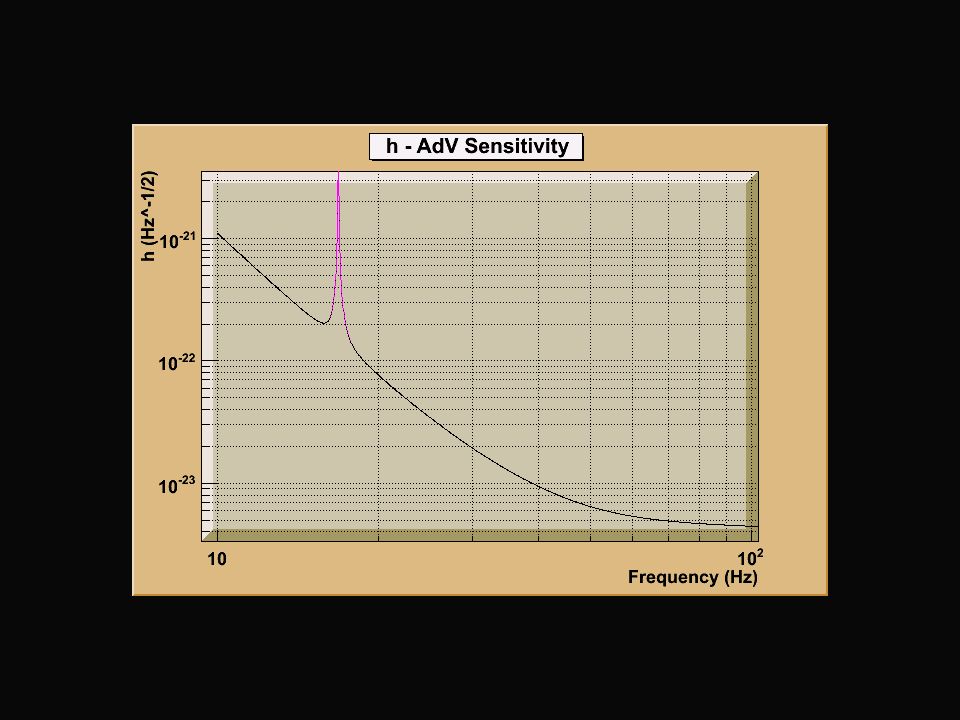
Thermal Noise Measured Upper Limit

12
L(f) = h(f) / 3000
 = h(f) / 3000")
13
TF max = L(f) /(LSD Ground Seismic Noise) LSD Ground Seismic Noise = 5 x 10 -7 / f 2
 /(LSD Ground Seismic Noise) LSD Ground Seismic Noise = 5 x / f 2")
14
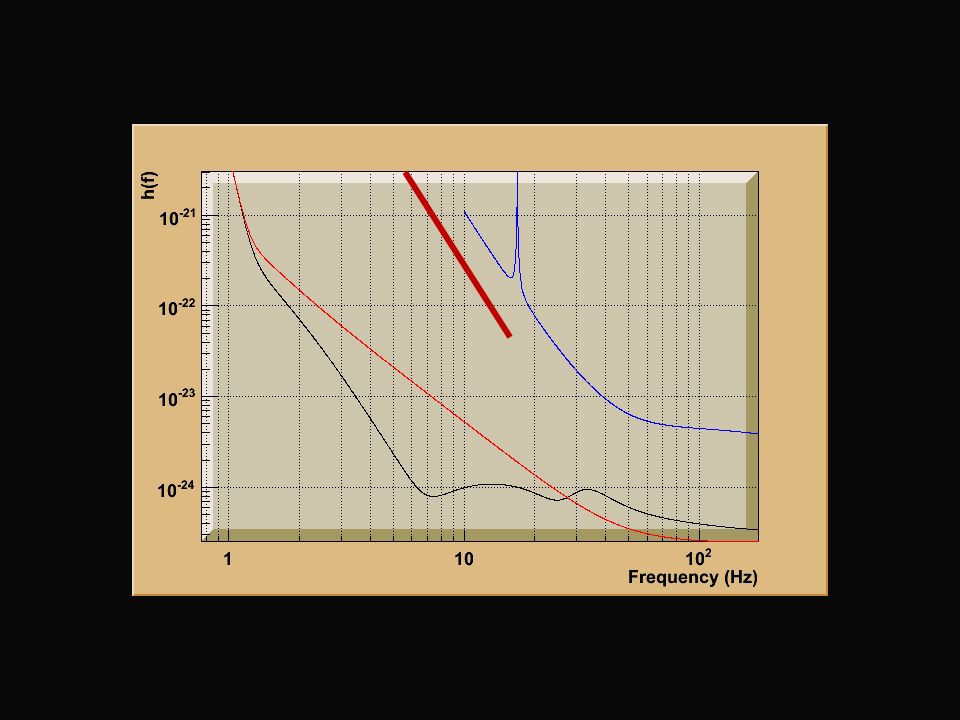
Same Exercise for ET sensitivity

15
L(f) = h(f) / 10000
 = h(f) / 10000")
16
TF max = L(f) /(LSD Under-Ground Seismic Noise) LSD Ground Seismic Noise (Kamioka) - 5 x 10 -9 / f 2 (Duzel Mine much better)
 /(LSD Under-Ground Seismic Noise) LSD Ground Seismic Noise (Kamioka) - 5 x / f 2 (Duzel Mine much better)")
17
Same Exercise for ET-Xylophone sensitivity

18
L(f) = h(f) / 10000
 = h(f) / 10000")
19
TF max = L(f) /(LSD Ground Seismic Noise) LSD Ground Seismic Noise (Kamioka) - 5 x 10 -9 / f 2
 /(LSD Ground Seismic Noise) LSD Ground Seismic Noise (Kamioka) - 5 x / f 2")
20
Valid both for horizontal and vertical seismic noise

21
High Sens Range Larger stability allows longer measurements

22
SA design e freccette frequency ( Hz ) Displacement ( m. Hz -1/2 ) Top Mirror Transfer Function < 10 -10
 Top Mirror Transfer Function <")
23
Stressed Measurement T = 41943 s High Sens Range TOP MIRROR 2 x 10 -18 m Hz -1/2 1.2 x 10 -6 m Hz -1/2 TF < 1.7 x 10 -12

24
!! TF = 1.26 x 10 -11

25
ET-Xylophone AdV 1.26 x 10 -11 + Pre-Isolator

26
SA design e freccette X-excitation SA design e freccette Possible Bypass

27
Bypass Indication ? X - Excitation Results

28
HORIZONTAL Integration TimeKind of MeasurementFrequency Disp Top (Lines LSD)Disp Mirror Upper Limit (LSD)TF (s)(Hz)(m Hz^-1/2) 10485Central interferometer2,304,80E-052,50E-105,21E-06 10485Central interferometer4,103,30E-052,00E-126,06E-08 About 20000 sWest Input Cavity Mirror4,304,31E-063,6E-148,36E-09 About 20000 sWest Input Cavity Mirror6,306,02E-065,4E-148,97E-09 10485Central interferometer9,805,70E-064,10E-137,19E-08 About 20000 sWest Input Cavity Mirror10,303,00E-061,8E-166,00E-11 About 20000 sWest Input Cavity Mirror18,302,85E-064,8E-171,68E-11 41943North Input Cavity Mirror29,302,95E-061,50E-175,08E-12 41943West Input Cavity Mirror30,309,39E-076,00E-176,39E-11 41943North End Cavity Mirror31,301,42E-061,80E-171,26E-11 41943West End Cavity Mirror32,301,22E-062,4E-181,97E-12 VERTICAL Included H-V Coupling Integration TimeKind of MeasurementFrequency Disp Top (Lines LSD)Disp Mirror Upper Limit (LSD)TF (s)(Hz)(m Hz^-1/2) 2620Central Interferometer2,251,70E-042,60E-101,53E-06 2620Central Interferometer4,103,00E-043,00E-121,00E-08 25165North Input Cavity Mirror29,301,22E-063,00E-182,47E-12 25165West Input Cavity Mirror30,303,88E-063,00E-187,73E-13 25165North End Cavity Mirror31,304,14E-063,00E-187,24E-13 25165West End Cavity Mirror32,304,43E-063,00E-186,77E-13 X-AXIS 8388North Input Cavity Mirror29,301,18E-063,9E-17 3,30E-11 8388West Input Cavity Mirror30,306,08E-071,26E-17 2,07E-11 8388North End Cavity Mirror31,306,3E-073,9E-18 6,19E-12 8388West End Cavity Mirror32,307,53E-072,31E-17 3,07E-11 Red = Line Detected Blue = Line Not Detected Purple = Upper Limit not useful (too large)
Disp Mirror Upper Limit (LSD)TF (s)(Hz)(m Hz^-1/2) 10485Central interferometer2,304,80E-052,50E-105,21E Central interferometer4,103,30E-052,00E-126,06E-08 About sWest Input Cavity Mirror4,304,31E-063,6E-148,36E-09 About sWest Input Cavity Mirror6,306,02E-065,4E-148,97E Central interferometer9,805,70E-064,10E-137,19E-08 About sWest Input Cavity Mirror10,303,00E-061,8E-166,00E-11 About sWest Input Cavity Mirror18,302,85E-064,8E-171,68E North Input Cavity Mirror29,302,95E-061,50E-175,08E West Input Cavity Mirror30,309,39E-076,00E-176,39E North End Cavity Mirror31,301,42E-061,80E-171,26E West End Cavity Mirror32,301,22E-062,4E-181,97E-12 VERTICAL Included H-V Coupling Integration TimeKind of MeasurementFrequency Disp Top (Lines LSD)Disp Mirror Upper Limit (LSD)TF (s)(Hz)(m Hz^-1/2) 2620Central Interferometer2,251,70E-042,60E-101,53E Central Interferometer4,103,00E-043,00E-121,00E North Input Cavity Mirror29,301,22E-063,00E-182,47E West Input Cavity Mirror30,303,88E-063,00E-187,73E North End Cavity Mirror31,304,14E-063,00E-187,24E West End Cavity Mirror32,304,43E-063,00E-186,77E-13 X-AXIS 8388North Input Cavity Mirror29,301,18E-063,9E-17 3,30E West Input Cavity Mirror30,306,08E-071,26E-17 2,07E North End Cavity Mirror31,306,3E-073,9E-18 6,19E West End Cavity Mirror32,307,53E-072,31E-17 3,07E-11 Red = Line Detected Blue = Line Not Detected Purple = Upper Limit not useful (too large)")
29
ET-Xylophone AdV Upper LimitDetected Without Pre-Isolator (Just filter chain !) 53113 IP Guarantees for this ! Already compliant for ET (Remind that we are speaking of “Upper Limits”

30
Vertical TF measurements (Coupling included in the measurement)
")
31
Vertical Measurements

32
ET-Xylophone AdV Without Filter Zero (Just filter chain !) 60 F0 Guarantees for this UPPER LIMIT (!) compliant for ET Vertical Upper LimitVertical Detected
 60 F0 Guarantees for this UPPER LIMIT (!) compliant for ET Vertical Upper LimitVertical Detected")
33
Preisolator makes safety margin wide in AdV

34
SA are compliant also for ET starting from 4 Hz.... What happens below?

35
@ 2.25 Hz 5 10e-6 Remarkable Attenuation also at 2.25 Hz HORIZONTAL

36
@ 2.25 Hz 1.5 10e-6 Remarkable Attenuation also at 2.25 Hz VERTICAL

37
Yes No Maybe 423 TF f Model Meas. Stage by Stage Measurement (and Model)
")
38
ET Design Programme Cut-off 3-4 Hz No Design Study Cut-off 1-2 Hz Design Study SCIENCE CASE & NEWTONIAN NOISE TO BE DISCUSSED AT ERICE MEETING

39
N 1 Hz 2 Hz ------------------------- {3, 1.6*10-7, 5.4*10-10} {4, 4.8*10-8, 3.3*10-11} {5, 2.6*10-8, 3.4*10-12} {6, 2.3*10-8, 6.7*10-12} {7, 2.1*10-8, 2.6*10-12} Optimized at 1Hz Courtesy G. Cella Horizontal ~50 m G.Cella

40
Simulations + Analytical Computation in progress

41
Actuation Noise

42
Coil Magnet V V -0.2 0.2 V Cavity Length V -0.2 0.2 /100 Locking

44
M Flex Joint g 30 mHz Inverted Pendulum

45
ADC DSPDAC Actuators Accelerometers

46
Superattenuatore Sensors Coil Drivers Motors Sensors Coil Drivers Position & Dampin g DSP: - 96 bit - 60 MFLOPs DAC: - 8 Chan. - 20 bit - 500 KHz ADC: - 8 Chan. -16 bit SAR - 200 KHz Acc. Sens: - 10 -9 m/s 2 - 0 – 100Hz - f.s. 1g Control Electronics System

47
Hierarchical Control

48
ADC DSPDAC Actuators Accelerometers RESIDUAL SWING < 0.1 m

49
WIND SEA MIRROR ACTUATION

50
Tilt

51
Direct Measurement on the ITF !! A.Gennai (VIR 029-A09)
")
52
Distribution and (its integral) of the maximum of the absolute values of marionetta correction voltage computed on 200 s-long interval (all VSR1 run, itf in science mode)
 of the maximum of the absolute values of marionetta correction voltage computed on 200 s-long interval (all VSR1 run, itf in science mode)")
53
Calm Any

54
Calm Any

55
Setting the marionetta actuation range to 2.2 V we “risk” 1% of duty cycle Calm Any Actuation Noise Reduction by a factor 4 immediately available !

56
Reduction factor 3-4 Wind (5%) 7-8 Calm (95 %) Direct Meas. Now Calm Wind AdV Many other possibility to reduce noise

58
2009-10 SAFE Resp: F.Frasconi

59
Tilt Control

60
Recent upgrades Gyrolaser: A.Di Virgilio’s group provided an instrument able to monitor ground tilt with the required sensitivity (close to 10 -9 rad/Hz 1/2 ) with high duty cycle. Tiltmeters: The flex-joint solution was killed. A new prototype concevied by A.Giazotto based on a complete different design was assembled (excellent mechanical performance). Piezo Actuation: The entire electro-mechanical system was assembled by F.Frasconi on SAFE bottom ring and monitored by LVDT. Preliminary tests are very encouraging. Vertical to Horizontal Coupling: The MSC group measured the coupling factor exciting marionetta in vertical and looking at the itf with a “surprising result” (TBC).
. Piezo Actuation: The entire electro-mechanical system was assembled by F.Frasconi on SAFE bottom ring and monitored by LVDT. Preliminary tests are very encouraging. Vertical to Horizontal Coupling: The MSC group measured the coupling factor exciting marionetta in vertical and looking at the itf with a surprising result (TBC)..")
61
AdV: SA performance are compliant with AdV both for passive isolation and actuation noise ET: Present SA attenuation good also for the ET project (not too demanding above a few Hz) Passive isolation compliant above about 3-4 Hz Design Study necessary if lower frequency will be investigated Actuation Noise is the major concern Conclusions
 Passive isolation compliant above about 3-4 Hz Design Study necessary if lower frequency will be investigated Actuation Noise is the major concern Conclusions")
Similar presentations




 Inverted Pendulum Control for KAGRA Seismic Attenuation System 1 D2, Institute for Cosmic Ray.>")
 part II: the Vibration.>")






>")





 LCGT-Virgo meeting.>")


