Download presentation
Presentation is loading. Please wait.

1
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Chapter 17 AC Machines

2
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Chapter 17 AC Machines 1.Select the proper ac motor type for various applications. 2. State how torque varies with speed for various ac motors.

3
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. 3. Compute electrical and mechanical quantities for ac motors. 4. Use motor nameplate data. 5. Understand the operation and characteristics of three-phase induction motors, three-phase synchronous machines, various types of single- phase ac motors, stepper motors, and brushless dc motors.

4
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

5
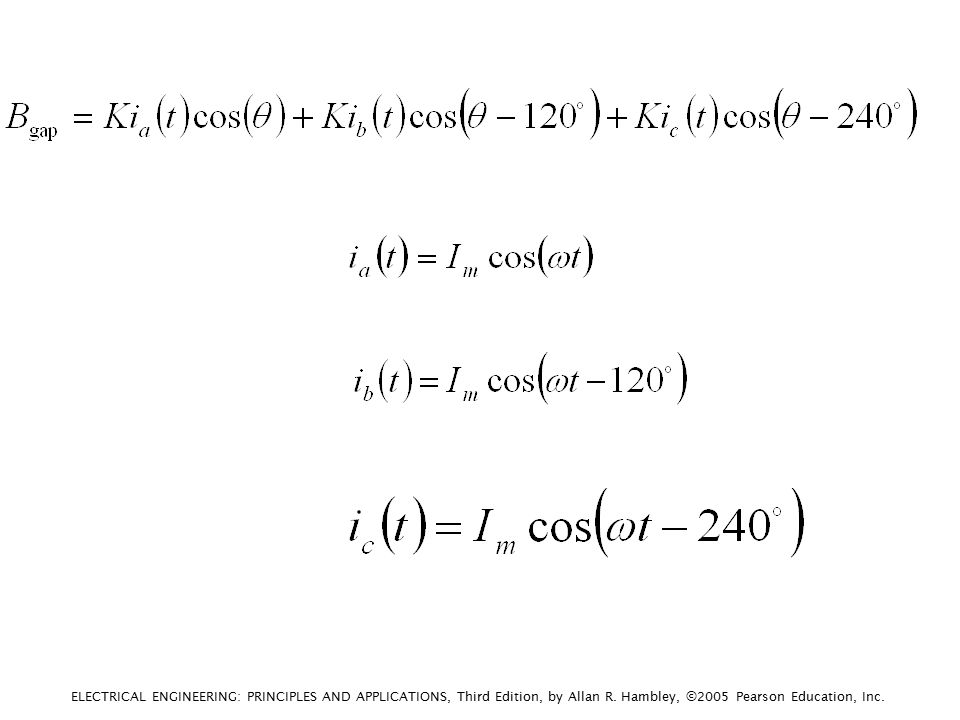
Rotating Stator Field We see that the stator windings of three- phase induction machines set up magnetic poles that rotate around the circumference of the stator.

6
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

12
Thus, the field in the gap rotates counterclockwise with an angular speed ω.

13
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

14
Synchronous Speed

15
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

16
The direction of rotation of a three-phase induction motor can be reversed by interchanging any two of the three line connections to the three-phase source.

17
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

19
Squirrel-Cage Induction Machines

20
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Slip and Slip Frequency

21
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

22
Effect of Rotor Inductance on Torque

23
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

25
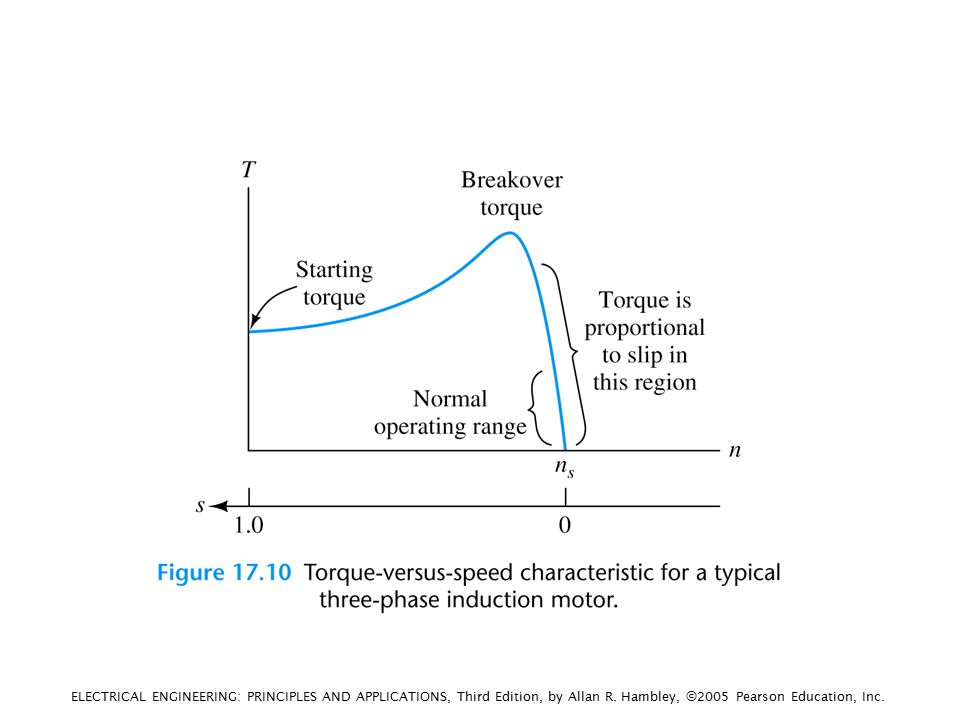
Torque–Speed Characteristic For small values of slip, developed torque is proportional to slip.

26
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

27
Motor designers can modify the shape of the torque–speed curve by changing various aspects of the machine design such as the cross section and depth of the rotor conductors.

28
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

30
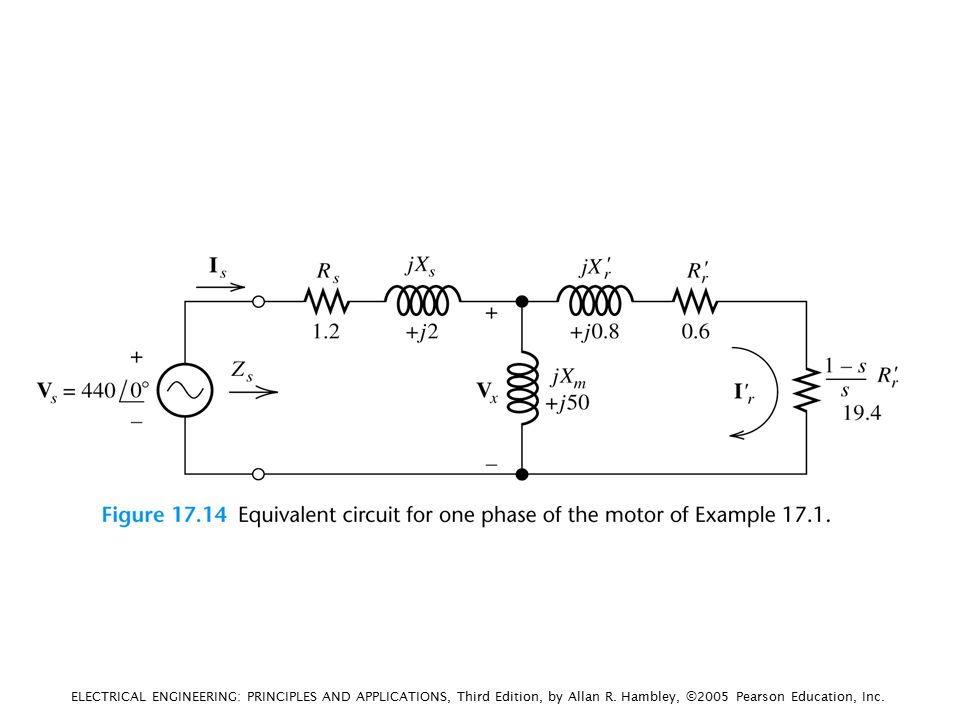
Induction-Motor Equivalent Circuit

31
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Phase versus Line Quantities The voltage V s across each winding and current I s through each winding shown in Figure 17.13 are called the phase voltage and phase current, respectively. The windings of an induction motor may be connected in either a delta or a wye.

32
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Relationships between line and phase quantities for a delta-connected motor.

33
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Relationships between line and phase quantities for a wye-connected motor.

34
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Power and Torque Calculations

35
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

40
Selection of Induction Motors Some of the most important considerations in selecting an induction motor are: 1. Efficiency 2. Starting torque 3. Pull-out torque 4. Power factor 5. Starting current

41
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

42
SYNCHRONOUS MACHINES Generation of electrical energy by utility companies is done almost exclusively with synchronous machines. Assuming a constant frequency source, the speed of a synchronous motor does not vary with load. The stator windings of a synchronous machine are basically the same as those of an induction machine.

43
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Electrical Angles Angles can be measured in electrical degrees for which the angle between adjacent north and south poles is 180°.

44
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. Field Components The total field rotating in the air gap is partly due to the dc currents in the rotor windings and partly due to the ac currents in the stator (armature) windings. Synchronous machines are designed so the flux varies sinusoidally around the air gap.
 windings. Synchronous machines are designed so the flux varies sinusoidally around the air gap..")
45
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. B total and B r are the magnitudes of the phasors B total and B r, respectively. δ is the electrical angle, called the torque angle, by which the rotor field lags the total field.

46
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

48
Equivalent Circuit

49
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

50
Potential for Power-Factor Correction The synchronous motor can act as a source of reactive power. Proper use of synchronous motors can lower energy costs of an industrial plant by increasing the power factor.

51
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

52
Operation with Variable Load and Constant Field Current

53
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

55
Operation with Constant Load and Variable Field Current

56
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

59
Starting Methods 1. Vary the frequency of the ac source starting very low. 2. Use a prime mover to bring the synchronous motor up to speed.

60
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc. 3. The rotors of many synchronous motors contain amortisseur or damper conductors, which are similar in structure to the squirrel- cage conductors used in induction motors. Thus, the motor can be started as an induction motor with the field windings shorted and without load.

61
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

63
Basic Single-Phase Induction Motor The pulsating flux produced by the main winding can be resolved into two counterrotating components.

64
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

67
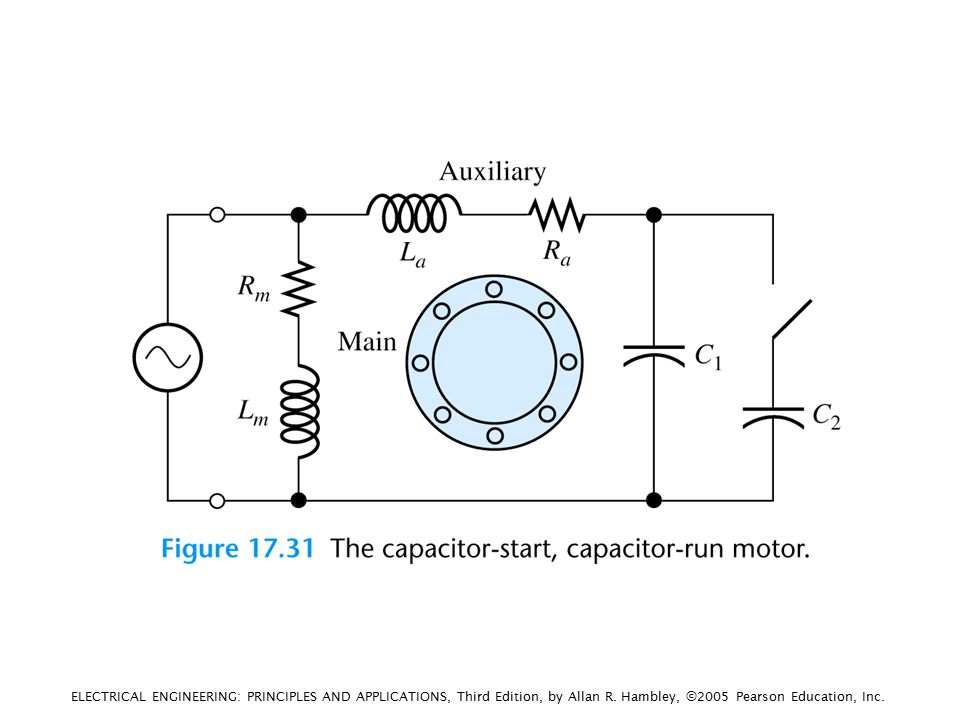
Auxiliary Windings Two windings that are 90° apart physically and carrying currents 90° apart in phase produce a rotating magnetic field. Single-phase induction motors contain an auxiliary winding displaced by 90 electrical degrees from the main winding.

68
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

69
Shaded-Pole Motors Shaded-pole motors are used for inexpensive low-power applications.

70
ELECTRICAL ENGINEERING: PRINCIPLES AND APPLICATIONS, Third Edition, by Allan R. Hambley, ©2005 Pearson Education, Inc.

71
STEPPER MOTORS Anytime you need accurate repeatable positioning, consider using a stepping motor.

Similar presentations















>")
>")
 CHAPTER SIX ……SYNCHRONOUS MOTORS.>")
















