Download presentation
Presentation is loading. Please wait.

1
Modern Control Systems (MCS) Dr. Imtiaz Hussain Assistant Professor email: imtiaz.hussain@faculty.muet.edu.pkimtiaz.hussain@faculty.muet.edu.pk URL :http://imtiazhussainkalwar.weebly.com/ Lecture-1 Introduction to the Subject & Review of classical control theory

2
Lecture Outline Introduction to the subject Review of Classical Control Theory – Transfer Function – Poles & Zeros – Stability – S-plane Introduction to Root Locus

3
Course Outline (MCS) Classical Control Design Root Locus Compensation PID Modern Control Design State Feedback Control State Observer Optimal Control
 Classical Control Design Root Locus Compensation PID Modern Control Design State Feedback Control State Observer Optimal Control")
4
Course Outline (MCS) Nonlinear Systems Linearization Common Physical nonlinearities Digital Control systems Review of Z-transform Z-plane analysis S-plane vs Z-plane
 Nonlinear Systems Linearization Common Physical nonlinearities Digital Control systems Review of Z-transform Z-plane analysis S-plane vs Z-plane")
5
REVIEW OF CLASSICAL CONTROL THEORY

6
Transfer Function The transfer function G(S) of the plant is ratio of Laplace transform of output to the Laplace transform of input considering initial conditions to zero. G(S) Y(S) U(S)
 Y(S) U(S).")
7
Transfer Function Transfer function helps us to check – The stability of the system – Time domain and frequency domain characteristics of the system – Response of the system for any given input 7

8
Stability of Control System Roots of denominator polynomial of a transfer function are called ‘poles’. And the roots of numerator polynomial of a transfer function are called ‘zeros’. 8

9
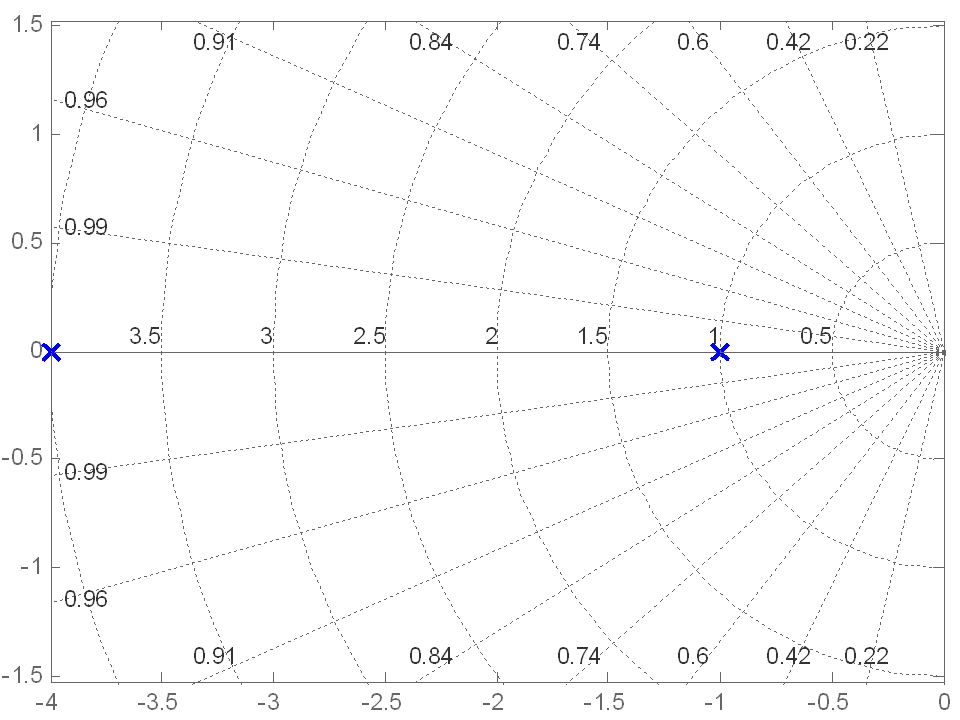
Stability of Control Systems The poles and zeros of the system are plotted in s-plane to check the stability of the system. 9 s-plane LHP RHP

10
Stability of Control Systems If all the poles of the system lie in left half plane the system is said to be Stable. If any of the poles lie in right half plane the system is said to be unstable. If pole(s) lie on imaginary axis the system is said to be marginally stable. 10 s-plane LHP RHP Absolute stability does not depend on location of zeros of the transfer function
 lie on imaginary axis the system is said to be marginally stable. 10 s-plane LHP RHP Absolute stability does not depend on location of zeros of the transfer function.")
12
ROOT LOCUS

13
What is Root Locus? The root locus is the path of the roots of the characteristic equation traced out in the s-plane as a system parameter varies from zero to infinity. Why we need to trace the root locus?

14
Introduction Consider a unity feedback control system shown below. The open loop transfer function G(s) of the system is And the closed transfer function is
 of the system is And the closed transfer function is.")
15
Introduction The open loop stability does not depend upon gain K. Whereas, the location of closed loop poles vary with the variation in gain.

16
Introduction Location of closed loop Pole for different values of K (remember K>0). KPole 0.5-1.5 1-2 2-3 3-4 5-6 10-11 15-16

17
How to Sketch root locus? One way is to compute the roots of the characteristic equation for all possible values of K. KPole 0.5-1.5 1-2 2-3 3-4 5-6 10-11 15-16

18
How to Sketch root locus? Computing the roots for all values of K might be tedious for higher order systems. KPole 0.5? 1? 2? 3? 5? 10? 15? Therefore we need a proper way to trace the root locus.

19
END OF LECTURES-1 To download this lecture visit http://imtiazhussainkalwar.weebly.com/

Similar presentations


 Dr. Imtiaz Hussain Assistant Professor>")
. + - + - + ->")


>")
>")


 Dr. Imtiaz Hussain URL :http://imtiazhussainkalwar.weebly.com/>")

>")


 Structure: Process Actuator Measure.>")



 Dr. Imtiaz Hussain URL :http://imtiazhussainkalwar.weebly.com/>")