Download presentation
Presentation is loading. Please wait.

1
Signal Processing Jeremy Wyatt Intelligent Robotics School of Computer Science

2
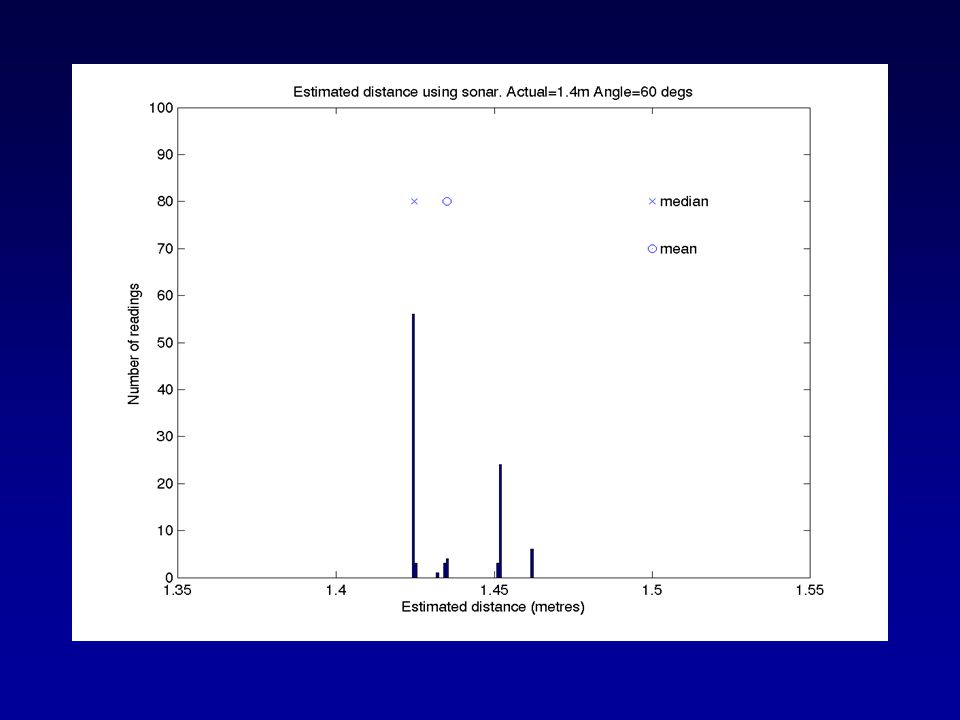
Sonar Sound wave transmitter/receiver Sound wave bounces back off objects Counter measures time of flight Calculates the distance assuming speed of sound is ~335ms -1 Errors due to specular reflection

3
Typical data We gathered 100 samples from a sonar in three positions relative to a wall You get a figure for time of flight (T) in units of 0.5 microseconds To convert to metres Metres per millisecond 0.5 secs in each millisecond Sound travels twice the distance to the object
 in units of 0.5 microseconds To convert to metres Metres per millisecond 0.5 secs in each millisecond Sound travels twice the distance to the object")
6
Median and mean Order the values by size take the central value, here 1.425 mean is ~1.458 median is more robust to outliers 1.41, 1.38, 1.71, 1.45, 1.42, 1.39, 1.43, 1.47 1.38, 1.39, 1.41, 1.42, 1.43, 1.45, 1.47, 1.71

7
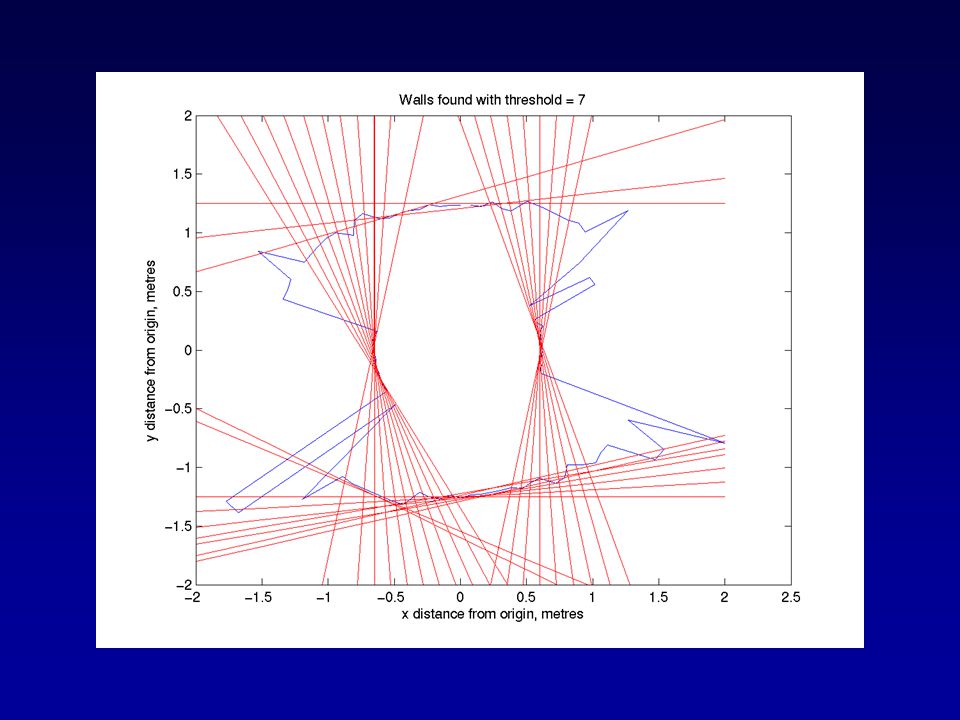
Mapping We took 25 sonar readings each at 100 equally spaced angles between 0 and 360 degrees

8
Plot range versus angle Range in metres Angle in degrees

9
Convert to Cartesian frame x y r

10
r r (x,y)
")
11
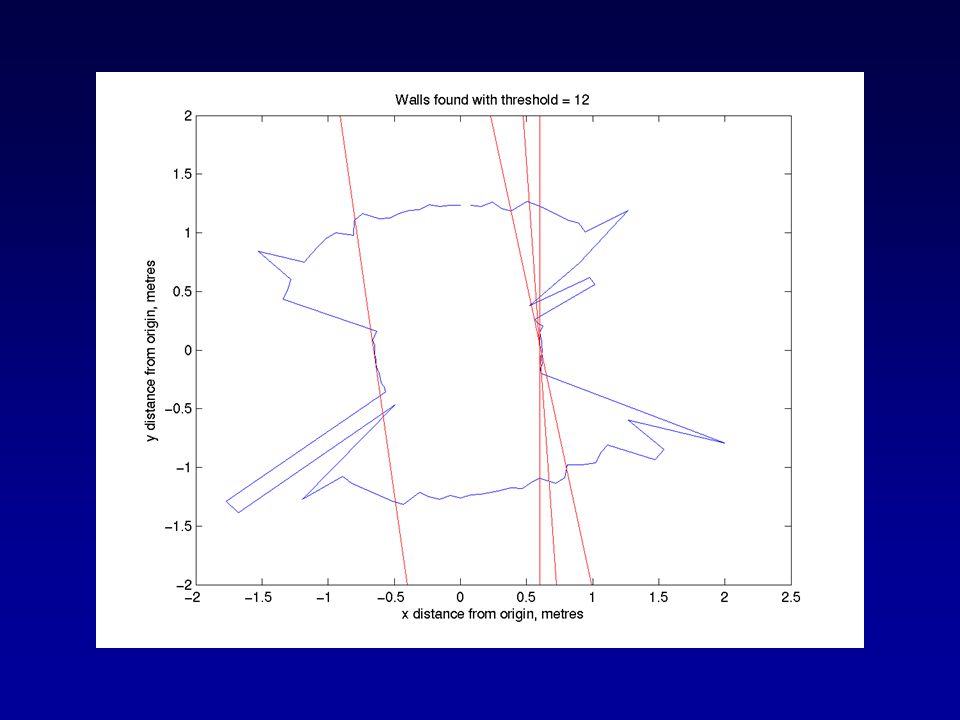
Finding Walls Assume walls are straight lines Each point is on many possible lines Each line can be described by an equation

12
w

13
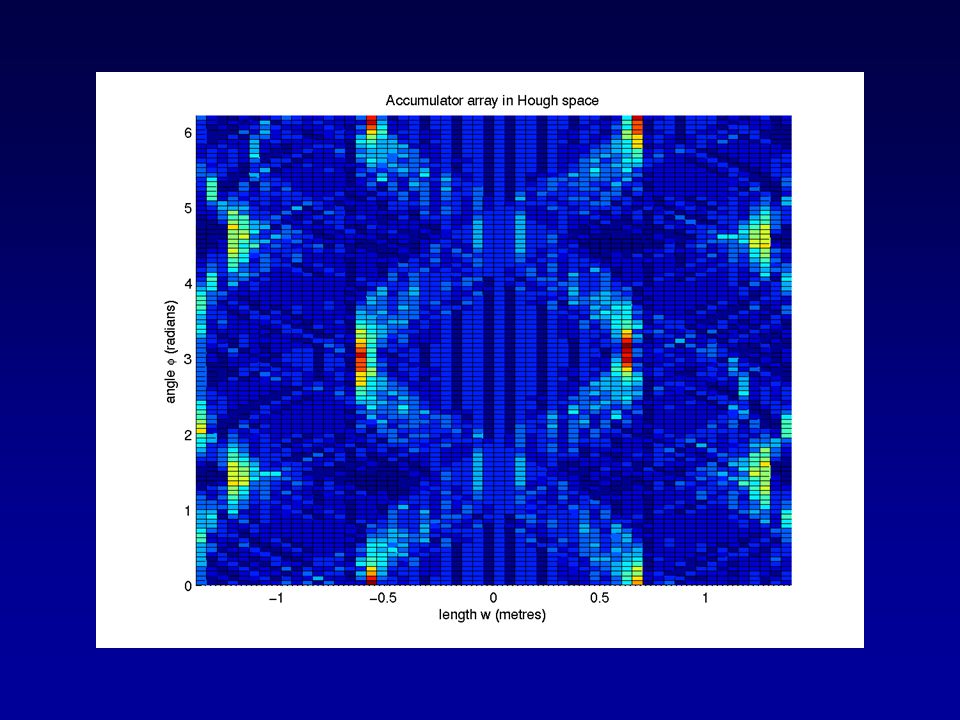
Hough Transform Create and w for all possible lines Create an array A indexed by and w for each point (x,y) for each angle w = x*cos( )+ y*sin( ) A[ ,w] = A[ ,w]+1 end where A > Threshold return a line
![Hough Transform Create and w for all possible lines Create an array A indexed by and w for each point (x,y) for each angle w = x*cos( )+ y*sin( ) A[ ,w] = A[ ,w]+1 end where A > Threshold return a line](http://images.slideplayer.com/16/5120705/slides/slide_13.jpg "Hough Transform Create and w for all possible lines Create an array A indexed by and w for each point (x,y) for each angle w = x*cos( )+ y*sin( ) A[ ,w] = A[ ,w]+1 end where A > Threshold return a line")
18
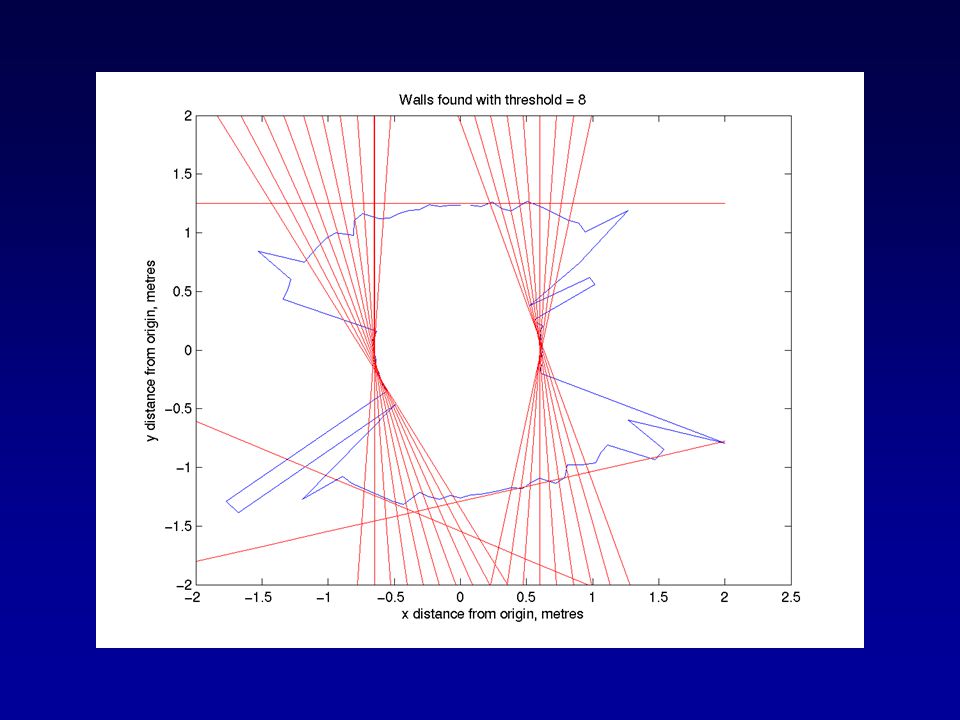
Summary Use median Hough finds lines But because of width of sonar beam gives bad results May be better with Infra Red Smooth in Hough Space Use property of sonar

Similar presentations
















 between pairs of images. We are given 100 points with a correlation score computed.>")



 Linear Motion (Constant Acceleration) Mechanics M1.>")
