Download presentation
Presentation is loading. Please wait.

1
Robots An Introduction

2
Various Robot Fields: Aerospace (air travel, space exploration) Exploration (underwater, space, volcanic) Entertainment Medical Manufacturing Military
 Exploration (underwater, space, volcanic) Entertainment Medical Manufacturing Military")
3
Robot Fields: Medical See http://www.childrenshospital.org/clinicalservices/Site1860/mainp ageS1860P0.html

5
Robot Fields: Military

6
Robot Fields: Service

7
Robot Fields: Exploration

8
Robot Fields: Manufacturing

9
MANUFACTURING Robot Definition (4 distinctions) A robot is an automatically controlled, reprogrammable, multipurpose, manipulative machine with several reprogrammable axis, which may be either fixed in place or mobile for use in industrial automation applications.
 A robot is an automatically controlled, reprogrammable, multipurpose, manipulative machine with several reprogrammable axis, which may be either fixed in place or mobile for use in industrial automation applications.")
10
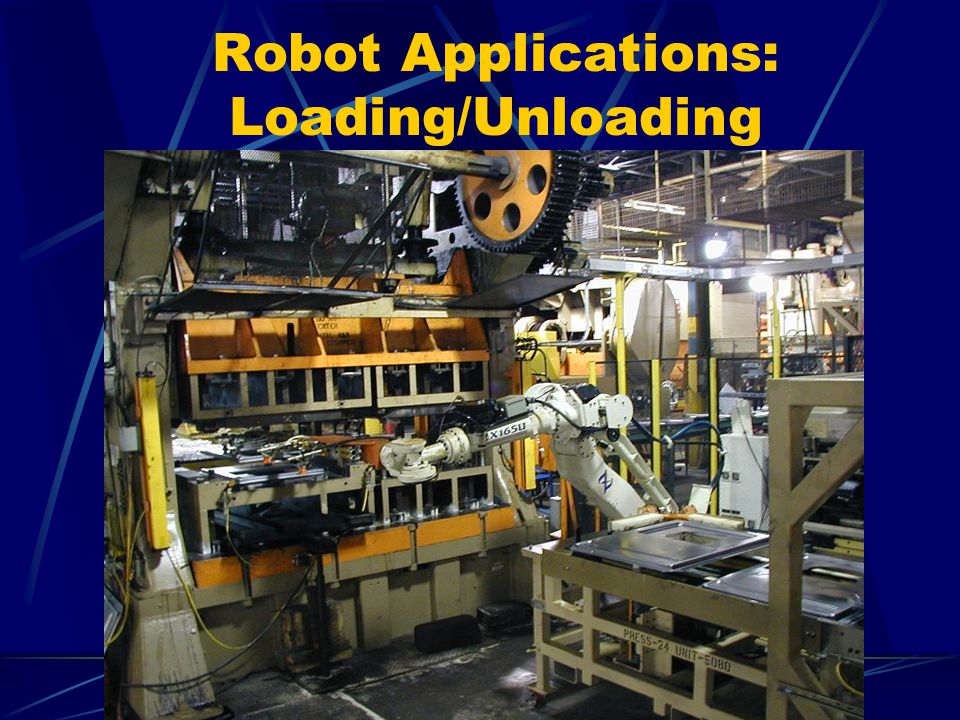
Industrial Robot Applications (1 st distinction) AKA Multi-functional / Multipurpose May perform many operations such as welding, bending, moving, breaking, etc.
 AKA Multi-functional / Multipurpose May perform many operations such as welding, bending, moving, breaking, etc.")
11
Robot Applications: Loading/Unloading

13
Robot Applications: Arc Welding

16
Robot Applications: Plasma Arc Welding

17
Robot Applications: Spot Welding

18
Robot Applications: Testing/Inspection

19
Robot Applications: Grinding / Deburring

20
Robot Applications: Pick and Place / Palletizing

21
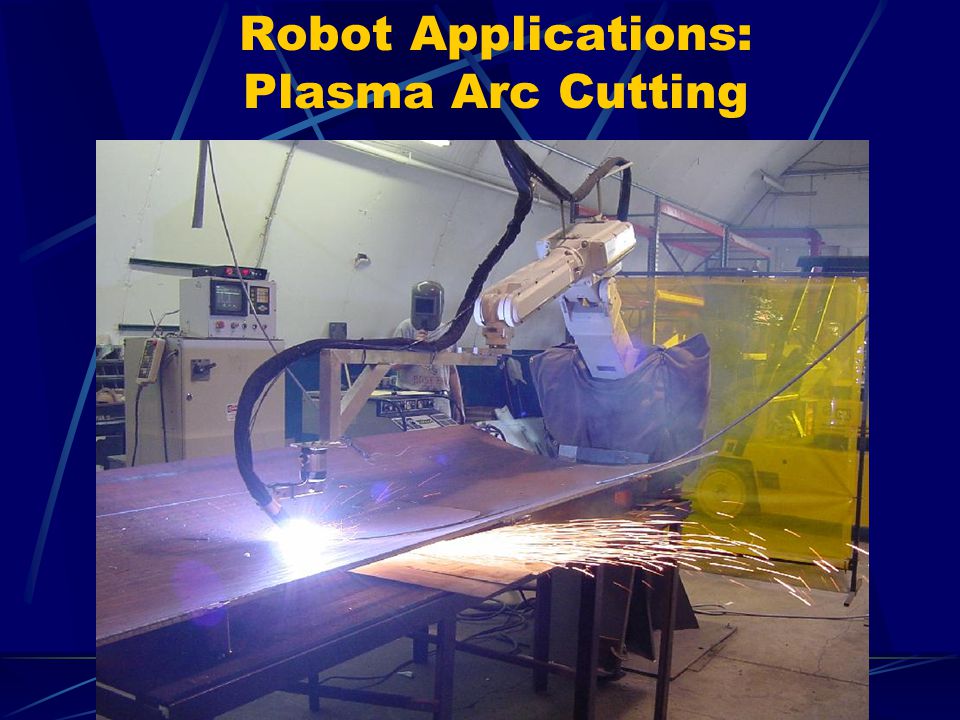
Robot Applications: Plasma Arc Cutting

24
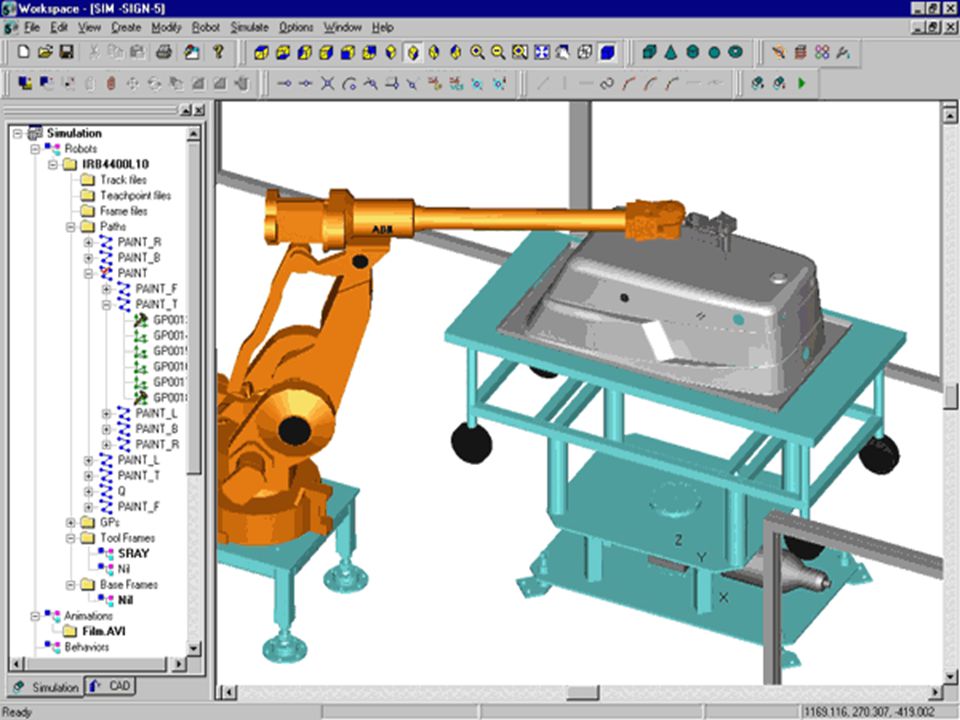
Robot Applications : Spray Painting

26
Robot Applications: Adhesive Application

27
Robot Applications: Assembly

28
Other Common Robot Applications: Deflashing Measuring Waterjet Cutting

29
Manufacturing Robots are Reprogrammable: (2nd distinction) 1. Robot’s motion is controlled by written program, on or off-line 2. The program may be modified change motion

30
Robotic Controller: 1. Central processing unit (CPU)- microprocessor, performs calculations 2. Memory- stores data, regulates computation time 3. I/O devices- keyboard, outside computer, teach pendant, recorders, printers, screen 4. Software- AML, RAIL, Karel, APT, VAL, VAL2

31
Teaching Robots – Accomplished through: Teach pendants Teach terminals Controller front panels

32
Teaching Activities: 1. Robot power-up and preparation for programming 2. Entry and editing of programs 3. Program Compilation (error check and post processing) 4. Program execution *NOTE: not a sequence of steps for all robots
 4. Program execution *NOTE: not a sequence of steps for all robots.")
33
Programming Methods On-line – realtime connection of programming manipulator movements (downtime associated. Robot cannot produce value during on-line programming. However, what you see is what you get. Off-line- no physical connection of programmer with manipulator. Downtime minimized.

34
Offline Programming Utilized feature of Simulation software Allows cell to continue operations during programming Check for trouble areas and Suggest optimum path, tools (with simulation) Upload existing programs to be evaluated/changed (while robot is operating) Allows complex tool paths to be programmed easily (particularly with simulation) Minimize joint wear Very little time needed to refine operation
 Upload existing programs to be evaluated/changed (while robot is operating) Allows complex tool paths to be programmed easily (particularly with simulation) Minimize joint wear Very little time needed to refine operation")
35
Three Types of Programming: 1. Simulation 2. Structured Languages 3. Manual real-time or lead through

36
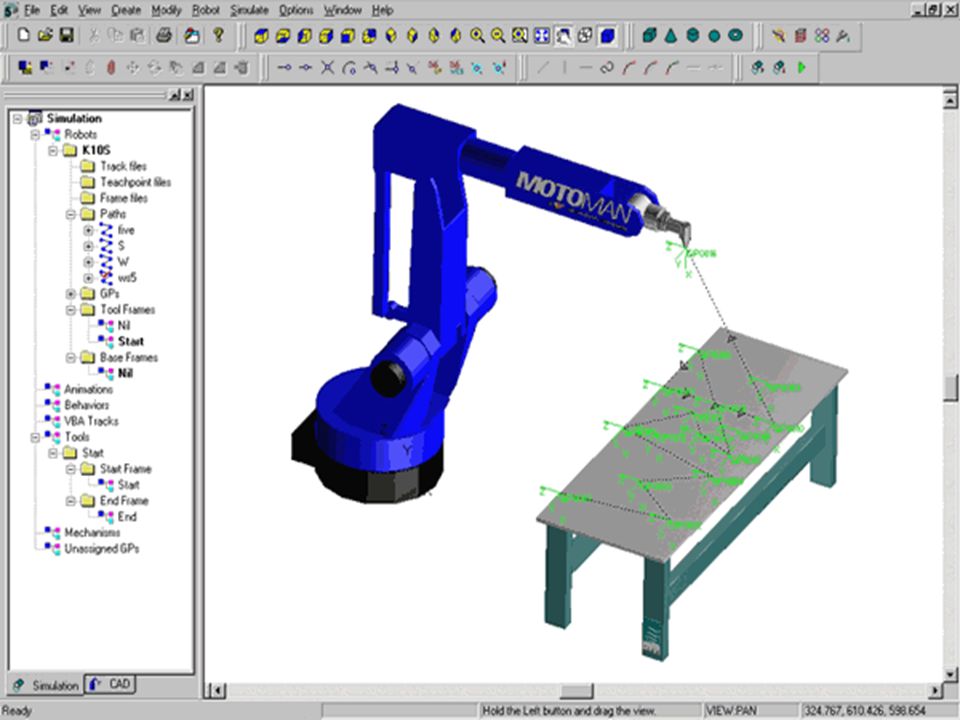
1) Robot Programming : GUI/Simulation
 Robot Programming : GUI/Simulation")
37
Simulation Tasks Offline Programming (OLP) Robot Evaluation and Set-up Ergonomics Safety Demonstration
 Robot Evaluation and Set-up Ergonomics Safety Demonstration")
42
Simulation: Evaluation and Set-Up Test “What-If” scenarios Changes in robot position Selection of robot model Part entry/movement/exit in cell Conveyor positioning Cell layout interferences with plant layout All can be modeled and virtually “Walked Through” using simulation.

44
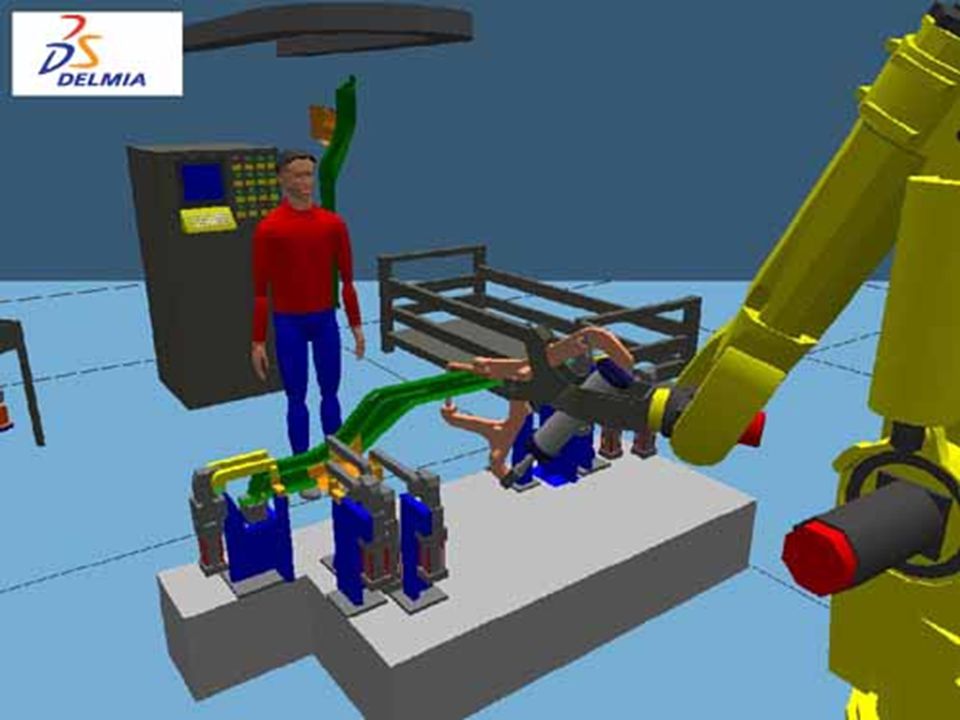
Simulation: Ergonomics & Safety Eliminates need for Programmer to be in work envelope during programming Evaluate Machine-Human interactions Operator/Laborer can be modeled along with equipment Safety features can be tested Cell and safety devices can be viewed from all angles before the actual building of the cell

46
2) Robot Programming : Structured Languages Typically offline programming Multiple scenarios can be scripted in very little time (for testing) Complex routines are made possible Typical capability with many of today’s simulation softwares.
 Robot Programming : Structured Languages Typically offline programming Multiple scenarios can be scripted in very little time (for testing) Complex routines are made possible Typical capability with many of today’s simulation softwares.")
47
Robot Programming : Structured Languages

48
3) Robot Programming : Manual Real-time (online) AKA Lead-Through Programming On-line programming – dedicated link between operator and manipulator Limited capability in testing multiple scenarios
 Robot Programming : Manual Real-time (online) AKA Lead-Through Programming On-line programming – dedicated link between operator and manipulator Limited capability in testing multiple scenarios")
49
Robot Programming : Manual Real-time

50
Why do we have robots? 1. Robots can work in hazardous environments 2. Robots can work 24 hours/day, 7 days/week 3. Robots can handle repetitious tasks (Repeatable) 4. Robots can work in sterile environments eliminating any risk of contamination
 4. Robots can work in sterile environments eliminating any risk of contamination.")
51
Why do we have robots? 5. Robots can be more precise than humans in some applications 6. Reprogrammable (flexible) 7. Variable sizes 8. Fast 9. Low hourly cost to operate
 7. Variable sizes 8. Fast 9. Low hourly cost to operate.")
52
Problems with robots: 1. Limited applications (movement restrictions) – limited capability 2. Can be costly (end-effectors, ROI) 3. Payload restrictions 4. Programming can take time 5. Repeatability can be lacking for some robots 6. Must be continuously maintained
 3. Payload restrictions 4. Programming can take time 5. Repeatability can be lacking for some robots 6. Must be continuously maintained.")
53
Robot System 1. Robot Arm(s) 2. Hardware- power supply and controller (communication interface which monitors and operates the equipment and sensors) 3. Equipment, devices, and sensors required for the robot to perform its task (electrical and fluid support systems) 4. The end-effector(s) – tooling performing work, grippers 5. Software- language used to communicate action of the manipulator
 3. Equipment, devices, and sensors required for the robot to perform its task (electrical and fluid support systems) 4. The end-effector(s) – tooling performing work, grippers 5. Software- language used to communicate action of the manipulator.")
54
Manipulator Power Sources: Control through electric-drive motors, pneumatic / hydraulic actuators.

55
End-Effector: AKA End-of-arm tooling Describes tooling (welders, adhesive applicators, hooking mechanisms) Gripper- open and closing mechanism designed to grasp parts, most grippers activated by compressed air (pneumatics)
 Gripper- open and closing mechanism designed to grasp parts, most grippers activated by compressed air (pneumatics)")
56
Terms: Accuracy- degree to which a robot arm is able to move to a specific position, Robot accuracy is usually one or two magnitudes greater than the arms repeatability. Repeatability- Repeatability is the degree to which a robot system is able to return to a specific point, the best in terms of repeatability on assembly robots is within.0005 inches.

57
Terms: Work Envelope- Space which the robot gripper can move Axis numbering- method used to describe the axes of motion of a robot when programming (base to end-effector) Coordinate systems- XYZ, ABC, number of coordinates required to define a point is determined by the number of degrees of freedom present on the robot
 Coordinate systems- XYZ, ABC, number of coordinates required to define a point is determined by the number of degrees of freedom present on the robot")
58
Terms: Degree of freedom- [typical industrial robots have four to seven degrees of freedom] each axis has a degree of freedom within the work envelope Duty cycle- the ratio of run time to the total operational time that a robot can continuously work with the rated payload at rated conditions (e.g., speed, acceleration, and temperature) without overheating or degrading the robot specifications
![Terms: Degree of freedom- [typical industrial robots have four to seven degrees of freedom] each axis has a degree of freedom within the work envelope Duty cycle- the ratio of run time to the total operational time that a robot can continuously work with the rated payload at rated conditions (e.g., speed, acceleration, and temperature) without overheating or degrading the robot specifications](http://images.slideplayer.com/16/4905027/slides/slide_58.jpg "Terms: Degree of freedom- [typical industrial robots have four to seven degrees of freedom] each axis has a degree of freedom within the work envelope Duty cycle- the ratio of run time to the total operational time that a robot can continuously work with the rated payload at rated conditions (e.g., speed, acceleration, and temperature) without overheating or degrading the robot specifications")
59
Terms: Payload- load capacity of a robot Payload = Tooling Weight [EOA] + Part Weight Rated payload Maximum payload
![Terms: Payload- load capacity of a robot Payload = Tooling Weight [EOA] + Part Weight Rated payload Maximum payload](http://images.slideplayer.com/16/4905027/slides/slide_59.jpg "Terms: Payload- load capacity of a robot Payload = Tooling Weight [EOA] + Part Weight Rated payload Maximum payload")
Similar presentations