Download presentation
Presentation is loading. Please wait.

1
Harmonic Motion P221, November 22 nd, 2013

2
Review of Simple Harmonic Motion System at rest Displace mass, stretches spring Restoring force is proportional to displacement 0x F

3
More Review No external forces energy conserved Kinetic is converted to potential, vice versa Velocity at ends is 0 “turning point” Fastest at center Frequency is constant t F v

4
Sines & Cosines Restoring force is linear AND in opposite direction to displacement

5
Sines & Cosines Restoring force is linear AND in opposite direction to displacement Combination of sines & cosines can solve this

6
Sines & Cosines Restoring force is linear AND in opposite direction to displacement Combination of sines & cosines can solve this Angular frequency is ALWAYS (and independent of amplitude) “Coordinate” could be x or or anything else
 Coordinate could be x or or anything else")
7
Sines & Cosines Restoring force is linear AND in opposite direction to displacement Combination of sines & cosines can solve this Angular frequency is ALWAYS (and independent of amplitude) “Coordinate” could be x or or anything else Has a physical interpretation
 Coordinate could be x or or anything else Has a physical interpretation")
8
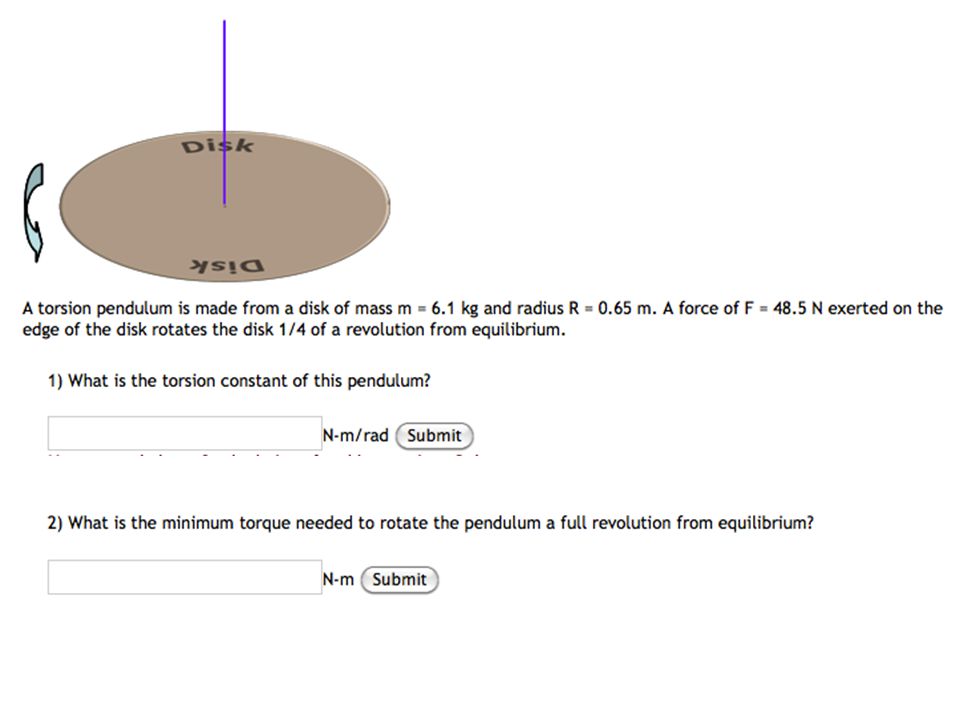
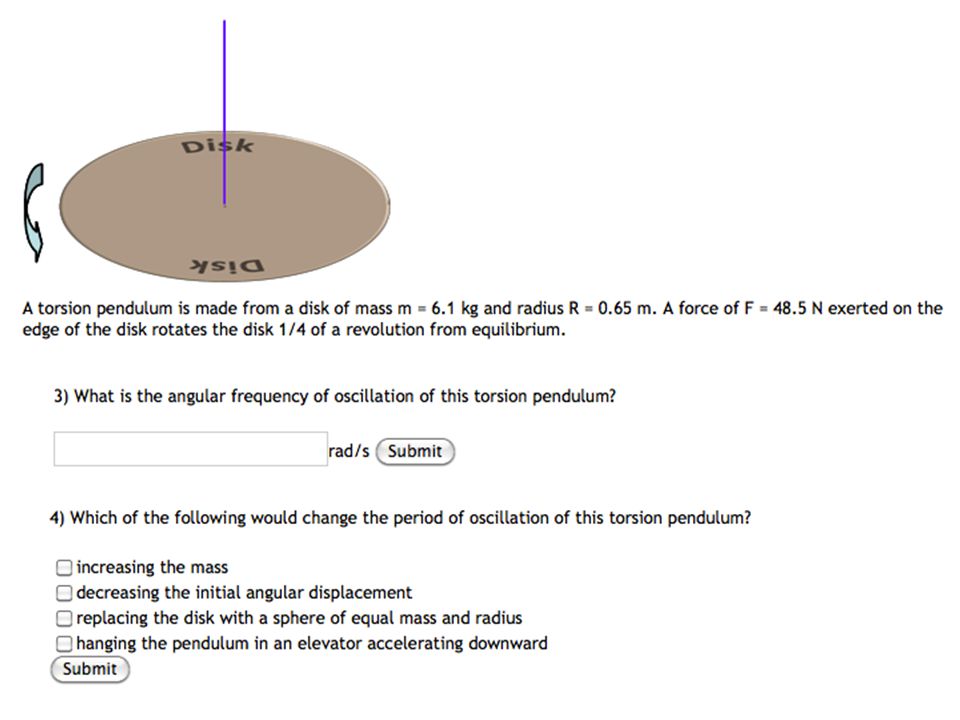
Simple Pendulum ( coordinate) Rotational Oscillation ( ) Torque is proportional to angular displacement 1-D Spring and Block (x) Force is proportional to positional displacement I wire could be mg or torsional strength
 Rotational Oscillation ( ) Torque is proportional to angular displacement 1-D Spring and Block (x) Force is proportional to positional displacement I wire could be mg or torsional strength")
9
Simple Pendulum ( coordinate) Rotational Oscillation ( ) 1-D Spring and Block (x) I wire
 Rotational Oscillation ( ) 1-D Spring and Block (x) I wire ")
10
Simple Pendulum ( coordinate) Rotational Oscillation ( ) Torque is proportional to angular displacement 1-D Spring and Block (x) Force is proportional to positional displacement I wire
 Rotational Oscillation ( ) Torque is proportional to angular displacement 1-D Spring and Block (x) Force is proportional to positional displacement I wire ")
11
Simple Pendulum ( coordinate) Rotational Oscillation ( ) Torque is proportional to angular displacement 1-D Spring and Block (x) Force is proportional to positional displacement I wire
 Rotational Oscillation ( ) Torque is proportional to angular displacement 1-D Spring and Block (x) Force is proportional to positional displacement I wire ")
12
Clicker Question Systems 1 & 2 are oscillating at their own frequencies. We then double the masses. Do the frequencies change? A) Both change B) Neither change C) Only system 1 changes D) Only system 2 changes System 1 System 2 m m
 Both change B) Neither change C) Only system 1 changes D) Only system 2 changes System 1 System 2 m m.")
13
Clicker Question Systems 1 & 2 are oscillating at their own frequencies. We then double the masses. Do the frequencies change? A) Both change B) Neither change C) Only system 1 changes D) Only system 2 changes System 1 System 2 m m
 Both change B) Neither change C) Only system 1 changes D) Only system 2 changes System 1 System 2 m m.")
14
Clicker Question: Discussion System 1: k is a spring constant that is independent of mass System 1 System 2 m m

15
Clicker Question: Discussion System 1: k is a spring constant that is independent of mass System 2: both restorative force and moment of inertia are proportional to mass System 1 System 2 m m

16
Physical Pendulum RCMRCM Mg X CM

17
Physical Pendulum RCMRCM Mg arc-length R CM XCMXCM RCMRCM X CM

18
Physical Pendulum RCMRCM Mg arc-length R CM XCMXCM RCMRCM X CM

19
Physical Pendulum X CM RCMRCM Mg arc-length R CM XCMXCM RCMRCM

20
Physical Pendulum For small X CM RCMRCM Mg arc-length R CM XCMXCM RCMRCM

21
Physical Pendulum For small X CM RCMRCM Mg arc-length R CM XCMXCM RCMRCM

22
Physical Pendulum For small X CM RCMRCM Mg arc-length R CM XCMXCM RCMRCM

23
Physical Pendulum For small X CM RCMRCM Mg arc-length R CM XCMXCM RCMRCM

24
Physical Pendulum For small X CM RCMRCM Mg arc-length R CM XCMXCM RCMRCM

25
The Simple Pendulum IS a Physical Pendulum The general case CM pivot R CM The simple case L

26
A Specific Case: Stick Pendulum M pivot R CM CM

27
A Specific Case: Stick Pendulum M pivot R CM CM

28
A Specific Case: Stick Pendulum M pivot R CM CM

29
A Specific Case: Stick Pendulum M pivot R CM CM

30
A Specific Case: Stick Pendulum M pivot R CM CM Same period

31
Clicker Question In Case 1 a stick of mass m and length L is pivoted at one end and used as a pendulum. In Case 2 a point particle of mass m is attached to the center of the same stick. Which pendulum has the longer period? A) Case 1 B) Case 2 C) Same Case 1 m Case 2 m m
 Case 1 B) Case 2 C) Same Case 1 m Case 2 m m.")
32
Clicker Question: Prelude In Case 1 a stick of mass m and length L is pivoted at one end and used as a pendulum. In Case 2 a point particle of mass m is attached to a string of length L 2 ? Which as the longer period? A) Case 1 B) Case 2 C) Same Case 1 m
 Case 1 B) Case 2 C) Same Case 1 m.")
33
Case 2 Clicker Question: Prelude In Case 1 a stick of mass m and length L is pivoted at one end and used as a pendulum. In Case 2 a point particle of mass m is attached to a string of length L 2 ? Which as the longer period? A) Case 1 B) Case 2 C) Same Case 1 m
 Case 1 B) Case 2 C) Same Case 1 m.")
34
m Case 2 Prelude Answer Remember period is inversely proportional to rotational frequency therefore

35
Clicker Question: Prelude 2 We know that T 1 > T 2. Now suppose these pendula are “glued” together from the same pivot. What is the new period? A) T 1 B) T 2 C) In Between m T1T1 T2T2 T1 T2T1 T2 m m +=
 T 1 B) T 2 C) In Between m T1T1 T2T2 T1 T2T1 T2 m m +=.")
36
Clicker Question: Prelude 2 We know that T 1 > T 2. Now suppose these pendula are “glued” together from the same pivot. What is the new period? A) T 1 B) T 2 C) In Between m T1T1 T2T2 T1 T2T1 T2 m m +=
 T 1 B) T 2 C) In Between m T1T1 T2T2 T1 T2T1 T2 m m +=.")
37
Clicker Question: Discussion We know that T 1 > T 2 and T of the “glued” pendulum is in between. We have proven T 1 is the longest. But, let’s calculate in detail! m T1T1 T1 T2T1 T2 T2T2 m m

38
Case 2 m m m Case 1 Clicker: Detailed Answer

39
Case 2 m m m Case 1 Clicker: Detailed Answer

40
Case 2 m m m Case 1 Clicker: Detailed Answer

41
Case 2 m m m Case 1 Clicker: Detailed Answer

42
Case 2 m m m Case 1 Clicker: Detailed Answer

43
Mechanics Lecture 21, Slide 43

44
Mechanics Lecture 21, Slide 44

45
Mechanics Lecture 21, Slide 45

46
Mechanics Lecture 21, Slide 46

47
At t 0, y 0, moving down Mechanics Lecture 21, Slide 47

48
At t 0, y 0, moving down Use energy conservation to find A Mechanics Lecture 21, Slide 48

49
At t 0, y 0, moving down Use energy conservation to find A Mechanics Lecture 21, Slide 49

50
Mechanics Lecture 21, Slide 50

51
Mechanics Lecture 21, Slide 51 Or similarly

52
Mechanics Lecture 21, Slide 52

53
Mechanics Lecture 21, Slide 53

54
Mechanics Lecture 21, Slide 54

55
Mechanics Lecture 21, Slide 55

Similar presentations

>")






 for.>")










