Download presentation
Presentation is loading. Please wait.

1
3D Skeletons Using Graphics Hardware Jonathan Bilodeau Chris Niski

2
Outline Background Goal Method –Find points that lie on the graph –Extract vertices/edges from points Results Problems Future Work

3
Background Two general techniques for computing shape descriptors –Statistical shape descriptors –Structural shape descriptors Statistical shape descriptors work well when comparing objects that cannot be deformed Also need to potentially store large amounts of data

4
Background Structural shape descriptors are simple geometrical descriptions of a more complex model Generally the structural shape descriptor takes the form of a skeleton of the mesh Skeleton representation is efficient if properly computed as it takes up little space, and can compare deformed objects, as well as perform partial matching

5
Computing the skeleton In 2D the traditional method of computing the skeleton is to use the Euclidian Distance Transform –Basically find the center line of a 2d contour –Another method is to use waves propagating inward from the surface

6
Example borrowed from Mishas class notes Surface EDT

7
The EDT is expensive to compute –On 2 m for 2D –On 3 m for 3D No good/fast 3D equivalent –Usually mesh thinning is used to calculate the skeleton

8
Goal Using graphics hardware, create a 3D graph of a model –Slice the model along each coordinate axis –Find 2D skeleton with GH, merge them –Find intersection –Extract graph Capture 3d axis information Intersection will remove random noise Simple transition to a graph –only vertices and edges –No sheets

9
Method Voxelize the model Consider each slice of the volume along each axis –Gives you a 2D contour Compute the skeleton of each 2D contour

10
Method – Finding 2D skeleton Using Graphics hardware –For each point on the contour draw a code centered on the point, pointing at the viewer. –Read back the depth buffer –Analogous to a distance transform

11
Method – Finding 2D skeleton Look for discontinuities in the EDT –Scan columns/rows looking for points where both neighbors are smaller –Every point that passes is marked true

12
Method Output is a 2D skeleton Merge the 2D skeletons into a volume again Intersect each volume –One from each axis

13
Method – Noise Noise around the perimeter

14
Method – Noise Red dots indicate points that allowed a skeleton point in the center of this circle

15
Method – Noise Removal Angle between blue lines is small Remove points that have a small angle

16
Method – Noise Removal Keep points above 90 degrees D < Sqrt(2)*R
*R")
17
Method Once the EDT of the mesh is calculated we need to fit a skeleton to the resulting points The EDT voxel grid is not necessarily connected, ie. Voxels may not have neighbours

18
Fitting Skeleton Start by assigning an edge to each point that has several neighbours Begin merging the edges based on several criteria –Distance between the two edges –Length of the edges –The angle between the two edges Stop merging when no suitable candidates are present

19
Fitting Skeleton We also discard some of the edges –If they are short and do not have an edge to merge with –Not attached to the rest of the graph

23
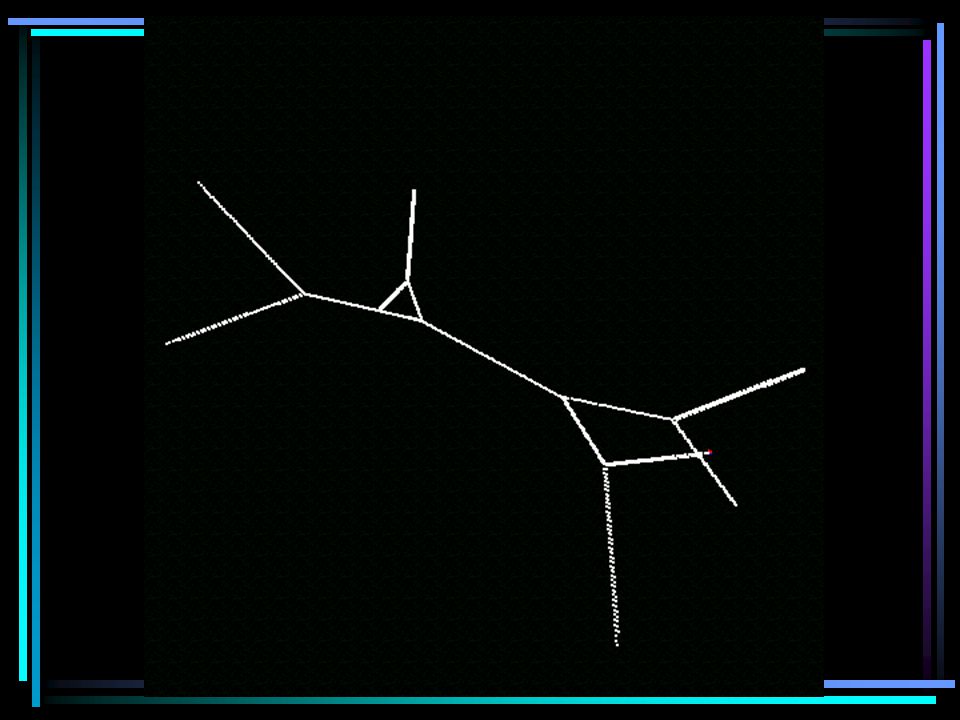
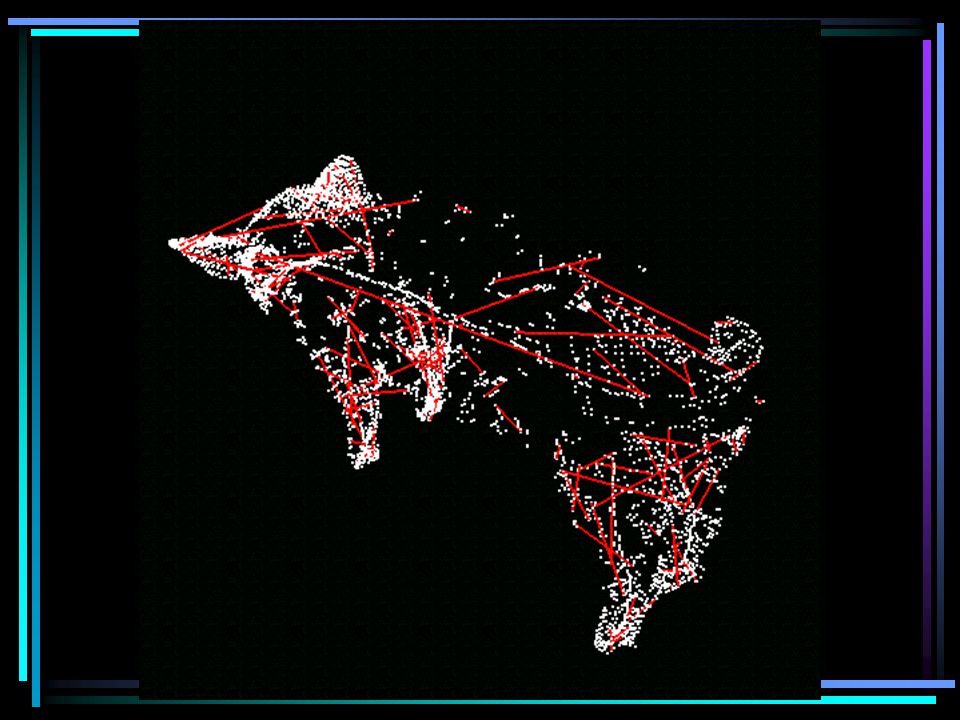
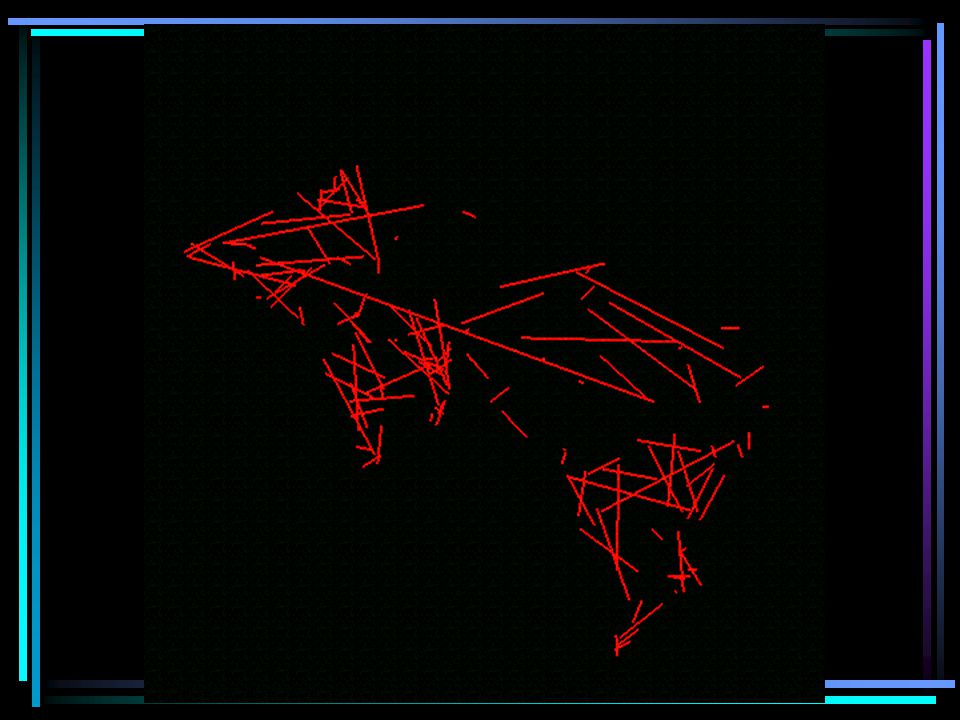
Results We can extract a voxel grid containing the mesh skeleton Filter the grid to remove some of the noise Fit a skeleton onto the grid to compactly represent the grid points

24
Sample results

25
Problems - Voxelation Still can’t remove all the noise –Have to be conservative with the noise test or else you throw out large chunks of the valid skeleton

26
Problems - Orientation Objects that aren’t axis aligned don’t work. Results in sheets –Traditional 3D MA has sheets –Contradicts one of our goals

27
Problems General problems with skeleton based approach: –The skeleton is not very descriptive –Can be very susceptible to noise –If connectivity changes after deformation, comparison becomes very difficult –Hard to capture just the right amount of detail

28
Problems with our approach: –Our version of the EDT still creates noise around the surface of the mesh –Noise on the surface of the mesh creates false edges which can merge with good edges

31
Future Work Try other methods for finding 2D skeleton that are less prone to noise –Before voxelation? –High resolution 2D images that get down sampled? Can’t keep high resolution for 3D What affect would aliasing have?

32
Future Work Orientation problem –Instead of using the coordinate axis, find the EGI with a relatively small number of bins. Flip any normals with –z components –Find axis volume relative to the dominant normals Problem lining up volumes with arbitrary rotations

Similar presentations





 University of Louisiana at Lafayette 3D Surface Localization.>")
 Dr.Çağatay ÜNDEĞER Instructor Middle East Technical University, GameTechnologies & General Manager.>")














