Download presentation
1
Chapter 15 Probabilistic Reasoning over Time

2
Chapter 15, Sections 1-5 Outline Time and uncertainty Inference: ltering, prediction, smoothing Hidden Markov models Kalman lters (a brief mention) Dynamic Bayesian networks Particle ltering
 Dynamic Bayesian networks Particle ltering")
3
Time and uncertainty The world changes; we need to track and predict it Diabetes management vs vehicle diagnosis Basic idea: copy state and evidence variables for each time step

4
Markov processes (Markov chains)
")
5
Example

6
Inference tasks

7
Filtering

8
Filtering example

9
Smoothing

10
Smoothing example

11
Most likely explanation

12
Viterbi example

13
Hidden Markov models

14
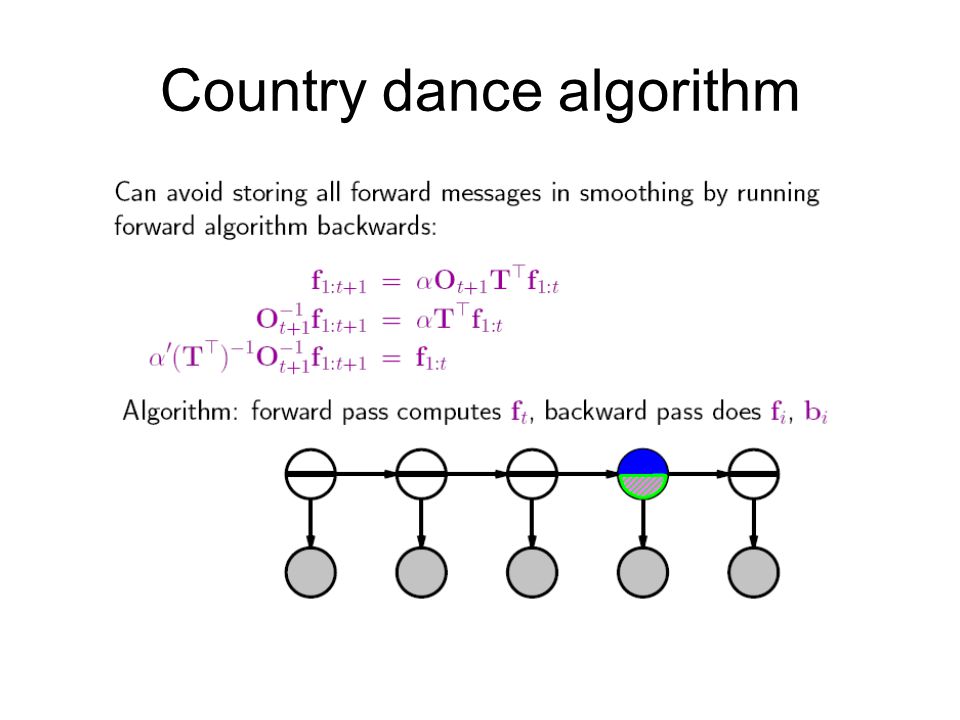
Country dance algorithm

24
Kalman lters

25
Updating Gaussian distributions

26
Simple 1-D example

27
General Kalman update

28
2-D tracking example: ltering

29
2-D tracking example: smoothing

30
Where it breaks

31
Dynamic Bayesian networks

32
DBNs vs. HMMs

33
DBNs vs Kalman lters

34
Exact inference in DBNs

35
Likelihood weighting for DBNs

36
Particle ltering

37
Particle ltering contd.

38
Particle ltering performance

39
Chapter 15, Sections 1-5 Summary

40
Chapter 15, Section 6 Outline Speech as probabilistic inference Speech sounds Word pronunciation Word sequences

41
Speech as probabilistic inference

42
Phones

43
Speech sounds

44
Phone models

45
Phone model example

46
Word pronunciation models

47
Isolated words

48
Continuous speech

49
Language model

50
Combined HMM

51
DBNs for speech recognition

52
Chapter 15, Section 6 Summary Since the mid-1970s, speech recognition has been formulated as probabilistic inference Evidence = speech signal, hidden variables = word and phone sequences "Context" effects (coarticulation etc.) are handled by augmenting state Variability in human speech (speed, timbre, etc., etc.) and background noise make continuous speech recognition in real settings an open problem
 are handled by augmenting state Variability in human speech (speed, timbre, etc., etc.) and background noise make continuous speech recognition in real settings an open problem")











>")
 – Observable.>")












 Process A temporal process is the evolution of system state over time Often the system state.>")


